移動(dòng)閉塞條件下基于雙曲列控策略的發(fā)車(chē)間隔時(shí)間計(jì)算
2020-05-11 11:43:41陳澤君潘登汪鐳梅萌袁德強(qiáng)
微型電腦應(yīng)用 2020年1期
陳澤君 潘登 汪鐳 梅萌 袁德強(qiáng)
摘 要: 列車(chē)間隔時(shí)間關(guān)乎鐵路行車(chē)安全和效率。對(duì)未來(lái)鐵路移動(dòng)閉塞系統(tǒng)發(fā)車(chē)間隔時(shí)間的科學(xué)計(jì)算進(jìn)行探討,引入了能夠反映經(jīng)驗(yàn)豐富司機(jī)駕車(chē)列車(chē)優(yōu)化行為的基于雙曲函數(shù)的列車(chē)行為控制模型;然后,討論了列車(chē)分段運(yùn)動(dòng)方程和車(chē)站發(fā)車(chē)作業(yè)、進(jìn)路解鎖等環(huán)節(jié),以及各種誤差因素,并將它們與基于雙曲函數(shù)的列車(chē)行為控制模型有機(jī)結(jié)合起來(lái),建立了計(jì)算移動(dòng)閉塞條件下車(chē)站發(fā)車(chē)間隔時(shí)間的數(shù)學(xué)模型,給出了兩種不同情形的車(chē)站發(fā)車(chē)間隔時(shí)間計(jì)算方法,數(shù)值仿真試驗(yàn)驗(yàn)證了算法的有效性和可行性。對(duì)移動(dòng)閉塞條件下車(chē)站發(fā)車(chē)環(huán)節(jié)的列車(chē)行為控制和行車(chē)組織有較大參考價(jià)值。
關(guān)鍵詞: 移動(dòng)閉塞系統(tǒng); 發(fā)車(chē)間隔時(shí)間; 雙曲函數(shù); 仿真優(yōu)化; 算法
中圖分類(lèi)號(hào): TP311 ? ? ?文獻(xiàn)標(biāo)志碼: A
Analysis and Calculation of Time Interval between Two Trains in
Railway Station under Moving Automatic Block
CHEN Zejun1, PAN Deng1, WANG Lei1, MEI Meng1, YUAN Deqiang2
Abstract: Train interval is closely related to the safety and efficiency of railway traffic. Discussions are made on the scientific calculation of the time interval of two successive trains departing the same station in the same direction under the future railway moving block system, and the train behavior control model based on the hyperbolic function is introduced to describe the optimal behavior of the train steering by the experienced driver. Then, we discuss the timepiecewise train motion equation, and the links such as station departure operation and the automatic unlocking of train route, as well as various errorcaused factors, and combine them with the train control model based on the hyperbolic function, establish a mathematical model to calculate the time interval of two successive trains departing the same station in the same direction under moving block system, and present the algorithms of the departure interval of two successive trains under two different situations. Numerical simulations verify the effectiveness and feasibility of two algorithms. There are great reference values in train control and organization when the train(s) departing the station under moving block system.
Key words: Moving block system; Train departing interval; Hyperbolic function; Simulation optimization; Algorithms
0 引言
目前,我國(guó)鐵路在線運(yùn)用的先進(jìn)列控技術(shù),與歐洲、日本一樣,均屬于準(zhǔn)移動(dòng)閉塞系統(tǒng)(QuasiMoving Block System)的范疇,按照歐洲、日本和我國(guó)制定的列控技術(shù)發(fā)展戰(zhàn)略,更安全、高效的移動(dòng)閉塞系統(tǒng)(Moving Block System)將會(huì)隨著精確定位導(dǎo)航技術(shù)的成熟運(yùn)用而取代準(zhǔn)移動(dòng)閉塞系統(tǒng)。未來(lái)移動(dòng)閉塞條件下,如何精確標(biāo)定列車(chē)間隔時(shí)間,將關(guān)系到列車(chē)運(yùn)行的安全性和車(chē)站的行車(chē)組織效率,是移動(dòng)閉塞系統(tǒng)的先進(jìn)性和優(yōu)越性能否充分發(fā)揮作用的至關(guān)重要的因素之一。而列車(chē)間隔時(shí)間,除應(yīng)根據(jù)列車(chē)區(qū)間追蹤運(yùn)行的條件進(jìn)行計(jì)算外,還應(yīng)根據(jù)追蹤運(yùn)行的兩列車(chē)同方向到達(dá)、同方向發(fā)車(chē)及同方向通過(guò)三種條件進(jìn)行計(jì)算,然后取其中最大者作為最終確定的追蹤列車(chē)間隔時(shí)間I[1],即式(1)。I=max{I追,I到,I發(fā),I通}
(1)式中:I追—按兩列車(chē)在區(qū)間內(nèi)追蹤運(yùn)行條件計(jì)算的追蹤列車(chē)間隔時(shí)間;
I到—按兩列車(chē)到站停車(chē)條件計(jì)算的追蹤列車(chē)間隔時(shí)間;
I發(fā)—按兩列車(chē)從車(chē)站出發(fā)條件計(jì)算的追蹤列車(chē)間隔時(shí)間;
I通—按兩列車(chē)不停車(chē)通過(guò)車(chē)站條件計(jì)算的追蹤列車(chē)間隔時(shí)間。
針對(duì)具體線路,對(duì)上述列車(chē)間隔時(shí)間參數(shù)進(jìn)行分析與計(jì)算,確定安全、合理的列車(chē)間隔時(shí)間,可以為列車(chē)運(yùn)行的科學(xué)控制和車(chē)站高效行車(chē)組織提供依據(jù)。當(dāng)前軌道交通領(lǐng)域主要采用平均速度或平均減速度[2]來(lái)計(jì)算列車(chē)間隔時(shí)間,無(wú)法反映列車(chē)出站、進(jìn)站等情形下的變速運(yùn)行過(guò)程,計(jì)算誤差較大,不利于運(yùn)輸組織和列車(chē)運(yùn)行的挖潛提效[3],為此學(xué)術(shù)界進(jìn)行了列車(chē)運(yùn)行過(guò)程細(xì)化[4]、列車(chē)間隔自適應(yīng)調(diào)整[5]等諸多嘗試,取得了較好的效果。但是,列車(chē)運(yùn)行過(guò)程細(xì)化與安全、高效、平穩(wěn)的列控策略結(jié)合得不夠緊密,因而在列車(chē)間隔時(shí)間計(jì)算的精確度上尚存在進(jìn)一步提升的空間;而列車(chē)間隔自適應(yīng)調(diào)整只有建立在科學(xué)的列車(chē)間隔時(shí)空參數(shù)標(biāo)準(zhǔn)的基礎(chǔ)上,才能取得更好的控制效果。另一方面,我國(guó)幅員遼闊、人口眾多,運(yùn)力不足、運(yùn)能緊張的局面還將持續(xù)很長(zhǎng)一段時(shí)間,壓縮列車(chē)間隔時(shí)間仍然是未來(lái)我國(guó)軌道交通領(lǐng)域提升運(yùn)輸能力的根本性措施[6, 7],這對(duì)列車(chē)間隔時(shí)間的精確計(jì)算提出了更為嚴(yán)格的需求。
限于問(wèn)題的復(fù)雜性和研究的階段性,本文僅就移動(dòng)閉塞系統(tǒng)發(fā)車(chē)間隔時(shí)間進(jìn)行討論,旨在發(fā)現(xiàn)合理確定發(fā)車(chē)間隔時(shí)間的計(jì)算方法,為實(shí)現(xiàn)未來(lái)鐵路移動(dòng)閉塞系統(tǒng)發(fā)車(chē)條件下列車(chē)行為控制和車(chē)站行車(chē)組織提供理論基礎(chǔ)。
1 移動(dòng)閉塞條件下車(chē)站發(fā)車(chē)間隔時(shí)間
移動(dòng)閉塞條件下發(fā)車(chē)間隔時(shí)間應(yīng)滿足以下條件。
(1)列車(chē)追蹤運(yùn)行過(guò)程的安全性
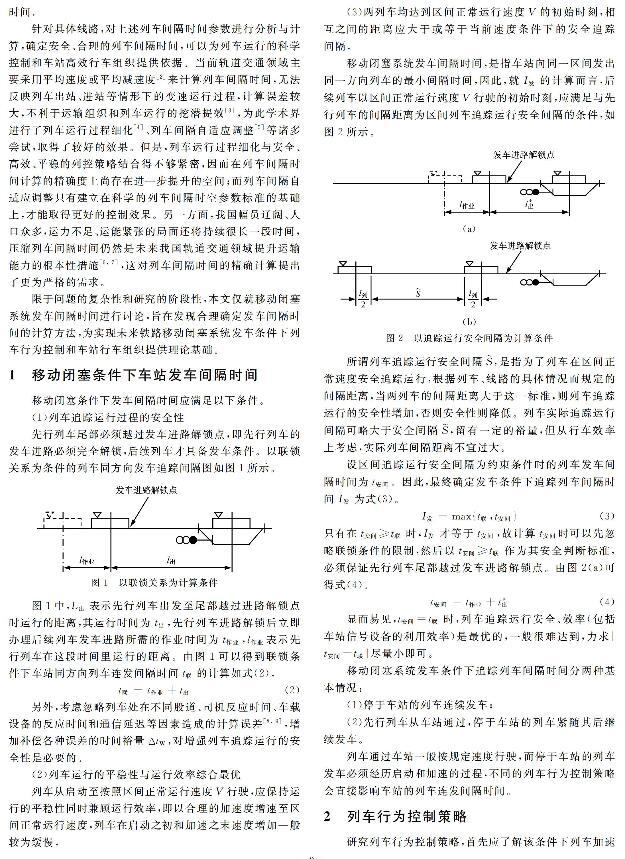
先行列車(chē)尾部必須越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn),即先行列車(chē)的發(fā)車(chē)進(jìn)路必須完全解鎖,后續(xù)列車(chē)才具備發(fā)車(chē)條件。以聯(lián)鎖關(guān)系為條件的列車(chē)同方向發(fā)車(chē)追蹤間隔圖如圖1所示。
圖1中,L出表示先行列車(chē)出發(fā)至尾部越過(guò)進(jìn)路解鎖點(diǎn)時(shí)運(yùn)行的距離,其運(yùn)行時(shí)間為t出,先行列車(chē)進(jìn)路解鎖后立即辦理后續(xù)列車(chē)發(fā)車(chē)進(jìn)路所需的作業(yè)時(shí)間為t作業(yè),l作業(yè)表示先行列車(chē)在這段時(shí)間里運(yùn)行的距離。由圖1可以得到聯(lián)鎖條件下車(chē)站同方向列車(chē)連發(fā)間隔時(shí)間t聯(lián)的計(jì)算如式(2)。t聯(lián)=t作業(yè)+t出
(2) ?另外,考慮忽略列車(chē)處在不同股道、司機(jī)反應(yīng)時(shí)間、車(chē)載設(shè)備的反應(yīng)時(shí)間和通信延遲等因素造成的計(jì)算誤差[8, 9],增加補(bǔ)償各種誤差的時(shí)間裕量ΔtW,對(duì)增強(qiáng)列車(chē)追蹤運(yùn)行的安全性是必要的。
(2)列車(chē)運(yùn)行的平穩(wěn)性與運(yùn)行效率綜合最優(yōu)
列車(chē)從啟動(dòng)至按照區(qū)間正常運(yùn)行速度V行駛,應(yīng)保持運(yùn)行的平穩(wěn)性同時(shí)兼顧運(yùn)行效率,即以合理的加速度增速至區(qū)間正常運(yùn)行速度,列車(chē)在啟動(dòng)之初和加速之末速度增加一般較為緩慢。
(3)兩列車(chē)均達(dá)到區(qū)間正常運(yùn)行速度V的初始時(shí)刻,相互之間的距離應(yīng)大于或等于當(dāng)前速度條件下的安全追蹤間隔。
移動(dòng)閉塞系統(tǒng)發(fā)車(chē)間隔時(shí)間,是指車(chē)站向同一區(qū)間發(fā)出同一方向列車(chē)的最小間隔時(shí)間,因此,就I發(fā)的計(jì)算而言,后續(xù)列車(chē)以區(qū)間正常運(yùn)行速度V行駛的初始時(shí)刻,應(yīng)滿足與先行列車(chē)的間隔距離為區(qū)間列車(chē)追蹤運(yùn)行安全間隔的條件,如圖2所示。
(a)
(b)
所謂列車(chē)追蹤運(yùn)行安全間隔,是指為了列車(chē)在區(qū)間正常速度安全追蹤運(yùn)行,根據(jù)列車(chē)、線路的具體情況而規(guī)定的間隔距離,當(dāng)兩列車(chē)的間隔距離大于這一標(biāo)準(zhǔn),則列車(chē)追蹤運(yùn)行的安全性增加,否則安全性則降低。列車(chē)實(shí)際追蹤運(yùn)行間隔可略大于安全間隔,留有一定的裕量,但從行車(chē)效率上考慮,實(shí)際列車(chē)間隔距離不宜過(guò)大。
設(shè)區(qū)間追蹤運(yùn)行安全間隔為約束條件時(shí)的列車(chē)發(fā)車(chē)間隔時(shí)間為t安間。因此,最終確定發(fā)車(chē)條件下追蹤列車(chē)間隔時(shí)間I發(fā)為式(3)。I發(fā)=max{t聯(lián),t安間}
(3)只有在t安間≥t聯(lián)時(shí),I發(fā)才等于t安間,故計(jì)算t安間時(shí)可以先忽略聯(lián)鎖條件的限制,然后以t安間≥t聯(lián)作為其安全判斷標(biāo)準(zhǔn),必須保證先行列車(chē)尾部越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn)。由圖2(a)可得式(4)。t安間=t作業(yè)+t出
(4) ?顯而易見(jiàn),t安間=t聯(lián)時(shí),列車(chē)追蹤運(yùn)行安全、效率(包括車(chē)站信號(hào)設(shè)備的利用效率)是最優(yōu)的,一般很難達(dá)到,力求|t安間-t聯(lián)|盡量小即可。
移動(dòng)閉塞系統(tǒng)發(fā)車(chē)條件下追蹤列車(chē)間隔時(shí)間分兩種基本情況:
(1)停于車(chē)站的列車(chē)連續(xù)發(fā)車(chē);
(2)先行列車(chē)從車(chē)站通過(guò),停于車(chē)站的列車(chē)緊隨其后繼續(xù)發(fā)車(chē)。
列車(chē)通過(guò)車(chē)站一般按規(guī)定速度行駛,而停于車(chē)站的列車(chē)發(fā)車(chē)必須經(jīng)歷啟動(dòng)和加速的過(guò)程,不同的列車(chē)行為控制策略會(huì)直接影響車(chē)站的列車(chē)連發(fā)間隔時(shí)間。
2 列車(chē)行為控制策略
研究列車(chē)行為控制策略,首先應(yīng)了解該條件下列車(chē)加速運(yùn)行規(guī)律。
2.1 列車(chē)加速運(yùn)行規(guī)律
列車(chē)由啟動(dòng)至以區(qū)間正常速度行駛,經(jīng)歷了由慢到快的加速過(guò)程。由牛頓力學(xué)可知,加速度(或單位合力)在列車(chē)增速過(guò)程起著至關(guān)重要的作用,直接影響了列車(chē)運(yùn)行效率和平穩(wěn)程度。一般來(lái)說(shuō),除緊急情況制動(dòng)停車(chē)外,列車(chē)在改變自身行為時(shí)一般應(yīng)保持運(yùn)行的平穩(wěn)性,即在發(fā)車(chē)條件下的增速過(guò)程中,列車(chē)啟動(dòng)之初和加速之末速度增加較為緩慢。
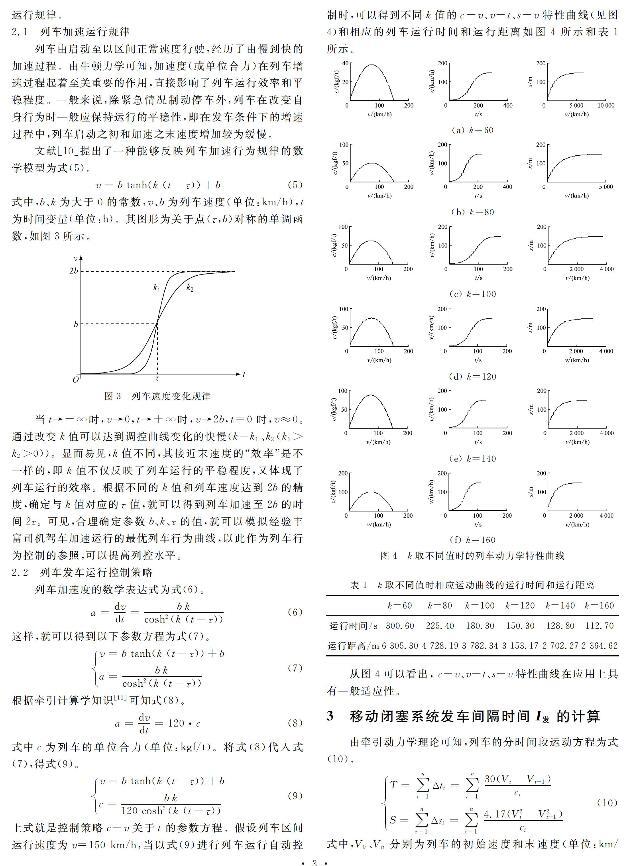
文獻(xiàn)[10]提出了一種能夠反映列車(chē)加速行為規(guī)律的數(shù)學(xué)模型為式(5)。v=b tanh(k (t-τ))+b
(5)式中,b、k為大于0的常數(shù),v、b為列車(chē)速度(單位:km/h),t為時(shí)間變量(單位:h)。其圖形為關(guān)于點(diǎn)(τ,b)對(duì)稱(chēng)的單調(diào)函數(shù),如圖3所示。
當(dāng)t→-∞時(shí),v→0,t→+∞時(shí),v→2b,t=0時(shí),v≈0。通過(guò)改變k值可以達(dá)到調(diào)控曲線變化的快慢(k=k1、k2(k1>k2>0))。顯而易見(jiàn),k值不同,其接近末速度的“效率”是不一樣的,即k值不僅反映了列車(chē)運(yùn)行的平穩(wěn)程度,又體現(xiàn)了列車(chē)運(yùn)行的效率。根據(jù)不同的k值和列車(chē)速度達(dá)到2b的精度,確定與k值對(duì)應(yīng)的τ值,就可以得到列車(chē)加速至2b的時(shí)間2τ。可見(jiàn),合理確定參數(shù)b、k、τ的值,就可以模擬經(jīng)驗(yàn)豐富司機(jī)駕車(chē)加速運(yùn)行的最優(yōu)列車(chē)行為曲線,以此作為列車(chē)行為控制的參照,可以提高列控水平。
2.2 列車(chē)發(fā)車(chē)運(yùn)行控制策略
列車(chē)加速度的數(shù)學(xué)表達(dá)式為式(6)。a=dvdt=b kcosh2(k (t-τ))
(6)這樣,就可以得到以下參數(shù)方程為式(7)。v=b tanh(k (t-τ))+b
a=b kcosh2(k (t-τ))
(7)根據(jù)牽引計(jì)算學(xué)知識(shí)[11]可知式(8)。a=dvdt=120·c
(8)式中c為列車(chē)的單位合力(單位:kgf/t)。將式(8)代入式(7),得式(9)。v=b tanh(k (t-τ))+b
c=b k120 cosh2(k (t-τ))
(9)上式就是控制策略c-v關(guān)于t的參數(shù)方程。假設(shè)列車(chē)區(qū)間運(yùn)行速度為v=150 km/h,當(dāng)以式(9)進(jìn)行列車(chē)運(yùn)行自動(dòng)控制時(shí),可以得到不同k值的c-v、v-t、s-v特性曲線(見(jiàn)圖4)和相應(yīng)的列車(chē)運(yùn)行時(shí)間和運(yùn)行距離如圖4所示和表1所示。
(a) k=60
(b) k=80
(c) k=100
(d) k=120
(e) k=140
(f) k=160
從圖4可以看出, c-v、v-t、s-v特性曲線在應(yīng)用上具有一般適應(yīng)性。
3 移動(dòng)閉塞系統(tǒng)發(fā)車(chē)間隔時(shí)間I發(fā)的計(jì)算
由牽引動(dòng)力學(xué)理論可知,列車(chē)的分時(shí)間段運(yùn)動(dòng)方程為式(10)。T=∑ni=1Δti=∑ni=130(Vi-Vi-1)ci
S=∑ni=1Δsi=∑ni=14.17(V2i-V2i-1)ci
(10)式中,V0、Vn分別為列車(chē)的初始速度和末速度(單位:km/h)。將V0~Vn劃分為n段,Vi-1和Vi分別表示列車(chē)在第i-1和i段的平均速度,V0=0、Vn=V。通過(guò)式(10)即可求得相應(yīng)速度間隔內(nèi)的運(yùn)行時(shí)間和運(yùn)行距離。
假設(shè)停于車(chē)站的列車(chē)連續(xù)發(fā)車(chē)間隔時(shí)間為t1安間、先行列車(chē)通過(guò)車(chē)站時(shí)車(chē)站繼續(xù)發(fā)車(chē)情況下的間隔時(shí)間為t2安間。
3.1 停于車(chē)站的列車(chē)連續(xù)發(fā)車(chē)情況下t1安間的計(jì)算
停于車(chē)站的前車(chē)Train1和后車(chē)Train2連續(xù)發(fā)車(chē)的情況如圖5所示。
(a) Train2在Train1啟動(dòng)運(yùn)行t1安間時(shí)間后啟動(dòng)
(b) Train1和Train2運(yùn)行T(2)時(shí)間后形成安全車(chē)距
Train1、Train2均達(dá)到規(guī)定運(yùn)行速度V(km/h)的初始時(shí)刻,相互之間的距離為追蹤運(yùn)行安全間隔(單位:m),Train1的列車(chē)長(zhǎng)度為l(單位:m)。
Train1啟動(dòng)運(yùn)行t1安間時(shí)間,速度達(dá)到V,此時(shí)Train2啟動(dòng)。Train1、Train2追蹤運(yùn)行,經(jīng)T(2)時(shí)間,Train2速度達(dá)到V,與Train1的距離為追蹤運(yùn)行安全間隔,而Train1在T(2)時(shí)間內(nèi)經(jīng)過(guò)兩個(gè)階段,在ΔT1時(shí)間速度達(dá)到V,在ΔT2時(shí)間內(nèi)以速度V勻速行駛。
車(chē)站發(fā)車(chē)是由車(chē)站辦理發(fā)車(chē)作業(yè)、列車(chē)根據(jù)車(chē)站指示(信號(hào))啟動(dòng)運(yùn)行并駛出車(chē)站的一個(gè)過(guò)程。故在分析計(jì)算車(chē)站連續(xù)發(fā)車(chē)間隔時(shí)間時(shí)可以忽略這部分時(shí)間。Train1啟動(dòng)至速度達(dá)到V時(shí)的運(yùn)動(dòng)方程為式(11)。T(1)=∑ni=130(Vi-Vi-1)c(1)i
S(1)=∑ni=14.17(V2i-V2i-1)c(1)i
(11)式中,速度范圍被均勻劃分為n段,V0=0、Vn=V。將Train2的速度范圍作同樣劃分,則Train2啟動(dòng)至速度達(dá)到V時(shí)的運(yùn)動(dòng)方程為式(12)。T(2)=∑ni=130(Vi-Vi-1)c(2)i
S(2)=∑ni=14.17(V2i-V2i-1)c(2)i
(12)由圖5可知式(13)—式(15)。
T(1)=t1安間+ΔT1
(13)
T(2)=ΔT1+ΔT2
(14)
+=S(1)-S(2)+V·ΔT23.6
(15)
由式(13)、(14)、(15)可得間隔時(shí)間t1安間為式(16)。t1安間=T(1)-T(2)+3.6(+l-S(1)+S(2))V
(16)此即為移動(dòng)閉塞條件下ΔT0的數(shù)學(xué)模型。可以發(fā)現(xiàn),此種情況下的發(fā)車(chē)間隔時(shí)間與先行列車(chē)、后續(xù)列車(chē)行為參數(shù)具有密切相關(guān)性。
3.2 先行列車(chē)通過(guò)時(shí)車(chē)站繼續(xù)發(fā)車(chē)情況下t2安間的計(jì)算
Train1以V勻速運(yùn)行,T(1)=0。這種情況下,Train2啟動(dòng)至速度達(dá)到V時(shí)的運(yùn)動(dòng)方程與式(12)相同。不難得到式(17)。+l=V3.6(t2安間+T(2))-S(2)
(17)進(jìn)一步有式(18)。t2安間=3.6(+l+S(2))V-T(2)
(18)可以看出,t2安間的計(jì)算同樣與前、后列車(chē)的行為參數(shù)密切相關(guān)。
4 算法步驟
下面從安全、效率和平穩(wěn)性方面討論移動(dòng)閉塞系統(tǒng)發(fā)車(chē)條件下追蹤列車(chē)間隔時(shí)間的算法步驟。首先,假設(shè)列車(chē)尾部越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn)時(shí)列車(chē)頭部距發(fā)車(chē)點(diǎn)的距離為SJ。由圖1可以知,SJ=L出+l,其中為T(mén)rain1的列車(chē)長(zhǎng)度。
4.1 停于車(chē)站的列車(chē)連續(xù)發(fā)車(chē)情況
Step1:數(shù)據(jù)初始化。
Step2:根據(jù)控制策略c-v的參數(shù)方程,計(jì)算不同k值條件下的列車(chē)動(dòng)力學(xué)特性(見(jiàn)圖4、表1)。
Step3:將T(1)、T(2)、S(1)、S(2)、、l、V代入式(16),計(jì)算不同k值條件下的t1安間。
Step4:計(jì)算t1出(=t1安間-t作業(yè))(t1出即式(4)中的t出,以區(qū)別于4.2節(jié)中的t2出)。
Step5:根據(jù)不同k值條件下的v-t、s-v曲線方程,計(jì)算t1出時(shí)刻的運(yùn)行距離S1出。
Step6:S1出-SJ≥0?是,則保留該控制策略;否,則舍棄該策略;若全部被舍棄,則轉(zhuǎn)Step8。該步驟為安全性檢查,即檢查列車(chē)尾部是否已越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn)。
Step7:對(duì)保留下來(lái)的所有控制策略,進(jìn)行平穩(wěn)性和效率的綜合評(píng)定,確定最佳的間隔時(shí)間t1安間。
Step8:計(jì)算t1聯(lián)。方法為:根據(jù)s-v曲線計(jì)算與SJ對(duì)應(yīng)的VJ,再根據(jù)v-t曲線計(jì)算與VJ對(duì)應(yīng)的tJ,tJ即為式(1)的t出,然后代入式(1)即得。
Step9:考慮各種計(jì)算誤差[3, 4],增加補(bǔ)償各種誤差的時(shí)間裕量ΔtW,故停于車(chē)站的列車(chē)連續(xù)發(fā)車(chē)情況下,I1發(fā)=max{t1聯(lián),t1安間}+ΔtW。
算法流程圖如圖6所示。
間隔時(shí)間的算法流程
4.2 先行列車(chē)通過(guò)時(shí)車(chē)站繼續(xù)發(fā)車(chē)情況
Step1:數(shù)據(jù)初始化。
Step2:根據(jù)控制策略c-v的參數(shù)方程,計(jì)算不同k值條件下的列車(chē)動(dòng)力學(xué)特性(見(jiàn)圖4、表1)。
Step3:將T(2)、S(2)、、l、V代入式(18),計(jì)算不同k值條件下的t2安間。
Step4:計(jì)算t2出(=t2安間-t作業(yè))(t2出即式(4)中的t出,以區(qū)別于4.1節(jié)中的t1出)。
Step5:根據(jù)不同k值條件下的v-t、s-v曲線方程,計(jì)算 t2出時(shí)刻的運(yùn)行距離S2出。
Step6:S2出-SJ≥0?是,則保留該控制策略;否,則舍棄該策略;若全部被舍棄,則轉(zhuǎn)Step8。該步驟為安全性檢查,即檢查列車(chē)尾部是否已越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn)。
Step7:對(duì)保留下來(lái)的所有控制策略,進(jìn)行平穩(wěn)性和效率的綜合評(píng)定,確定最佳的間隔時(shí)間t2安間。
Step8:計(jì)算t2聯(lián)。方法為:根據(jù)s-v曲線計(jì)算與SJ對(duì)應(yīng)的VJ,再根據(jù)v-t曲線計(jì)算與VJ對(duì)應(yīng)的tJ,tJ即為式(1)的t出,然后代入式(1)即得。
Step9:考慮各種計(jì)算誤差[3, 4],增加補(bǔ)償各種誤差的時(shí)間裕量ΔtW,故停于車(chē)站的列車(chē)連續(xù)發(fā)車(chē)情況下,連發(fā)間隔時(shí)間為I2發(fā)=max{t2聯(lián),t2安間}+ΔtW。
算法流程圖如圖7所示。
列車(chē)間隔時(shí)間的算法流程
5 仿真優(yōu)化
Train1、Train2的列車(chē)度均為850 m(=l),區(qū)間運(yùn)行速度V=150 km/h,追蹤運(yùn)行安全間隔為4 500 m,發(fā)車(chē)進(jìn)路解鎖點(diǎn)的距發(fā)車(chē)點(diǎn)的距離L出=1 300 m,SJ=L出+l=2 150 m,消除各種誤差的時(shí)間裕量ΔtW=30 s,t作業(yè)=10 s,且列車(chē)的最大單位合力滿足要求。列車(chē)牽引計(jì)算的時(shí)間步長(zhǎng)為50 ms。
5.1 停于車(chē)站的列車(chē)連續(xù)發(fā)車(chē)情況
不失一般性,假設(shè)前后兩列列車(chē)的牽引能力相當(dāng),采取相同的c-v控制曲線,則式(16)可以簡(jiǎn)化為式(19)。t1安間=3.6(+l)V
(19) ?前后兩列列車(chē)盡量采取相同c-v控制曲線,既有助于列車(chē)運(yùn)行的自動(dòng)控制,也有利于降低行車(chē)組織的復(fù)雜程度。將、l、V代入式(19),得t1安間=128.40 s,進(jìn)一步有t1出=118.4 s。按照算法步驟計(jì)算不同k值條件下其他參數(shù),結(jié)果如表2所示。
當(dāng)k=60、80、100、120時(shí),由于先行列車(chē)尾部在t1出時(shí)間內(nèi)無(wú)法越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn),從安全考慮取I1發(fā)=t1聯(lián)+ΔtW;而當(dāng)k=140、160時(shí),Train1尾部在t1出時(shí)間內(nèi)能夠越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn),從列車(chē)區(qū)間安全高效運(yùn)行考慮取I1發(fā)=t1安間+ΔtW。
5.2 先行列車(chē)通過(guò)時(shí)車(chē)站繼續(xù)發(fā)車(chē)情況
按照算法步驟進(jìn)行計(jì)算,相關(guān)數(shù)據(jù)間如表3所示。
當(dāng)k=60時(shí),t2出、t2安間為負(fù)值,與Train1為先行列車(chē)矛盾;當(dāng)k=80、100、120時(shí),由于先行列車(chē)尾部在t2出時(shí)間內(nèi)無(wú)法越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn),從安全考慮取I2發(fā)=t2聯(lián)+ΔtW;而當(dāng)k=140、160時(shí),Train1尾部在t2出時(shí)間內(nèi)能夠越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn),從列車(chē)區(qū)間安全高效運(yùn)行考慮取I2發(fā)=t2安間+ΔtW。
綜合上述兩種情況的分析與計(jì)算,結(jié)合圖4的動(dòng)力學(xué)特性曲線,不難確定安全性、平穩(wěn)性和行車(chē)效率等方面綜合最優(yōu)的控制方式。同時(shí)可以發(fā)現(xiàn)以下規(guī)律:
(1)移動(dòng)閉塞系統(tǒng)發(fā)車(chē)條件下追蹤列車(chē)間隔時(shí)間與列車(chē)c-V控制曲線密切相關(guān),涉及列車(chē)性能與線路狀況等因素。
(2)當(dāng)后續(xù)追蹤列車(chē)速度達(dá)到150 km/h的初始時(shí)刻:k=60、80、100、120時(shí),列車(chē)之間的距離大于區(qū)間列車(chē)安全追蹤間隔,安全性增加了,行車(chē)效率因之下降;k=140、160時(shí),列車(chē)之間的距離等于區(qū)間列車(chē)安全追蹤間隔,在保證列車(chē)行車(chē)安全的情況下行車(chē)效率較前一種情況有所提高。
(3)k=140、160時(shí),若列車(chē)越過(guò)發(fā)車(chē)進(jìn)路解鎖點(diǎn)立即辦理繼續(xù)發(fā)車(chē)業(yè)務(wù),會(huì)造成列車(chē)在區(qū)間的間隔距離小于安全間隔,安全性下降。因此,建議鐵路移動(dòng)閉塞系統(tǒng)在車(chē)站聯(lián)鎖條件中根據(jù)不同的c-v曲線,增加與之相應(yīng)的“發(fā)車(chē)間隔時(shí)間”聯(lián)鎖條件。
6 總結(jié)
移動(dòng)閉塞條件下車(chē)站發(fā)車(chē)間隔時(shí)間,不僅是車(chē)站行車(chē)組織的重要基礎(chǔ)參數(shù)之一,同時(shí)也是列車(chē)出站行為控制的重要依據(jù)。計(jì)算移動(dòng)閉塞條件下車(chē)站發(fā)車(chē)間隔時(shí)間,必須考慮車(chē)站辦理發(fā)車(chē)作業(yè)、進(jìn)路解鎖和列車(chē)出站的行為過(guò)程等諸多因素,當(dāng)前軌道交通領(lǐng)域車(chē)站接、發(fā)車(chē)作業(yè)列車(chē)行為多采用平均速度或平均減速度來(lái)計(jì)算,誤差較大,為此引入了基于雙曲函數(shù)的列車(chē)行為控制策略,能夠反映經(jīng)驗(yàn)豐富司機(jī)駕車(chē)變速運(yùn)行過(guò)程中加速度變化的規(guī)律,從而可以通過(guò)仿真確定最佳的列車(chē)行為曲線,為精確標(biāo)定移動(dòng)閉塞條件下車(chē)站的發(fā)車(chē)間隔時(shí)間奠定基礎(chǔ)。由于移動(dòng)閉塞系統(tǒng)車(chē)站發(fā)車(chē)間隔時(shí)間的確定過(guò)程,將列控與車(chē)站行車(chē)組織緊密的結(jié)合在一起,體現(xiàn)了移動(dòng)閉塞條件下列車(chē)的智能化和主體性不斷增強(qiáng)的技術(shù)需求,以及列控與行車(chē)組織一體化程度大幅提高的發(fā)展趨勢(shì),對(duì)提升車(chē)站發(fā)車(chē)環(huán)節(jié)的列控水平和行車(chē)效率,將起到有力的推動(dòng)作用。未來(lái)課題組將繼續(xù)關(guān)注列車(chē)同方向到達(dá)間隔時(shí)間I到、同方向通過(guò)間隔時(shí)間I通和列車(chē)區(qū)間追蹤間隔時(shí)間I追,重點(diǎn)在研究移動(dòng)閉塞系統(tǒng)列車(chē)間隔時(shí)間的通用計(jì)算方法,并將基于雙曲函數(shù)的列控策略用于列車(chē)行為的控制與優(yōu)化,這對(duì)增強(qiáng)未來(lái)鐵路移動(dòng)閉塞條件下列車(chē)控制與行車(chē)組織的一體化程度,提高路網(wǎng)安全行車(chē)效率具有重要意義。
參考文獻(xiàn)
[1] 徐瑞華, 張國(guó)寶, 徐行方. 軌道交通系統(tǒng)行車(chē)組織[M]. 北京: 中國(guó)鐵道出版社, 2005.
[2] 劉瀾, 魏德勇, 殷原, 等. 客運(yùn)專(zhuān)線列車(chē)速度間隔控制機(jī)理與計(jì)算[J]. 西南交通大學(xué)學(xué)報(bào), 2006 (5): 575581.
[3] Fanghua WEI, Qian WU, Lan LIU. Simulating Calculation and Optimization Design of the Tracing Time Interval of Trains in Aiminterval Control Mode[J]. Journal of Transportation Systems Engineering and Information Technology, 2007, 7(3): 105110.
[4] 侯黎明,孫鵬飛,聶英杰,等.高速鐵路追蹤間隔分析與優(yōu)化設(shè)計(jì)研究[J].鐵道運(yùn)輸與經(jīng)濟(jì),2018,40(6):511.
[5] Jing Xun, Jiateng Yin, Ronghui Liu, et al. Cooperative control of highspeed trains for headway regulation: A selftriggered model predictive control based approach[J]. Transportation Research (Part C), Emerging Technologies, 2019(102):106120.
[6] 聶英杰, 胡志垚. 京滬高速鐵路北京南站發(fā)車(chē)追蹤間隔研究[J]. 鐵道運(yùn)輸與經(jīng)濟(jì), 2018, 40(11): 2831.
[7] 鄭云水, 高生霖, 束展逸. 高速鐵路列車(chē)追蹤間隔時(shí)間優(yōu)化研究[J]. 測(cè)控技術(shù), 2019, 38(6): 120125.
[8] 潘登, 鄭應(yīng)平. 基于雙曲函數(shù)的車(chē)輛變速行為控制策略[J]. 機(jī)車(chē)電傳動(dòng), 2008 (3): 4548.
[9] 鈕澤全. 牽引計(jì)算學(xué)[M]. 北京:中國(guó)鐵道出版社,1985.
[10] 張妍瑩, 祝陶美, 王濤. CBTC系統(tǒng)列車(chē)運(yùn)行間隔控制仿真研究[J]. 鐵道通信信號(hào), 2018, 54(10): 5761.
[11] 湯永, 李輝, 張濤. 基于閉塞時(shí)間模型的列車(chē)追蹤間隔時(shí)間研究[J]. 機(jī)車(chē)電傳動(dòng), 2016(5): 5558.
(收稿日期: 2019.10.29)
基金項(xiàng)目:國(guó)家重點(diǎn)研發(fā)計(jì)劃資助(2017YFB120110508);科技部重點(diǎn)研發(fā)項(xiàng)目課題(2018YFF03005005)
作者簡(jiǎn)介:陳澤君(1995),男,杭州人,碩士研究生,研究方向:智能軌道交通系統(tǒng)。
汪鐳(1970),男,無(wú)錫人,博士,教授,研究方向:人工智能與進(jìn)化計(jì)算。
梅萌(1978),男,黃梅人,博士,講師,研究方向:鐵路車(chē)站計(jì)算機(jī)聯(lián)鎖。
袁德強(qiáng)(1977),男,雙城人,碩士,高級(jí)工程師,研究方向:列車(chē)運(yùn)行控制。
通信作者:潘登(1969),男,懷遠(yuǎn)人,博士,副教授,研究方向:智能自動(dòng)化理論及應(yīng)用,先進(jìn)列控技術(shù)。文章編號(hào):1007757X(2020)01000106
