基于載人潛水器的海底鋪纜裝置
2020-04-17 19:04:54姚晨佼范華濤趙飛虎
艦船科學技術 2020年2期
姚晨佼,范華濤,宋 強,趙飛虎,羅 升
(中國船舶科學研究中心 深海載人裝備國家重點實驗室,江蘇 無錫 214082)
0 引 言
目前,隨著海洋觀測領域技術的迅速發展,美國、加拿大、日本、歐洲等國家均在海底觀測網絡施工建設、海底傳感器等關鍵技術方向投入巨資開展大量相關研究。1998 年以來,美國和加拿大分別建立了小型試驗觀測系統蒙特利加速研究系統(MARS)[1–2]。2011 年,MARS 為中國同濟大學深海觀測設備進行了“中國連纜觀測站試驗”[3]。2004 年,歐洲制定了歐洲海底觀測網絡(ESONET),于2007 年完成了ESONET-CA 計劃,并開始了新的歐洲多學科海底觀測網(EMOS)計劃[4]。2006 年,維多利亞海底試驗網(VENUS)由加拿大建設完成[5–6]。2009 年,西北太平洋時間序列觀測網(NEPTUNE)由加拿大建設完成[7]。2011 年,美國開始建設海洋觀測計劃(OOI)[8]。2006–2011 年,日本開展了地震海嘯密集海底網絡系統(DONET),2012-2015 年基本完成了DONET2 主干網絡的建設[9]。
目前,國內外的海底觀測網絡建設通常采用成熟的水面船儲存和布放、ROV 海底鋪設協同作業的方式[10],該方式容易受水面風浪的影響。隨著ROV、載人潛水器等水下潛器工作深度的增加及作業功能的增強,我國海洋石油的開采及海底觀測網絡建設等海洋工程正向深水發展。水下生產系統臍帶纜、海底觀測網絡等海纜作為海洋工程應用的關鍵部分,其安裝技術必將走向深水領域。本文提出了深海載人潛水器攜帶海底鋪纜裝置進行深海海底直接鋪纜的方式,通過載人潛水器在近海底航行機動、海底鋪纜裝置進行同步儲纜與放纜,從而完成海纜的直接鋪設。基于載人作業型潛器的鋪纜方式可有效避免作業時海面風浪對鋪纜過程的影響,同時降低了海纜鋪設高度,提高了海纜鋪設精度及可控性,能滿足海底監測網絡的隱蔽作業需求。
1 海底鋪纜系統
海底鋪纜裝置安裝固定在載人潛水器上,海纜存儲在海底鋪纜裝置內,其總體布置見圖1。通過載人潛水器在近海底航行機動,海底鋪纜裝置進行同步放纜。
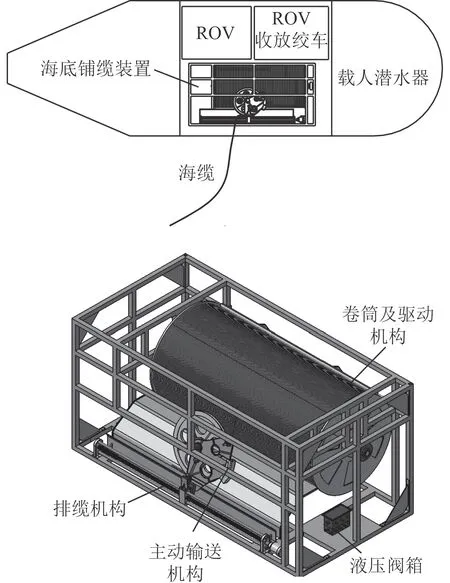
圖 1 海底鋪纜系統總體布置圖Fig. 1 Schematic of submarine cable laying system
1.1 海底鋪纜方式
目前,海底鋪纜主要采用張力鋪纜方式或余量鋪纜方式,張力鋪纜主要是通過控制海纜中張力進行鋪纜,無布放余量,海纜釋放速度與航速相同,主要適用于淺海地區。余量鋪纜主要是通過控制速度進行鋪纜,海纜鋪設余量與船速、海底地形有關,主要適用于深海地區,需根據海底地形坡度變化設計合適的鋪設余量,本文提出的利用載人潛器進行深海鋪纜宜采用余量鋪纜方式。
1.2 海底鋪纜裝置結構方案設計
鋪纜裝置由潛水器載人艙外的鋪纜裝置本體和載人艙內的控制單元組成,鋪纜裝置本體結構主要包括卷筒及驅動機構、排纜機構、主動輸送機構、排纜補償機構、濕插拔接頭主動釋放機構、應急剪切機構等。海纜鋪設時,海纜從儲纜卷筒釋放,經過排纜機構及主動輸送機構到達出纜口,海纜布放由儲纜卷筒、排纜機構、主動輸送機構、排纜補償機構協同控制。
1.2.1 排纜機構
海纜儲存在海底鋪纜裝置的儲纜卷筒上,必須設置排纜機構才能將海纜從儲纜卷筒上分層有序地釋放出去。
排纜機構主要由傳動絲杠、螺母滑塊、導向桿、輸出輪、絲杠驅動馬達等組成,排纜機構示意圖如圖2所示。傳動絲杠由絲杠驅動馬達驅動,排纜機構具有自動換向功能,根據控制指令,使螺母滑塊組件與絲杠相對移動,排纜機構與卷筒之間協調運動,以保證卷筒旋轉一圈,螺母滑塊在絲杠上運動一個海纜直徑的長度,當海纜釋放到卷筒一端時,輸出輪也到達行程端點,此時控制單元下發換向指令,使絲杠驅動馬達反轉達到換向目的,從而實現往復排纜,儲纜卷筒與排纜機構絲杠通過控制單元實現速度匹配。

圖 2 排纜機構Fig. 2 Cable arrangement mechanism
1.2.2 排纜補償機構
為防止排纜過程中海纜從排纜機構中脫落,必須使得排纜機構中海纜的入纜口始終與儲纜卷筒上的海纜直線相切,海纜始終在纜繩槽內,因此在每層海纜釋放完畢后,主動輸出輪需擺動一定角度進行補償,主要由安裝在螺母滑塊及輸出輪安裝側板上的擺動油缸實現,輸出輪在擺動油缸的帶動下,通過控制擺動油缸的伸縮行程可實現輸出輪上下擺動一定角度。
1.2.3 主動輸送機構
主動輸送機構主要由輸出輪、輸出輪馬達、壓緊機構等組成,安裝在輸出輪側板上,如圖3 所示。壓緊機構主要由第1 擺臂、第2 擺臂、擺臂馬達、連桿、彈簧、壓緊輪等組成,擺臂馬達驅動第1 擺臂,第1 擺臂和第2 擺臂頭部均設置有齒輪結構,第一擺臂通過齒輪嚙合傳動帶動第二擺臂轉動;第1 擺臂和第2 擺臂尾部均通過彈簧安裝有壓緊輪,壓緊輪壓緊海纜;輸出輪由輸出輪馬達驅動旋轉,壓緊輪與輸出輪將海纜壓緊,通過海纜與輸出輪間的摩擦力給海纜提供輸送力,同時控制輸出輪馬達轉速,使得排纜機構與卷筒之間的海纜始終保持一定的張力,從而實現有序鋪設。通過控制擺臂馬達調節第1 擺臂和第2 擺臂間的打開角度,可以適應不同直徑海纜的輸送。當海纜即將釋放完時,第1 擺臂和第2 擺臂通過嚙合傳動同時打開,從而使海纜濕插拔接頭順利通過輸送機構,最終鋪設至海底。
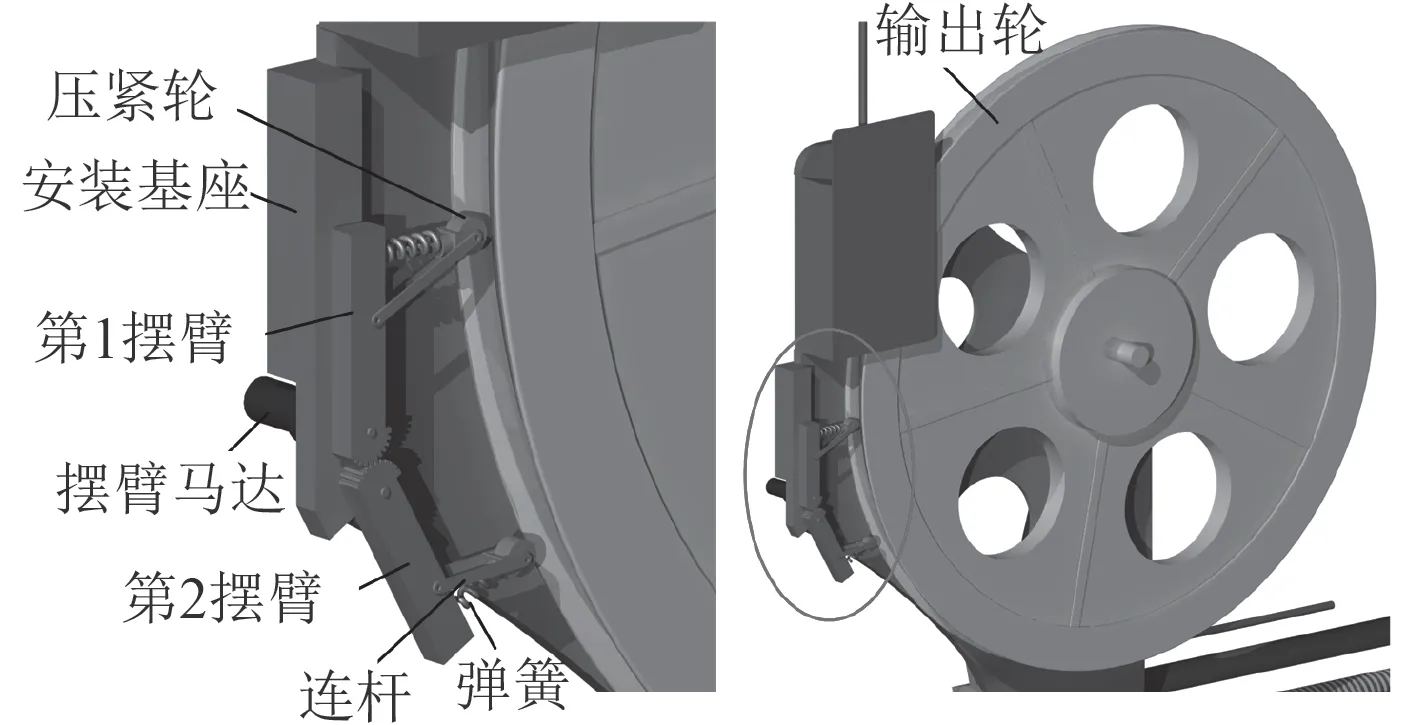
圖 3 主動輸送機構Fig. 3 Active conveying mechanism
1.2.4 應急剪切機構
應急剪切機構主要由剪切油缸及剪切刀構成,如圖4 所示。若鋪纜裝置作業過程中出現故障,無法進行正常鋪纜時,接通剪切油缸油路,液壓缸伸出帶動剪切刀移動至海纜位置,從而及時切斷海纜。

圖 4 應急剪切機構Fig. 4 Urgent cutting mechanism
1.2.5 濕插拔接頭主動釋放機構
在海纜釋放過程中,電動插銷伸出,將濕插拔接頭固定在卷筒內部,電動插銷通過卷筒上的滑環進行供電,從而實現插銷的作動。當海纜即將釋放完時,控制電動插銷收回,同時排纜機構上主動輸出模塊及時打開,從而使濕插拔接頭在卷筒轉動過程中自然滑落至海底,濕插拔接頭固定和釋放機構如圖5 所示。
2 卷筒驅動設計計算
鋪纜裝置驅動裝置需根據海纜的相關參數進行機構的驅動力矩及旋轉速度的計算。
2.1 海纜參數
作業型載人潛水器工作區域設計在水深1 000 m,定高100 m 航行,其敷設的海纜參數如下:海纜直徑d=Φ18 mm,最小彎曲半徑500 mm,長度10 km,空氣中重量m1=0.589 kg/m,海水中m2=0.328 kg/m。
2.2 卷筒排纜參數

圖 5 濕插拔接頭固定和釋放機構Fig. 5 Fixation and release mechanism of watertight connector
根據海纜最小彎曲半徑為500 mm,因此設計儲纜卷筒的直徑D 為1 200 mm,根據潛水器的安裝空間,裝置卷筒長度L 設計為3 500 mm,每層海纜卷繞圈數t 如下式:

式 中: ΔP 為 排 纜 間 隙, Δ P=0.3 mm,計 算 得 到t=191.3;d 為海纜直徑,d=18 mm。
卷筒各層容纜量Ln如下式:

式中:n 為海纜層數;D 為卷筒直徑,D=1200 mm。
經計算10 km 的海纜需排至12 層,第12 層海纜的中心距卷筒中心線的距離J 如下式:

2.3 卷筒驅動參數計算
在敷設海纜的過程中,卷筒需提供的最大扭矩主要由海纜最大張力決定,為了簡化問題計算最大張力,假設海底是平滑的,海纜為柔性的,不傳遞彎矩,計算穩態敷纜時的海纜張力分布,對海纜微段ds 進行受力分析,如圖6 所示。圖中oxy 為慣性坐標系,坐標原點o 為海纜末端與海底接觸點處,潛水器航行方向為x 軸方向,ont 為海纜局部坐標系。
微段的平衡方程如下式:

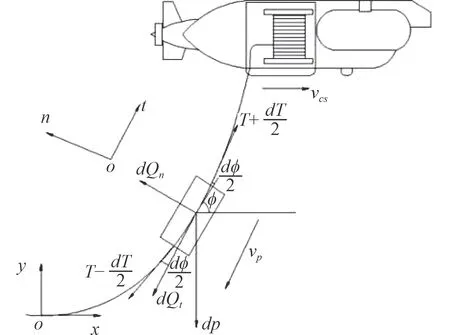
圖 6 受力分析Fig. 6 Force analysis

式中:p 為海纜水中單位長度重力,p=m2×g=3.22 N/m;T 為海纜微段中點處的張力;vp為放纜速度,vp=1 m/s;vcs為作業潛水器相對海流航行速度,vcs=0.95 m/s;vt,vv分別為海纜相對海流的切向和法向速度;dQn和dQt為微段法向和切向的流體阻力。
采取適合圓形截面纜的Pode 模型[11],則微段法向和切向的流體阻力如下式:
式中:ρ 為海水密度,ρ=1 027 kg/m3;Cn為海纜的法向阻力系數,取1.2,Ct為切向阻力系數,取0.025[12]。
整理得下式:

式中:x,y 分別為海纜x 方向和y 方向的位移。
海纜敷設選取余量敷設,認定海纜落地處張力為0,傾角為0,為避免計算出現奇異,計算時取張力為0.1N,傾角為0.1°。
邊界條件如下式:
選用4 階龍格庫塔法,通過Matlab 進行計算得到圖7 的張力分布圖。從圖中可以分析得到海纜最大張力在與潛水器連接處,最大張力T=317.1N,因此卷筒需提供的最大扭矩M 由下式計算得出:

卷筒最大轉速n 由下式計算得出:

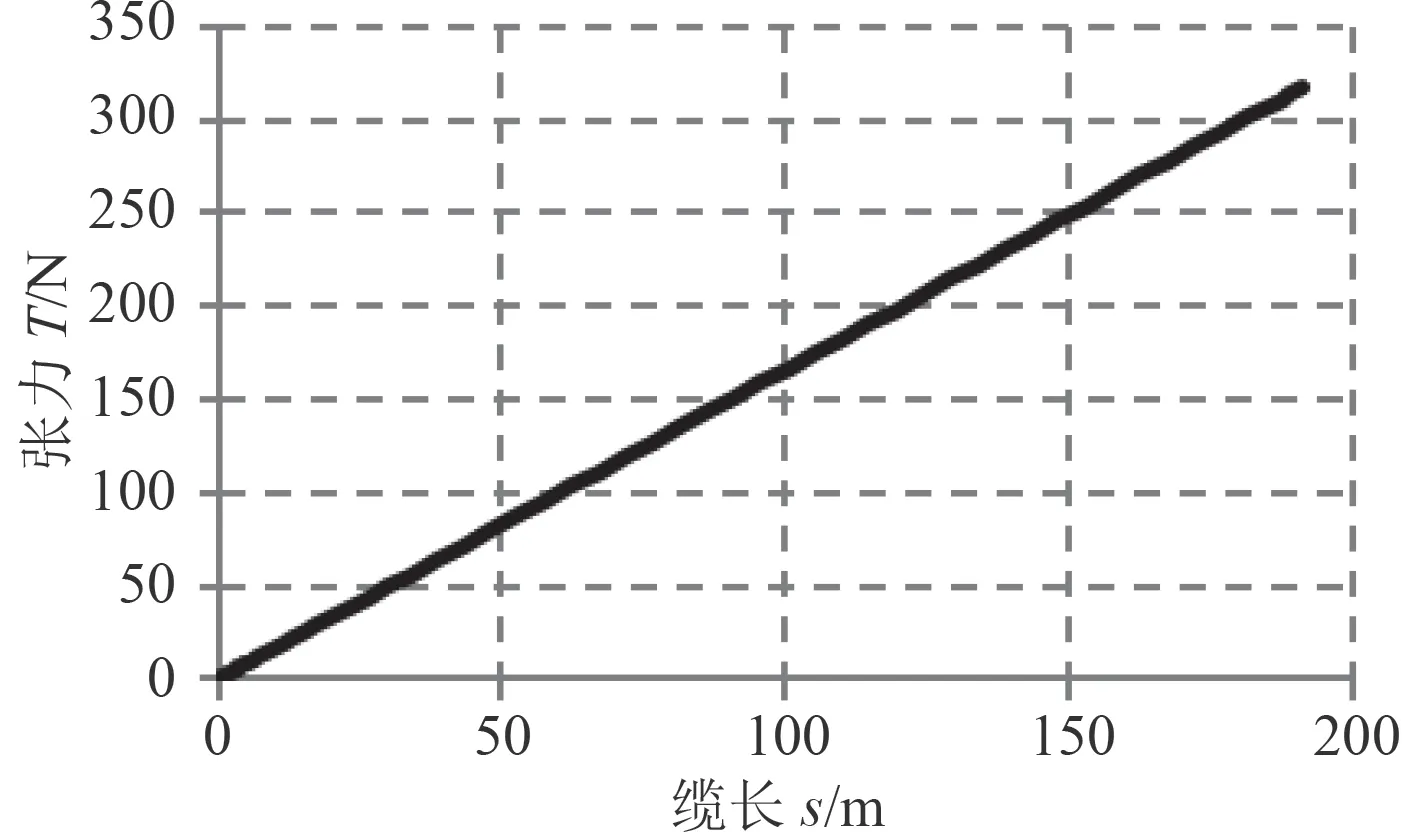
圖 7 海纜張力分布圖Fig. 7 Force distribution of cable
3 海底鋪纜裝置液壓控制系統設計
海底鋪纜裝置設置有一套液壓系統,由載人潛水器水下液壓源驅動,鋪纜裝置上安裝有液壓閥箱,將壓力補償器、本地控制器、液壓閥組等集成為一體,油液將箱體充滿。液壓控制可實現的動作有液壓馬達驅動儲纜卷筒轉動、液壓馬達驅動排纜絲杠轉動、排纜補償油缸動作、液壓馬達驅動排纜機構上主動輸出模塊的擺臂動作及驅動輸出輪轉動、液壓油缸驅動剪切刀動作,液壓原理圖如圖8 所示。
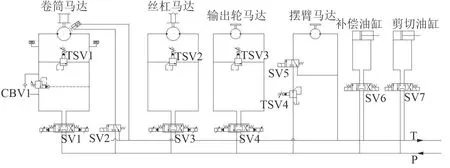
圖 8 液壓原理圖Fig. 8 Diagram of hydraulic schemtic
卷筒驅動回路用于控制卷筒的收、放、停止、制動,SV1 電磁比例換向閥控制卷筒收放動作并進行無級調速,溢流閥TSV1 用于海纜釋放時調節纜張力和回收時的張力保護,平衡閥CBV1 防止卷筒過載時失控,電磁閥SV2 控制卷筒制動。
絲杠馬達控制回路用于控制絲杠的轉動,絲杠馬達主要由電磁比例換向閥SV3 控制絲杠轉速及轉向。補償油缸控制回路用于控制輸出輪的擺動角度,主要由電磁換向閥SV6 的得電來控制補償油缸動作,并設置角度反饋。
輸出輪馬達控制回路用于控制輸出輪的動作,主要由電磁比例換向閥SV4 來控制輸出輪轉速及轉向。擺臂馬達控制回路用于控制壓緊輪壓緊或釋放動作,擺臂馬達由電磁換向閥SV5 的得電來控制壓緊輪的動作。
應急剪切控制采用剪切油缸驅動,由電磁換向閥SV7 來控制油缸動作。
海底鋪纜裝置液壓系統由可編程控制器控制液壓閥箱內的閥塊動作,達到執行指令的目的,同時可編程控制器可控制儲纜卷筒內部濕插拔接頭釋放作動器動作,以解脫濕插拔接頭。
卷筒的旋轉軸上安裝有深海編碼器,用于實時檢測卷筒旋轉圈數,可編程控制器通過將編碼器傳遞過來的檢測數據進行計算,將數據轉換為海纜釋放的實際長度及海纜在卷筒上的層數。絲杠馬達控制回路中的電磁比例換向閥與編碼器構成位置閉環控制,調節排纜機構的收纜或放纜速度。輸出輪馬達則與輸出輪液壓回路中的電磁比例換向閥構成開環控制。可編程控制器通過控制補償油缸的伸縮行程實現輸出輪上下擺動一定角度以進行輸出輪角度補償。
海底鋪纜裝置收纜、放纜和停止動作主要通過電磁比例換向閥進行切換,同時,電磁比例換向閥可用于調節儲纜卷筒的轉動速度。可編程控制器通過控制閥箱內的電磁比例換向閥,來驅動海底鋪纜裝置的絲杠馬達輸出輪馬達,完成海底鋪纜裝置的收放纜功能。
4 結 語
本文提出了深海載人潛水器攜帶海底鋪纜裝置進行深海海底直接鋪纜的方式,通過載人潛水器在近海底航行機動、海底鋪纜裝置進行同步儲纜與放纜,從而完成海纜的直接鋪設。詳細介紹了海底鋪纜裝置的原理、裝置結構組成、驅動參數計算、液壓控制系統設計,為深海水下載人潛器的作業模塊鋪纜系統的設計提供借鑒和參考。