礦用多電機驅動刮板輸送機功率平衡控制研究
2020-04-12 15:13:28吳佳佳
機械管理開發 2020年12期
關鍵詞:變頻器
吳佳佳
(霍州煤電集團豐裕煤業公司安裝分公司,山西 霍州031400)
引言
刮板輸送機作為采煤工作面重要的煤礦物料運輸裝備,當其輸送能力達到一定程度時,單個電機已經無法滿足實際使用要求,此時需要同時使用多部電機進行驅動[1-4]。采煤工作面環境相對繁雜,且刮板輸送機的煤礦物料輸送重量并非時刻保持不變,而是帶有一定的隨機性[5]。這種工況條件下,容易導致不同驅動電機之間出現功率不平衡的問題,對電機造成嚴重損害[6]。基于此,應采取有效措施確保刮板輸送機不同驅動電機之間的功率平衡,維持刮板輸送機運行過程的可靠性和穩定性。
1 礦用刮板輸送機基本情況概述
本文研究的礦用刮板輸送機具體型號為L1000EP,該型號刮板輸送機由JOY公司設計生產制造。刮板輸送機與采煤工作面平行布置,輸送機的整體長度為258 m,槽內寬度為1.13 m,擋煤板高度和鏈條中心距分別為1.25 m和0.28 m。輸送機鏈條運行速度以及整體輸送能力分別為1.41 m/s和3 500 t/h。采用的是中雙鏈形式,鏈輪半徑為0.165 m,齒數為7。刮板輸送機同時采用三部電機進行驅動,每部電機的功率為700 kW。其中機尾設置一部電機,電機與煤壁平行布置;機頭設置兩部電機,其中一部電機與煤壁平行布置,另外一部電機與煤壁垂直布置。由于采用的是多部電機同時驅動,所以需要考慮不同驅動電機之間的功率平衡問題。
2 多電機功率平衡控制基本原理
2.1 功率平衡控制基本原則
刮板輸送機在工作過程中,其輸送的煤礦物料重量隨時發生變化。對刮板輸送機多電機進行功率平衡控制的基本原則,就是根據輸送煤礦物料的重量對不同電機的輸出轉速進行合理控制,確保位于不同位置的電機輸出轉距之間的差值在可接受的范圍內,防止機頭和機尾部位驅動電機輸出轉距不匹配,導致電機出現欠載或者過載的問題,對電機造成不可挽回的損害。刮板輸送機由三部具有相同功率的電機同時進行驅動。正常工作條件下,電機輸出功率保持在最大輸出功率的80%左右,如果不同電機之間的功率控制不恰當容易導致部分電機出現過載的問題。
2.2 功率平衡控制基本思路
基于上述的刮板輸送機多電機功率平衡控制基本原則,并結合輸送機的基本工作原理,功率平衡控制基本思路可以概述如下:由于使用的三部電機型號完全相同,因此認為不同電機的機械特征完全相同。將機頭部位的兩部電機等效為一部電機,其容量為結尾部位電機的兩倍。假設經過機頭和機尾部位電機的電流值分別為i1和i2,可以根據電流值判斷外部負載情況。當i1和i2完全相同時,表明機頭和機尾電機負載情況正常,不存在過載問題,此時電機功率保持平衡。當i1和i2不相等時,表明機頭和機尾部位電機的功率存在不平衡問題,需要對兩個電流值進行進一步判斷。如果i1與i2的差值Δi始終大于0,且Δi超過了i2的5%,認為此時機頭部位電機存在過載問題,需要提升機尾部位電機轉動速度,確保機頭和機尾部位電機保持功率平衡。相反的,如果Δi始終小于0,則認為此時機尾部分電機存在過載問題,需要提升機頭部位電機的轉動速度,使不同部位電機功率保持平衡。如下頁圖1所示為刮板輸送機多電機功率平衡控制基本原理圖。
3 多電機功率平衡控制系統的研究
3.1 功率平衡控制系統總體構成
如下頁圖2所示為刮板輸送機多電機功率平衡控制系統總體結構圖。從圖中可以看出,整個系統由三部三相異步電動機及其對應的變頻器、控制器和CAN總線構成。控制器通過對變頻器的輸出頻率進行控制,進而實現對三相異步電機輸出轉速的控制。系統中不同硬件之間通過CAN總線實現數據信號的傳輸。結合煤礦實際情況,采用的礦用變頻器型號為BPJ 1-630/1140,控制器采用的是可編程邏輯控制器PLC,具體型號為S7-1200。
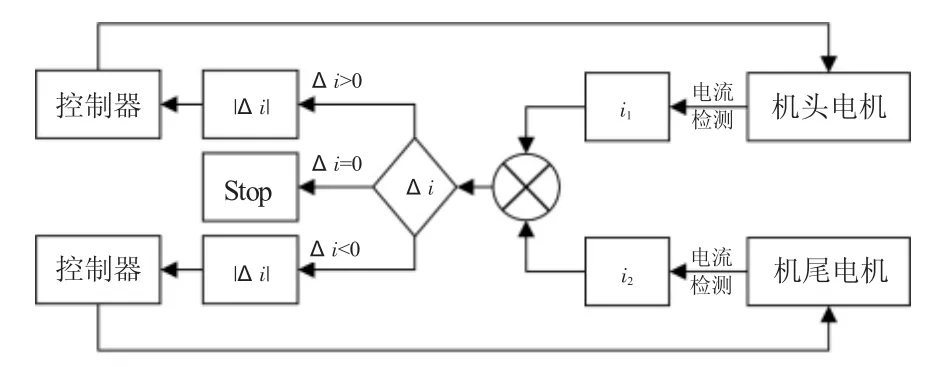
圖1 功率平衡控制原理框圖
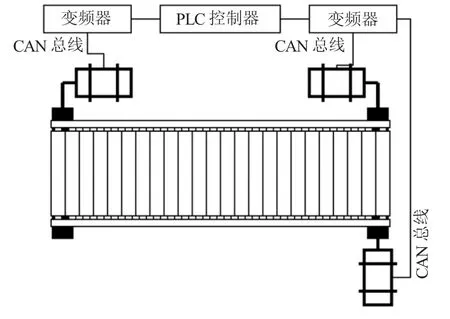
圖2 功率平衡控制系統總體結構圖
機尾一部電機采用單獨的變頻器,機頭兩部電機使用同一變頻器,目的在于確保機頭部位兩部電機具有相同的輸出轉速。CAN總線具有良好的通信穩定性,比較適合本研究中輸送距離較長的場景。變頻器可以對電機運行過程中的定子電流進行檢測,并將檢測結果通過CAN總線傳輸至PLC控制器中進行分析。控制器根據分析結果輸出控制信號,對變頻器的輸出電壓頻率進行控制,進而實現對電機輸出轉速的控制。
3.2 功率平衡控制系統方案設計
如圖3所示為刮板輸送機多電機功率平衡控制系統方案框圖。圖中i1和i2分別表示機頭和機尾部分電機的電流值,通過比較兩個電流值的大小可以判斷機頭機尾部位電機是否存在功率不平衡現象。如果機頭部位電機電流i1大于機尾部位電機電流i2,表明機頭部位電機存在過載現象。電機電流值與其負載大小存在正比例關系,可以根據電流值推算得到電機的負載大小,進而判斷不平衡程度。控制器根據不平衡程度計算得到機頭部位電機需要提升的電機轉速大小,并輸出控制信號,提升對應電機轉速,使得無載側鏈條的張力提升,進而實現機頭和機尾部位電機的功率平衡。如果機頭部位電機電流i1小于機位部位電極電流i2時,其控制過程與上述完全相同,不再贅述。
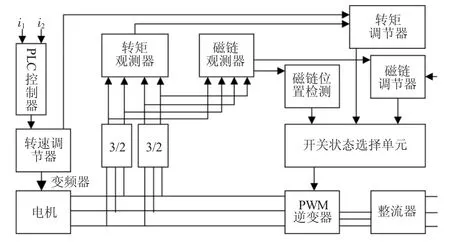
圖3 功率平衡控制系統方案框圖
4 多電機功率平衡控制系統測試分析
為驗證本文設計的刮板輸送機多電機功率平衡控制系統的可靠性和有效性,對該系統進行了模擬仿真測試分析。刮板輸送機的三部電機是系統的控制對象,首先需要對電機的電流值進行檢測,并且根據機頭和機尾部位電機電流值的比值大小判斷電機是否存在功率不平衡的問題。其次對電機轉速進行調整,使不同部位的電機功率保持平衡。本文所述刮板輸送機機頭部位有兩部電機,機尾部位只有一部電機,所以機頭和機尾部位電機功率的分配比為2∶1。以下主要測試當電機功率不平衡時,查看功率平衡控制系統能否進行自動控制,將機頭和機尾部位電機的功率調整至2∶1。
實踐經驗表明,當采煤機運動至刮板輸送機的機頭部位時,輸送機會出現顯著的電機功率不平衡問題,因此本文主要對該工況進行測試分析。經過實際測試發現該工況條件下,機頭部位電機電流為180 A,機尾部位電機電流為160 A。將機頭部位的兩部電機等效為一部電機,則認為機頭部位電機的電流值為360 A。基于已有的理論知識可知,電機負載轉矩與電流值之間存在正比例關系,由此可知機頭和機尾部位電機的負載轉矩比值為9∶4。可以看出機頭部位電機存在過載問題,需要提升機尾部位電機的轉速以降低機頭的負載轉矩。
在對電機速度進行調整前,首先需要計算得到機頭和機尾部位電機的等效轉速,經計算機頭和機尾部位電機的等效轉速分別為1 471 r/min和1 446 r/min。由于機頭部位負載相對較大,導致電機等效轉速相對較高。將上述參數輸入到模擬仿真系統中,可以得到轉速的控制信號,結果如下頁圖4所示。從圖中可以看出,機尾部位電機的電流值出現了一定程度的增加,說明其承擔的負載轉矩也增大,從而實現了機頭和機尾部位電機的功率平衡。基于以上分析可以看出,本文設計的多電機功率平衡控制系統能夠實現對不同部位電機轉速的控制,從而實現功率平衡,整體上達到了理想的效果。
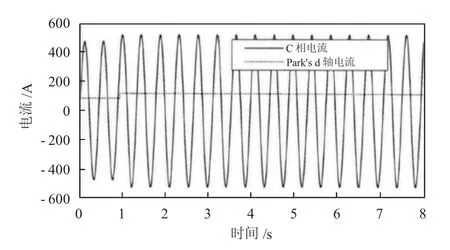
圖4 機尾部位電機電流值演變情況
猜你喜歡
消費電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(2021年3期)2021-08-13 08:39:56
防爆電機(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測控技術(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測試(2017年23期)2017-04-04 05:07:32
自動化博覽(2014年12期)2014-02-28 22:34:39
自動化博覽(2014年10期)2014-02-28 22:33:52
