新型階梯式淺吃水單立柱浮式風機平臺水動力分析
2020-04-21 00:57:52李懿蛟
海洋工程裝備與技術 2020年1期
李懿蛟
(上海交通大學 海洋工程國家重點實驗室,上海 200240)
0 引 言
近年來,由于化石能源的逐漸消耗和全球氣候的惡化,因此大力發展可再生能源已成為世界各國的普遍共識。海洋中的波浪能、潮汐能和風能在現階段的開發中備受矚目,其中風能的利用是最為成熟的。在過去的幾十年中,浮式風力發電機在學術界和工業界都引起了越來越廣泛的關注[1-2],相關技術得到了迅速的發展,提出了多種不同浮式平臺的概念,并且已經在世界范圍內開展了幾個示范項目。其中首批制造生產具有浮式風機平臺的包括Hywind[3]、 WindFloat[4]、 Fukushima[5],這些浮式風機正在不斷完善商業運營的體系。2017年10月,第一個海上浮式風電場Hywind Scotland并網發電,這進一步推動了浮式風機的研究。可以預見,浮式風機在不久的將來將會獲得更多的關注和快速發展。
現有的浮式風機平臺概念主要為深水海域設計。但由于電力傳輸在水深50~100米的中近海海域很方便,因此中近海海域被認為是風能利用最經濟有利的地區,同時,該海域的風速比位于深海的風電場的平均風速高出90%[6]。因此,全球風能開發已經逐漸轉移到中近海地區[7]。這種矛盾促使研究適用于中近海海域的浮式風機平臺顯得尤為重要。單立柱(Spar)、半潛式平臺和張力腿平臺是浮式平臺常用的概念。在這些概念中,Spar浮式風機平臺相對具有優勢,因為它設計簡單,重心低,水動力性能好,易于建造且適合商業化生產。
在中近海海域中,Spar浮式風機平臺應克服如下幾個挑戰。第一,海床和平臺底部之間較短的距離限制了結構可設計的范圍。近年來,通過巧妙的設計可以減小平臺的吃水,中近海水域中淺吃水Spar浮式風機平臺的可行性得到Karimirad、 Moan[8,9]和WEN[10]等人的廣泛驗證。第二,保證浮式風機系統的穩定性。與傳統的固定式風機平臺相比,浮式風機平臺的特點是空氣動力學的不穩定性更加顯著,因此在設計中需要引起更多關注。在先前的研究中,已經進行了廣泛的數值模擬,以研究平臺振動對空氣動力響應的影響[11-13]和Spar基礎的浮式風機動態響應[14-16]。為了保持功率輸出的數量和質量,淺吃水Spar浮式風機平臺應具備良好的水動力響應。由于中近海海域傳統固定式風機平臺的安裝很不經濟,因此海上風力市場需要新的解決和改進方案,以使浮式風機更具成本競爭力。盡管這還遠遠不是一個成熟的市場,但是已經設計了一些概念,例如,由Madjiad Karimirad[6]設計、建造和安裝的80 m吃水的淺吃水平臺。
為了將浮式風機應用到中近海海域,本文研究了一種新型的淺吃水浮式風機平臺。靈感來自經典Spar平臺Hywind,其出色的動態響應已通過數值和實驗測試得到了廣泛驗證。但是,SJTU(上海交通大學)設計的Stepped Short Spar for Shallow(SJTU-S4)大大降低了平臺吃水深度(目標吃水為50 m)。雖然該結構看起來像基于重力的結構,卻可以像Spar一樣工作。這使得風力發電機和平臺的組裝能夠在船廠中實施,無需額外的輔助設備來提供海上安裝的穩定性。通過避免使用昂貴的海上起重機、重型起重機或輔助船隊來節省成本。
基于三維勢流理論,使用商用軟件(HydroD)在頻域上對SJTU-S4進行基礎水動力分析。在浮式風機工作條件下,利用OrcaFlex對SJTU-S4進行時域模擬,以驗證系泊系統是否足夠安全。在SKLOE進行設計的縮尺比為1∶50的模型試驗。在試驗風場中,對NREL 5MW風力發電機和SJTU-S4進行規則波和不規則波的試驗。數值仿真和試驗結果表明,所開發的SJTU-S4在中近海海域中可以提供良好的水動力性能。
1 SJTU-S4浮式平臺設計
1.1 SJTU-S4基本結構設計
浮式風機在中近海海域逐漸得到了廣泛重視并獲得了加大力度的發展,在水深超過50 m的海域中,固定式風力發電機通常認為是不經濟的。適用于中近海海域的浮式風機平臺SJTU-S4是一種針對目標作業水深100 m,由懸鏈線式系泊系統定位,自身吃水為50 m的單立柱式浮式平臺。浮式風機平臺的設計主要考慮其固有頻率要避開海洋波浪的周期頻率和風機運行固有頻率1P、3P,以免發生共振現象,造成風機系統的損壞。同時,以縱搖角度不超過10°為標準[17],保證平臺運動姿態使得風機發電效率在有效范圍內。考慮到Spar運動性能良好,制造簡便等優點,以Hywind為基礎,改用階梯式外形,由從水平面向下三個尺寸依次增大的圓柱組成。由于目標吃水較淺,因此通過增加平臺的重量來提高其穩性是一種必然趨勢,而后調整其重心及浮心,計算其周期,達到避開海洋波浪周期的目的。SJTU-S4排水體積為17 938.035 m3,浮心位置為-31.286 m,重心位置為-34.925 m,定傾中心位置為0 m(由于平臺在小傾角下出入水體積對稱)。平臺基本結構尺寸如圖1所示,平臺具體參數如表1所示,以靜水面為參考原點,豎直向上為正。

圖1 SJTU-S4平臺基本結構尺寸Fig.1 Basic structure size of SJTU-S4 platform

表1 SJTU-S4平臺參數,λ=50
1.2 SJTU-S4系泊系統設計
該系泊系統由三根相同材質的鋼纜組成,試驗中用不銹鋼配重制成。系泊纜1沿波浪方向,從系泊纜到錨點為正方向。系泊纜2和纜3成120°夾角對稱布置。系泊半徑為500 m,纜長為520 m。如圖2所示。

圖2 系泊纜布置圖Fig.2 Mooring lines layout
作為懸鏈式系泊系統,在距水平面以下6 m處的D2=16 m的圓周上布置錨點,這種在平臺較高位置布置錨點[9]的方法,有效地減小了風傾力臂,使得平臺的運動有更好的響應,較遠位置的錨點可以通過較長的躺底段的錨鏈提供更大的恢復力。系泊系統的具體參數如表2所示。

表2 系泊系統的具體參數
在Hs=7.0 m,Tp=11.0 s,γ=2.2,流速1.0 m/s的波浪和流載荷的作用下時,纜1和纜2的應力最大值分別為2 460.17 kN和909.46 kN,其系泊系統應力大小可以滿足強度要求。針對系泊系統可以進行進一步的研究優化。
2 SJTU-S4水動力性能
為客觀評估分析SJTU-S4的水動力性能,基于Sesam和OrcaFlex進行了系統的頻域和時域仿真分析,此仿真結果為平臺設計縮比試驗以驗證其水動力性能。
2.1 勢流理論
三維勢流理論是研究Spar水動力性能的主要方法之一,也是用Sesam計算海洋結構物水動力的理論基礎。三維勢流理論可用于計算速度為零的大型浮式結構物的一階波浪載荷。當入射波與大型結構物相互作用時,波場的速度勢可分解為三個部分: 浮體的入射勢、輻射勢和繞射勢(由連接到海底的系泊纜的彈性連接產生)。假設海洋結構物附近的流體是理想的流體,即無旋、無黏和有勢,則可以將流場中的速度勢問題簡化為具有相應流體邊界條件的拉普拉斯方程:

(1)
海洋工程中采用數值方法來計算非規則結構物的流場,通常使用邊界元方法來計算規則波中大型結構物的線性波頻率響應。具體的計算過程如下: ①將結構物的濕表面分成若干個網格,以形成許多表面元素;②通過結合拉普拉斯方程和輻射勢與繞射勢的邊界條件求解表面源的強度;③對沿濕表面網格的面源強度進行積分,分別計算出輻射勢和繞射勢,從而確定流場中的速度勢。
2.2 水動力計算
基于三維勢流理論,在Sesam下研究SJTU-S4的水動力性能。主要研究該平臺在不同頻率波浪作用下產生的不同響應情況。因此在頻域分析中僅考慮波浪載荷。計算得到SJUT-S4的附加質量和阻尼如圖3所示。
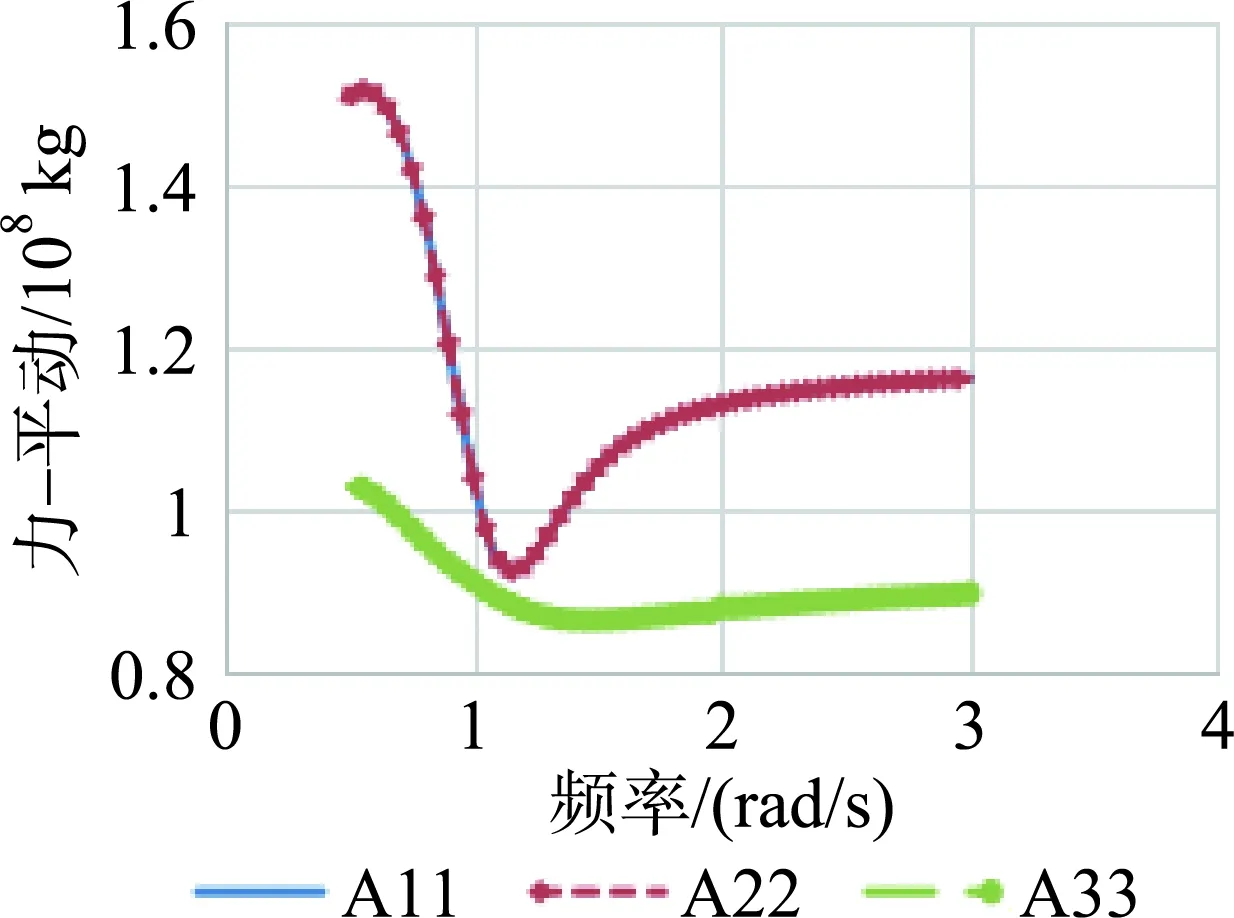
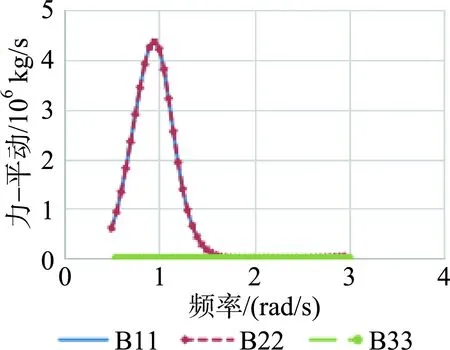
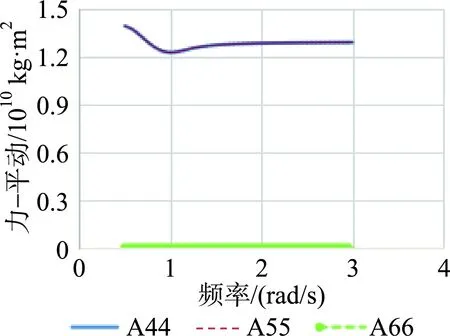



圖3 SJTU-S4水動力附加質量和阻尼
6種剛體運動的水動力附加質量矩陣和阻尼矩陣都是振蕩頻率的函數,如圖3所示。在結構物沒有速度的情況下,因為其水動力附加質量矩陣和阻尼矩陣是對稱矩陣,所以只給出了上三角矩陣元。此外,由于Spar平臺的對稱性,因此附加質量矩陣中縱蕩-縱蕩分量(A11)和橫蕩-橫蕩分量(A22)相等,橫搖-橫搖分量(A44)和縱搖-縱搖分量(A55)相等。同樣地,阻尼系數矩陣中的縱蕩-縱蕩分量(B11)和橫蕩-橫蕩分量(B22)相等,橫搖-橫搖分量(B44)與縱搖-縱搖(B55)相等,其他未顯示的矩陣元素為零。
3 SJTU-S4性能試驗驗證
3.1 水池模型試驗系統簡介
經過水動力頻域計算和在OrcaFlex中加入系泊系統的時域計算,為進一步驗證SJTU-S4的運動性能,設計縮尺比λ=50的縮比模型試驗,并在上海交通大學海洋工程國家重點實驗室(SKLOE)進行。整個系統包括S4模型平臺(SJTU-S4)、風力發電機模型、造風系統、造波機(wave generator)。通過造波機,產生指定參數的規則波或不規則波,同時在造風系統下,產生作用于葉片的風譜(定常風)。試驗中將6分力測量儀分別安裝于機艙、塔筒和平臺連接處,以測量受力和彎矩。在機艙處安裝加速度測量儀,測量三個方向的加速度。試驗為了能準確地捕捉浮式風機模型的6自由度運動,使用實驗室非接觸式6自由度運動測量儀,它可以精確地測量船舶及海洋工程結構物在風浪流作用下的6自由度運動。試驗系統在SKLDE中的布置如圖4所示。
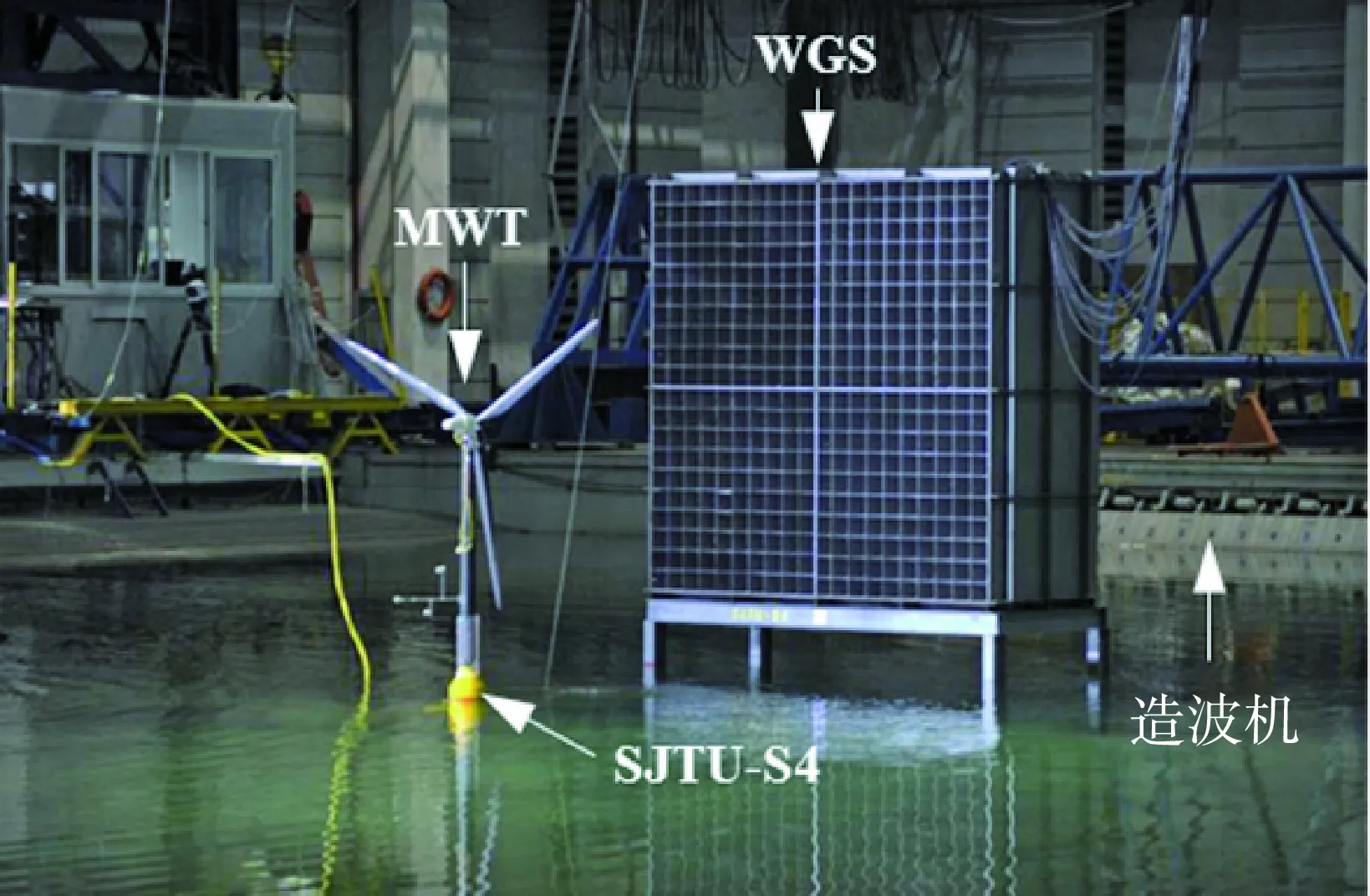

圖4 試驗系統在SKLOE中的布置Fig.4 Arrangement of test system in SKLOE
將平臺和縮尺比例為50∶1的NREL 5MW風機耦合進行規則波和不規則波試驗。試驗關注的主要參數有平臺6自由度運動、加速度、風機轉矩、錨鏈拉力等參數,并以此為判斷平臺性能的依據。該模型材料為木質,外層涂有玻璃鋼材料,錨鏈由不銹鋼配重制成,試驗水池尺寸為(長×寬)50 m×30 m,試驗水深為2 m,模型布置于水池中心處。
3.2 自由衰減試驗
平臺的衰減周期與其質量屬性有關。為了驗證模型的可靠性,數值仿真和水池試驗分別進行了衰減試驗,其結果如表3所示。

表3 數值仿真和水池試驗的衰減周期對比
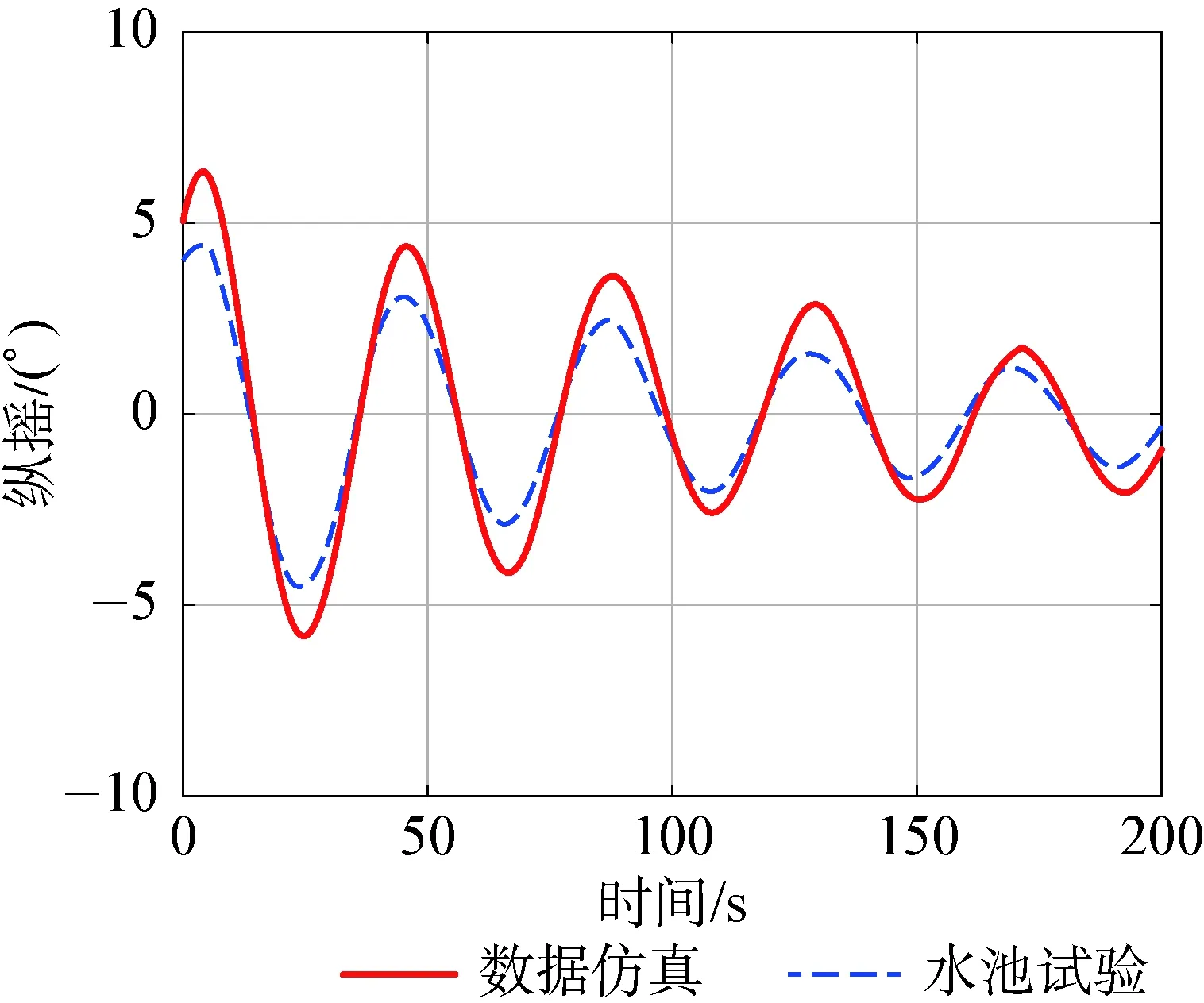
圖5 數值仿真和水池試驗縱搖衰減對比Fig.5 Numerical simulation and tank test about Pitch decay comparison
從表3可知,水池試驗和針對數值仿真的衰減試驗兩者得到的6自由度的衰減周期結果基本一致,相對誤差小于10%。從圖5中可以看出,兩者的縱搖衰減曲線也基本趨于一致。
3.3 系泊系統校驗
系泊纜的剛度曲線反映了系泊系統的恢復能力。水池試驗中試驗模型被牽引至固定位置,記錄系泊纜拉力數值。圖6顯示了系泊纜剛度曲線計算結果的比較。

圖6 系泊系統的剛度曲線比較Fig.6 Comparison of stiffness curves of mooring systems
取x正向10 m到x負向10 m測得的剛度曲線,數值仿真同試驗結果基本趨于吻合,證明該系泊系統達到了本文的設計要求。
3.4 不規則波作用下運動響應
為了更準確地刻畫該平臺的運動能力,在OrcaFlex中,對該浮式風機系統進行各種海況的時歷仿真,分析要求進行3小時的模擬以充分模擬環境條件作用下系泊系統的響應情況[19]。同樣,在水池縮比試驗中,進行相當于實尺度3小時的時歷試驗,記錄浮式風機系統所受系泊纜拉力和自身6自由度運動。本文在多種海況中選取浮式風機工作狀態下海洋環境最為惡劣的一組數據進行分析。選取有義波高Hs=7.0 m,譜峰周期Tp=11.0 s, 譜型參數γ=2.2,流速1.0 m/s的海洋環境情況和31.1 m/s風速(定常風)下進行的模型試驗結果。波浪譜如圖7所示,試驗統計值如表4和表5所示。
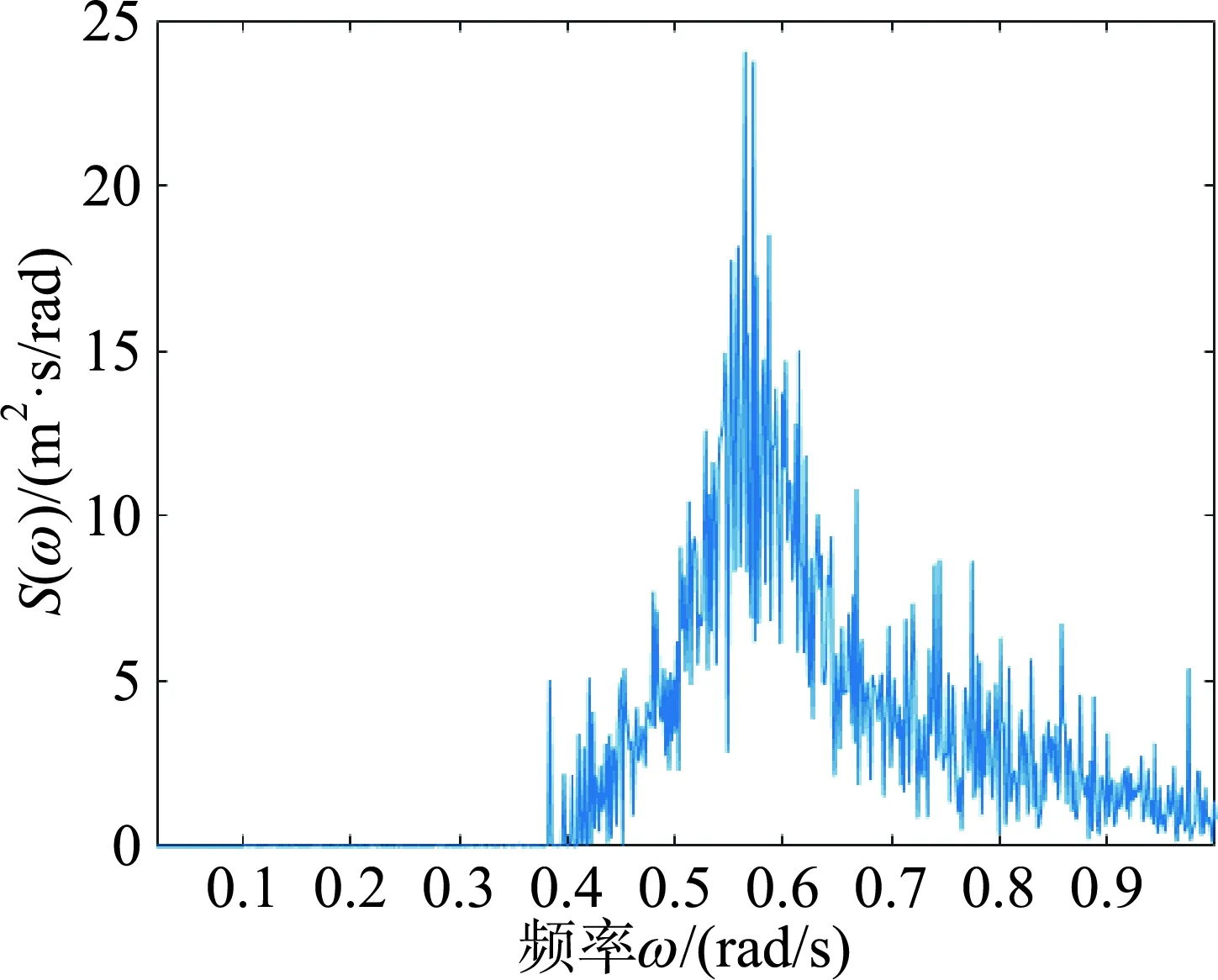
圖7 Hs=7.0 m, Tp=11.0 s, γ=2.2時的試驗波浪波譜Fig.7 Hs=7.0 m, Tp=11.0 s, γ=2.2 test wave spectrum

表4 縱蕩、垂蕩和縱搖統計值
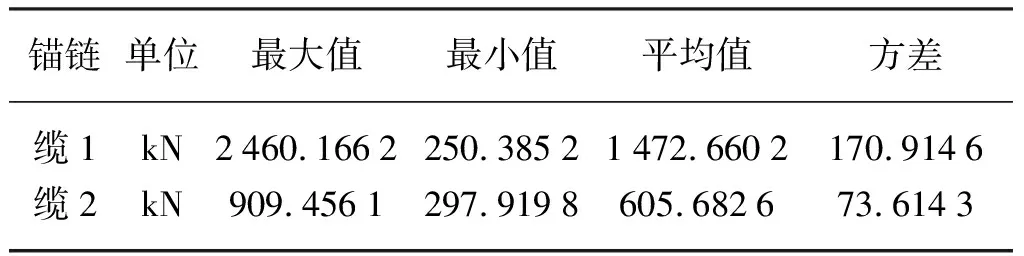
表5 錨鏈力統計值
結果選取生存海況下,在縱蕩、 垂蕩和縱搖影響風機工作的主要運動方向上的統計值,其縱蕩最大位移為11.847 m,縱搖最大俯仰角度為9.862°,小于設計要求的10°,可以認為是有效的。縱搖均值在-5.9°附近是因為試驗開始前,已經給予了浮式風機系統一個風場和流場的作用,從而產生一個初始角度。同理,垂蕩方向的運動初始也會有一個下沉的狀態,導致均值在-0.089 m附近,最大運動幅值為1.205 m。系泊纜的張力在最值和均值上都可滿足強度要求,由于纜1為迎浪纜,因此其應力波動較纜2較大,試驗結果在一定程度上反映了SJTU-S4運動時的真實情況。
通過水池試驗,得到的時歷統計值結果經過分析,在工作海況下能保持其縱搖運動的最值小于10°,在可接受范圍內,說明其水動力性能良好,可以滿足浮式風機的工作需要。
4 結 語
基于浮式平臺在中近海海域可供風力發電機工作這一原則,設計SJTU-S4和其系泊系統,對SJTU-S4執行了參數化設計。該概念在保持經典Spar優秀的耐波性下,設計包括形式、浮心、重心設計,導纜孔位置,錨鏈布置和平臺尺寸等參數,使其運動響應能滿足設計條件。基于三維勢流理論,通過Sesam的頻域仿真和OrcaFlex的時域仿真,對SJTU-S4進行了數值仿真計算驗證其可靠性。
為了進一步驗證其可靠性,本文研究團隊設計并在上海交通大學海洋工程國家重點實驗室(SKLOE)進行1∶50縮比模型水池試驗,對SJTU-S4在中國東部海域的動態響應進行了試驗評估。在風,浪和流的共存的環境載荷下,記錄了6自由度運動和系泊系統參數。
試驗結果通過統計值分析,在衰減周期、系泊系統剛度、六自由度時歷統計值、系泊纜拉力統計值上,較好地滿足了風機工作要求的條件。其最大俯仰傾角不超過10°,很好地表明了SJTU-S4具有良好的動態響應,符合海上作業的波浪情況。
為順應海上浮式風機發展的趨勢,如本文研究的應用在淺水的浮式風機平臺SJTU-S4的性能和其尺寸的參數如表1所示,它在排水量方面仍具有進一步的研究潛力。如果可以將SJTU-S4的排水量減小到一個較小的水平,它將更加經濟且具有更廣闊的應用前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17