紅外成像制導半實物仿真安裝誤差分析與修正
2020-05-07 09:28:18孫志朋趙世明孫致月
紅外技術 2020年2期
孫志朋,趙世明,孫致月
(中國人民解放軍91336部隊,河北 秦皇島 066000)
0 引言
隨著精確制導技術的迅猛發展,紅外成像制導技術的研究在軍事領域得到廣泛重視,該技術在各種對地對空對海制導武器中得到大量應用[1-3]。紅外成像制導技術是獲取目標和背景輻射的紅外能量進行成像,通過處理得到目標空間信息完成目標的識別跟蹤,是集光、機、電和信息技術于一體的綜合技術,能夠獲取較多目標特征信息,具有非常高的制導精度[4]。
紅外成像制導半實物仿真的工作原理是用系統的關鍵實物部件取代仿真系統中相應部分的數學模型,并連接到計算機仿真回路中進行試驗,可以更加真實客觀地反映系統在運行中的實際情況,提高了仿真結果的置信度[5-6]。紅外成像半實物仿真在紅外成像制導導彈導引頭的研制和性能指標驗證中起著非常重要的作用,較大程度地降低武器系統在研制過程中的成本和研制周期、提高效費比[3]。
在紅外制導導引頭半實物仿真試驗過程中,由于導引頭和紅外目標模擬器都要架設在轉臺上,很難保證導引頭光軸和紅外目標模擬器光軸完全重合,從而不可避免會引入安裝誤差。這個誤差會直接影響仿真過程中導彈的跟蹤精度和脫靶量,對仿真結果的置信度產生一定影響[6-8]。本文通過反復試驗測試分析出誤差產生的規律,然后采用圖像處理和數學分析建立誤差模型,從而判斷出誤差產生的原因,再針對誤差進行修正,避免了因誤差對整個試驗結果的負面影響。因此,對安裝誤差進行分析和修正對整個仿真實驗具有重要意義。
1 誤差分析建模
1.1 誤差產生
紅外成像半實物仿真系統由五軸轉臺、仿真計算機、控制系統和實時通訊網絡組成。其中五軸轉臺的三軸框架上架設紅外導引頭,用于模擬導彈飛行過程中的姿態運動;兩軸框架上架設紅外目標模擬器[9-10],與三軸框架隨動,為導引頭提供動態紅外場景,如圖1所示。
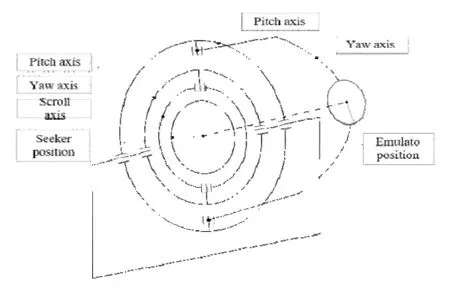
圖1 五軸轉臺示意圖Fig.1 The schematicdiagram of five-a xisturntable
導引頭和目標模擬器需要使用夾具架設在轉臺上,因夾具在設計制造中會有一定的尺寸公差[11-12],并且五軸轉臺、導引頭和目標模擬器雖是高精度產品但仍有一定的誤差量,導引頭和模擬器由于各安裝面的形位配合公差在安裝架設后其光軸之間會產生偏差[11],這些偏差包括位置偏差和角度偏差,如圖2和圖3所示,最直觀的結果是導引頭的顯示窗口中心和模擬器的像元中心不重合,從而產生制導誤差量。一般紅外成像導引頭的視場角為1°~3°,探測元數達到512×512及以上,所以這些安裝誤差的存在可能導致數個像素的差量,對制導的結果存在一定的影響,而且安裝誤差是客觀存在不能消除的,所以就需要對其進行建模分析,對制導信息進行修正。
1.2 誤差影響
因為安裝誤差,導引頭光軸和目標模擬器光軸不重合,這就使得導彈在進入末制導段開始就有制導量的誤差,一直到最后時刻存在。而且對導彈的制導精度和飛行軌跡都有一定影響。如圖4所示,導彈M和目標T,在沒有制導誤差的情況,飛行軌跡為M-T,假設因安裝誤差引起的制導誤差角度為φ,則導彈的飛行角度變為M-A-B-C-D,同時導彈落點由M點變為D點,產生一定的制導誤差量。
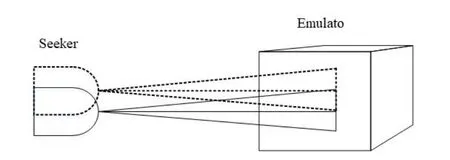
圖2 位置偏差引起的誤差圖Fig.2 Error caused by position deviation
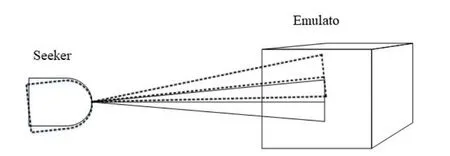
圖3 角度偏差引起的誤差圖Fig.3 Error caused by angular deviation
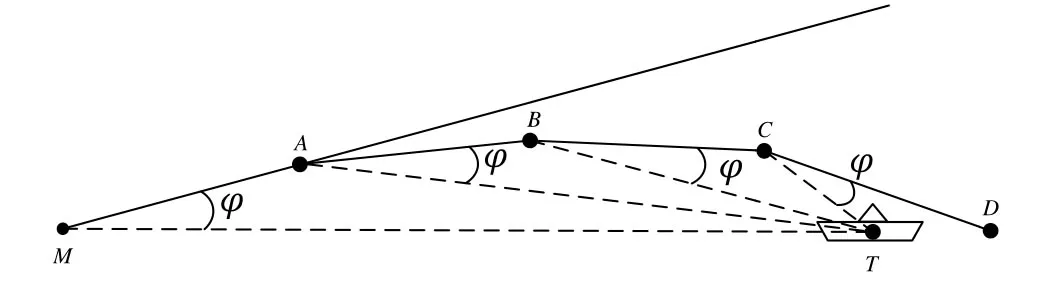
圖4 誤差對導彈制導結果的影響Fig.4 Error of missile guidance results
1.3 誤差模型建立
安裝誤差存在3種情況:一是導引頭存在安裝誤差,目標模擬器沒有安裝誤差;二是導引頭沒有安裝誤差,目標模擬器存在安裝誤差;三是導引頭和目標模擬器均存在安裝誤差。對于這3種情況,當轉動五軸轉臺的滾轉軸框使導引頭發生滾動姿態變化,其他軸框不動處于零位時,在導引頭控制機上的跟蹤界面中目標模擬器的像元中心的運動軌跡是不同的。
建立坐標系如圖5所示,基礎坐標系XOY,坐標平面垂直于三軸框架的滾轉軸,坐標原點為滾轉框的回轉中心,按導引頭偵測方向看,水平向右為X軸正向,豎直向上為Y軸正向,為靜坐標系;導引頭測量坐標系XsOsYs,以導引頭成像中心為原點(導引頭光軸上),以成像圖像為基準,橫向向右為橫軸Xs,豎向向上為縱軸Ys,為動坐標系。
在進行半實物仿真時,目標的測量值是基于導引頭測量坐標系觀測的,當導引頭進行滾轉運動時,模擬器圖像的像元中心在導引頭測量坐標系的位置也會發生相應變。設模擬器像元中心坐標為M(xm,ym),導引頭成像中心坐標Os(xOs,yOs),初始值為Os(xOs,yOs)=(rcosθ0,rsinθ0),其中r=OOs,θ0為初始狀態下OOS與OX的夾角,逆時針為正。通過坐標轉換如下式:
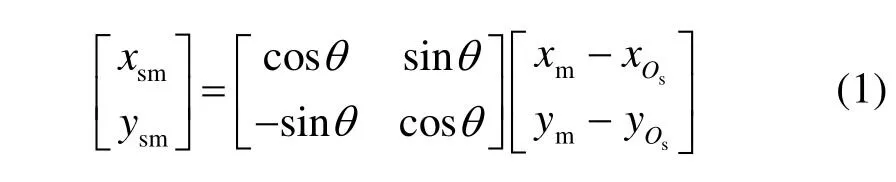
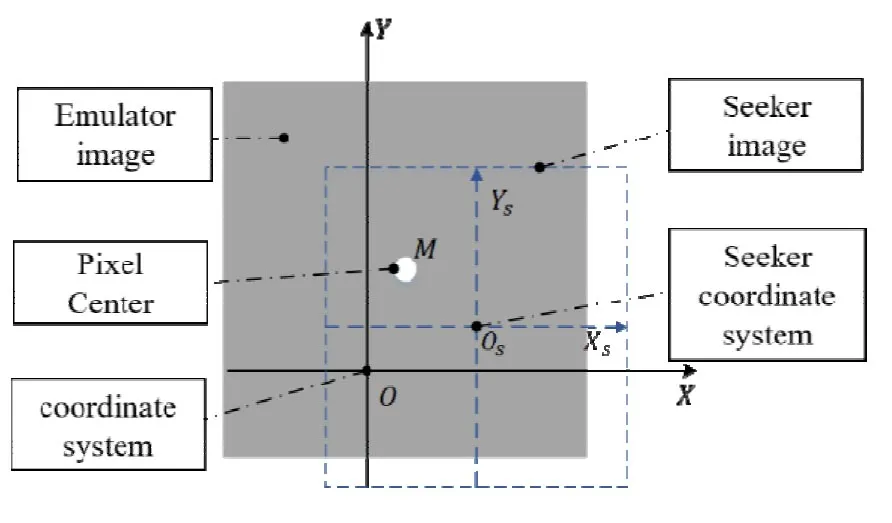
圖5 坐標系關系圖Fig.5 Coordinatesystem diagram
當導引頭滾動θ角時,導引頭成像中心坐標為Os=(rcos(θ0+θ),rsin(θ0+θ)),則模擬器像元中心在導引頭測量坐標系位置坐標為:
求得的位置坐標:
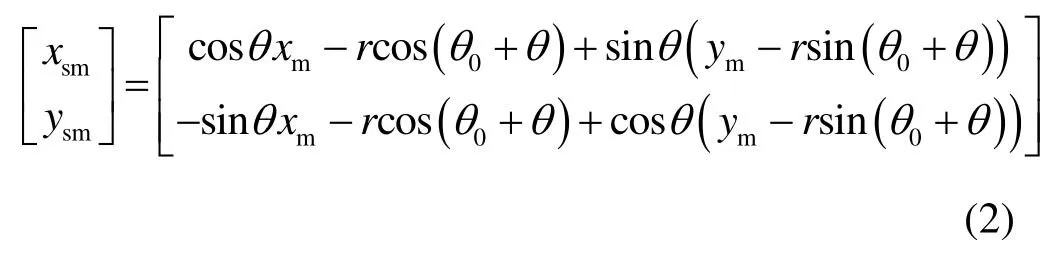
用(xOs0,yOs0)代替(rcosθ0,rsinθ0)得:
對導引頭安裝誤差做如下討論:
1)當導引頭存在安裝誤差,目標模擬器沒有安裝誤差時,此時M(xm,ym)=(0,0),將其代入式(4)得:
從式(5)可以看出隨著導引頭滾動模擬器像元中心運動軌跡是一個固定點。
2)當導引頭沒有安裝誤差,目標模擬器存在安裝誤差時,此時Os(rcosθ0,rsinθ0)=(0,0),將其代入式(4)得:

從式(6)可以看出隨著導引頭滾動模擬器像元中心運動軌跡是一個圓心在坐標原點半徑為的圓。

3)當導引頭和目標模擬器均存在安裝誤差時,隨著導引頭滾動模擬器像元中心坐標如式(4)所示,其運動軌跡是原點為半徑為的圓。
2 誤差量解算
通過轉動導引頭在測得兩個不同轉動角度下目標模擬器像元中心在導引頭測量坐標系下的坐標值的情況下代入式(2)就可對導引頭和模擬器的誤差量進行求解。假設初始狀態下模擬器像元中心在導引頭測量坐標系下的坐標值Ms0(xsm0,ysm0),在導引頭轉動90°(視滾轉框的旋轉范圍選取)的情況下模擬器像元中心的坐標值Ms1(xsm1,ysm1),代入式(4)得到聯立方程:
對方程(7)進行求解得到導引頭和目標模擬器安裝誤差的數學模型:
式(8)即是基礎坐標系下初始狀態的導引頭成像中心坐標Os(xOs,yOs)和目標模擬器像元中心坐標M(xm,ym),即安裝誤差量。
從數學模型可以看出,安裝誤差求解關鍵是獲得導引頭測量坐標系中導引頭兩個不同滾動姿態下的模擬器圖像像元中心的坐標Ms0(xsm0,ysm0)和Ms1(xsm1,ysm1),而此信息很難在導引頭的輸出接口數據中獲取。但是可以通過對導引頭輸出的探測圖像進行圖像處理獲得像元中心坐標像素。OpenCV由許多模塊組合而成,包含了許多計算機圖像的數學運算處理功能[13-14],可以通過OpenCV來實現導引頭探測圖像的處理過程。
設置模擬器使其成像的圖像如圖6所示,白點為圖像的中心,按固定速度轉動導引頭,錄制θ角由0~2π導引頭探測圖像的視頻,對導引頭旋轉一個周期內視頻進行處理,其中某一幀圖像進行目標檢測[15]獲得像元中心的形心坐標,處理結果如圖7所示。
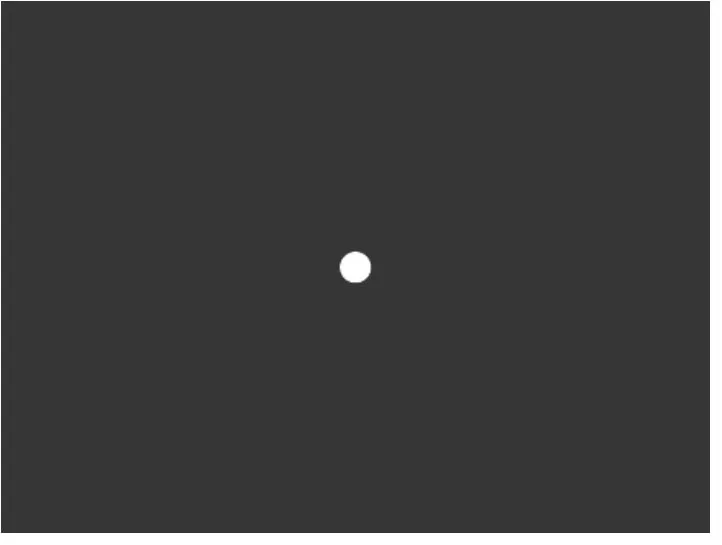
圖6 目標模擬器成像圖像Fig.6 Target simulator image
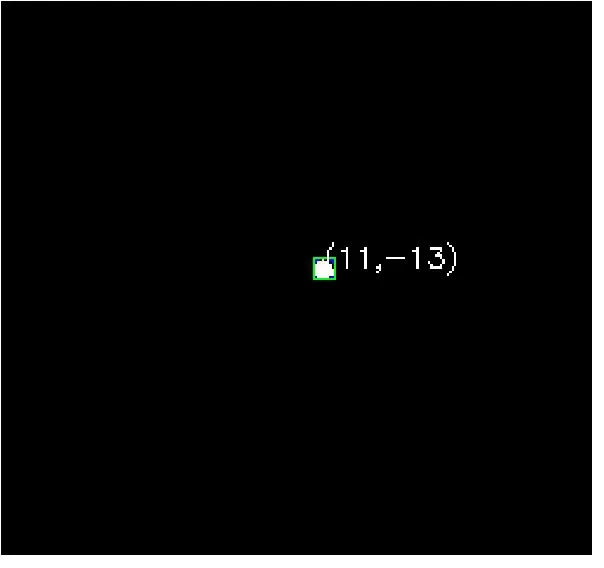
圖7 導引頭目標處理檢測結果Fig.7 Seeker target processingdetection results
在程序中將每一幀圖像處理后的坐標值輸出到TXT文本,然后用Matlab調用進行畫圖如圖8所示,根據圖像對照公式(3)~(5)就可以判斷出是哪種誤差情況。選取θ=0°和θ=90°下的坐標值代入式(8),便可以求出導引頭和目標模擬器的安裝誤差。
3 誤差補償
對誤差的補償本文主要提出兩種思路:一是根據求解的誤差量,轉動轉臺相應的軸框,使模擬器像元中心和導引頭成像中心重合,修改轉臺控制程序,將此狀態下的各軸的位置修正為零位。這種方法可以適用于飛行過程中滾動姿態變化很小的彈(如巡航彈),滾動姿態變化大的彈則不適用,另外修改控制程序需要制作轉臺的專業人員進行,存在客觀的局限性,且反復修正不利于轉臺的技術狀態穩定。

圖8 模擬器像元中心的運動軌跡 Fig.8 Motion traceof thesimulator imagecenter
二是將求解的誤差量及不同滾動的角度加載到導引頭輸出接口的制導量中,在模型中添加補償量φx、φy,以達到對整個制導彈道進行修正。
φx、φy的求解公式為:
式中:(xms,yms)為彈體某滾動角度下導引頭觀測坐標系下的模擬器像元中心的坐標;m、n導引頭像元數;FOV為導引頭的視場角。這種方法是在導引頭輸出制導量中加入了補償模型,可實現對導引頭制導信息的修正,對硬件的穩定性影響不大,其缺點是只是數學模型上的修正,導引頭和模擬器的光軸位置關系沒有變化,也就是模擬器成像中心和導引頭觀測窗口中心依然沒有重合問題依舊存在,但從誤差修正前后脫靶量的對照中可以看出制導精度有所提高。
采用第2種方法進行修正后對脫靶量的影響如圖9所示,圖中坐標分別是脫靶量在x向和z向的分量。
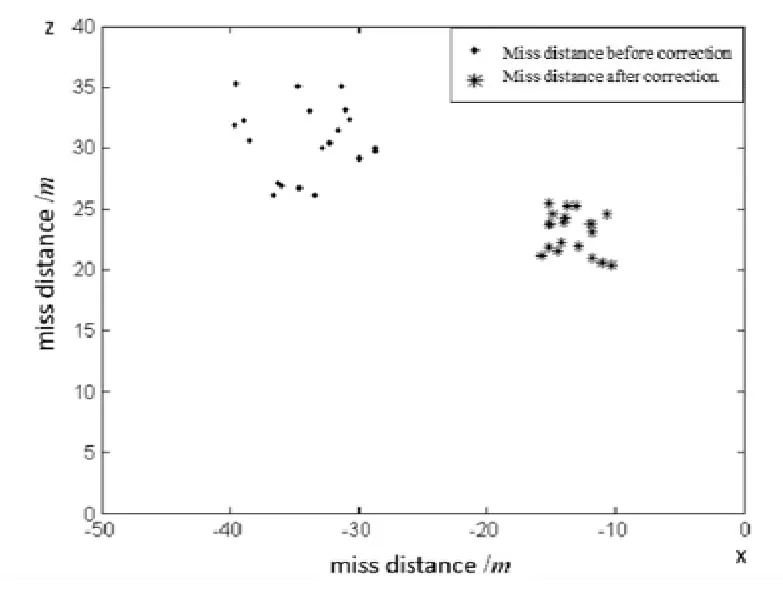
圖9 修正前后脫靶量統計圖Fig.9 Statistics of missed amount beforeand after correction
4 結論
通過對紅外制導半實物仿真中出現的誤差進行了產生的原因分析,并建立了誤差的數學模型及判斷3種安裝誤差的方法,并進行推導得到了計算導引頭和目標模擬器安裝誤差的公式,然后應用OpenCV圖像處理工具對導引頭圖像進行處理得到誤差量并提出了誤差補償方法,最后將誤差量代入彈道模型進行驗證,通過對實驗前后脫靶量的統計對比表明此誤差修正對仿真中提高制導精度有一定的優化作用。
