全地形緊急急救車
2020-04-13 02:58:26劉丁浩任文樂
發明與創新·中學生 2020年3期
劉丁浩 任文樂
方便、靈活是汽車的優點,載重量大、耗能小是火車的優點。汽車車輪為橡膠輪胎,火車則用鋼制輪,兩者不可互換。當鐵路系統發生大型車禍需要緊急救援時,現有的急救車無法直接從公路到達現場,如果鐵路損壞又無法僅從鐵路到達。這時需要有一種車輛,它既能在鐵路上行駛,又能在公路上行駛,還能方便地實現兩種行駛方式的轉換。于是,我們產生了全地形緊急急救車的設想。
首先構造復合車輪,使之既能在公路上行駛,又能在鐵路上行駛,但如何實現公路和鐵路兩種行駛方式的轉換成為亟待解決的問題。通過實地考察、查閱資料,我們發現有些拖拉機或坦克裝有履帶,甚至能收縮升高后藏在車底,還可以伸出將車輪抬高。
能否將裝有履帶的坦克和裝有復合輪的汽車融合,使該車既能在公路、鐵路上行駛,又適用于洼地,還能利用自帶能升降的履帶實現公路和鐵路兩種行進方式的轉變?我們進行了嘗試。
一、結構設計
1.復合車輪
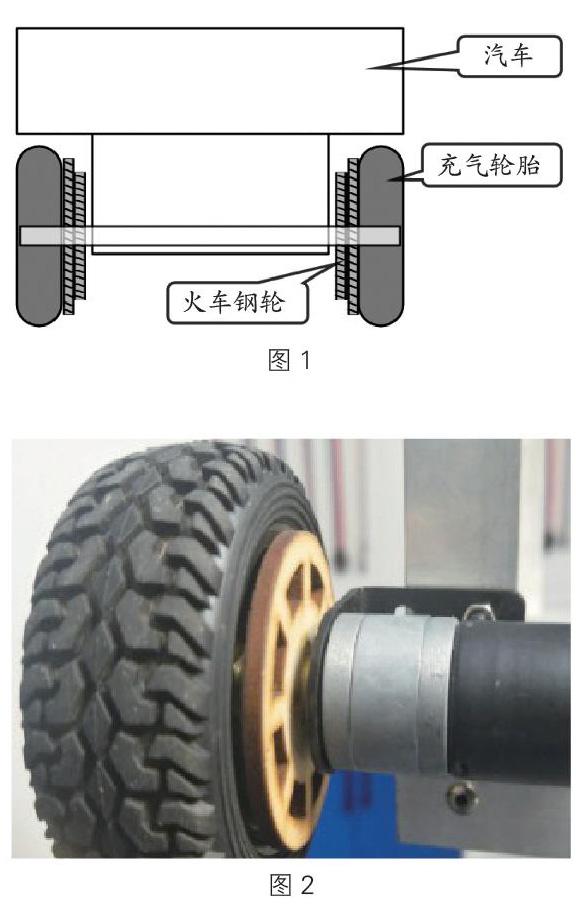
本模型的復合車輪由橡膠輪和鋼輪(由木輪代替)組成,橡膠輪與鋼輪緊貼,橡膠輪的外徑略大于鋼輪的外徑,在普通公路和高速公路上行駛時用橡膠輪著地滾動;當汽車行駛在鐵路軌道時,鋼輪緊貼鐵軌,利用鋼輪著鐵軌滾動。四個復合車輪的前兩個裝有減速電動機,為汽車行駛提供動力。如圖1、圖2所示。
2.橫行履帶
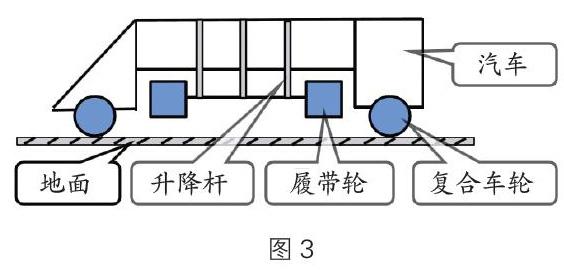
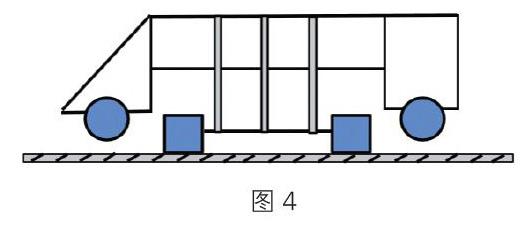
本模型前、后兩組復合車輪間裝有兩組履帶,兩組履帶上裝有電動升降桿,可根據指令上升或下降。正常前進時,復合車輪前后開動可令履帶上升收縮(如圖3所示),在需要橫向行駛時可令履帶下降,讓裝有動力的履帶左右開動(如圖4所示)。
3.履帶的構造及動力
兩組橫行履帶由一個支架緊固連接,將兩個減速電動機分別裝在兩組履帶上作為履帶橫向行駛的動力。如圖5、圖6所示。
4.履帶的上升和下降
履帶的上升和下降靠3根電動升降桿來推動(本應用4根電動升降桿,因節約成本和模型尺寸的限制,本模型用3根電動升降桿)。電動升降桿的底座和固定橫行履帶的支架緊固相連,上端與車身頂端緊固相連。如圖7、圖8所示。
5.電路總成控制系統
本模型的電路總成控制系統由六通道無線遙控發射和接收系統組成,前、后兩個按鈕可控制車輛前進、后退,上升和下降按鈕可控制橫行履帶前進、后退,左、右按鈕可控制橫行履帶像螃蟹一樣左、右橫行。
二、創新點
1.方便及時將物資運送至目的地。
2.橫行履帶爬坡性好,可作搶險車用,在公路和鐵路上又可直接行駛。
三、進一步完善
1.復合車輪只裝了動力系統而未裝轉向系統,所以只能前進或后退,而不能左轉或右轉。本模型車架用金屬三角鋁制成,由于尺寸等條件的限制,改裝轉向系統相對麻煩,故暫未改裝。
2.本模型的電路總成控制系統通道有限,兩組橫行履帶的減速電動機是并聯關系,而不是單獨使用一個通道,故兩組橫行履帶只能同時向左或向右橫行,而不能實現一個轉動、另一個不動的旋轉轉彎功能(生活中見到的挖掘機可通過控制兩組履帶的動力系統實現轉彎功能)。(指導老師:丁興東 ?聞鎮勇)
猜你喜歡
青少年科技創新報(2024年23期)2024-07-12 00:00:00
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
中國記者(2022年8期)2022-09-15 12:59:38
石油瀝青(2021年4期)2021-10-14 08:50:40
云南畫報(2021年12期)2021-03-08 00:50:54
人民交通(2019年16期)2019-12-20 07:04:10
鐵道通信信號(2018年7期)2018-08-29 01:17:04
中國公路(2017年12期)2017-02-06 03:07:33
通信電源技術(2016年4期)2016-04-04 02:58:04
工程建設與設計(2016年3期)2016-02-27 10:50:46