海域多要素感知觀測與預警關鍵技術
2020-05-13 14:10:38林化琛鄭佳春黃一琦孫世丹曹長玉
航海 2020年2期
林化琛 鄭佳春 黃一琦 孫世丹 曹長玉
摘要:本文介紹了一種海域多要素感知觀測與預警系統。該系統主要由雷達網、光電觀察設備、AIS、GPS、綜合信息處理平臺等組成。以先進雷達技術、大數據和人工智能為支撐,實現對海面目標實時態勢跟蹤和海洋環境實時監測,綜合感知和立體觀測預警分析。文中介紹了基于非恒定自適應門限的目標全自動探測、雷達組網全目標融合、基于經驗正交分解的X-BAND雷達海浪探測、基于雷達視頻處理的溢油探測與報警等關鍵技術;給出了系統在福建省海洋漁業、海警、海事等部門成功應用案例,證明了該系統技術的可行性、先進性,極具應用推廣價值。
關鍵詞:雷達;AIS;綜合感知;數據融合;海浪探測
O引 言
黨的十八大提出了建設海洋強國的重大部署。習近平總書記曾指出,建設海洋強國是中國特色社會主義事業的重要組成部分,要進一步堅持創新、協調、綠色、開放、共享的新發展理念,樹立海洋經濟全球布局觀,主動適應并引領海洋經濟發展新常態,加快供給側結構性改革,著力優化海洋經濟區域布局,提升海洋產業結構和層次,提高海洋科技創新能力。《福建省“十三五”海洋經濟發展專項規劃》提出了運用“互聯網+”思維指導海洋信息化工作,綜合應用通信技術、計算機技術、物聯網技術、云技術等,構建融合海域使用動態化管理、海洋工程環境監管、漁船信息化管理、安全生產監管、養殖區域及水質監控、海洋漁業生產狀況及經濟數據收集、應急事項處置于一體的“智慧海洋”平臺,實現智能感知、智能調度、智能決策、智能服務,形成與海洋現代化管理相適應的智慧海洋體系[1]。基于海洋觀測、海洋漁業、海洋執法等業務需求, “海域多要素感知觀測與預警系統”應運而生,該系統通過對海面目標實時態勢的跟蹤觀測和海洋環境實時監測,綜合感知分析與預測處理,實現海域海面的“透明化”和“智能化”;可為海洋漁業、海警、海事等部門海上執法及事故調查等提供關鍵信息支撐,可賦能智能漁業、智能執法、智能搜救、海洋環境服務等新業態,對國家海洋信息化戰略的實現具有重大意義,具有廣泛的應用前景。
1 系統的組成及功能
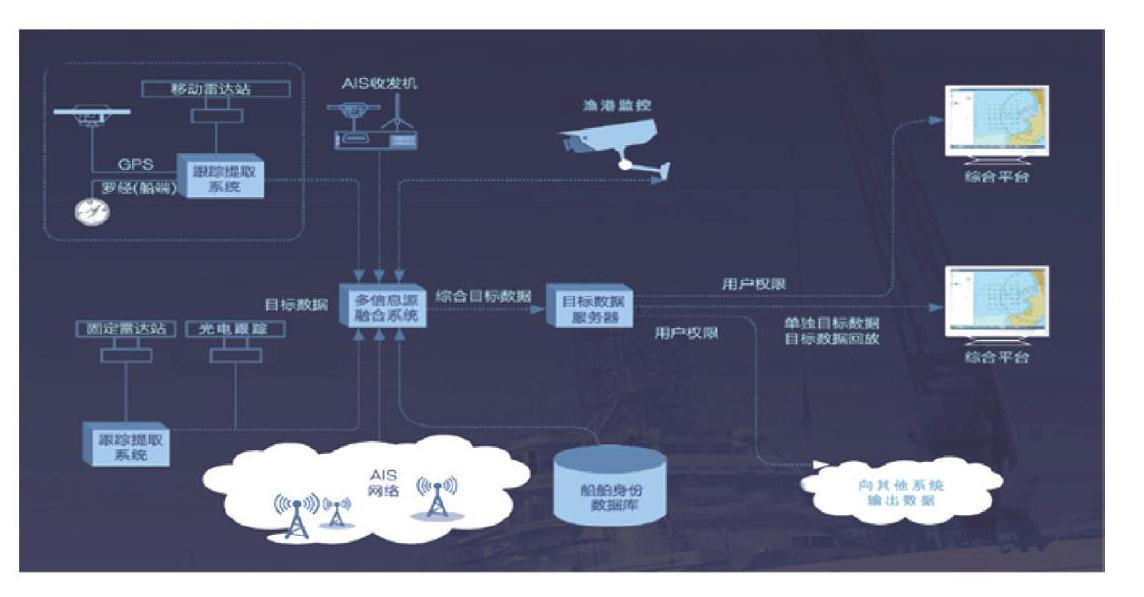
如圖1所示,海域多要素感知觀測與預警系統主要由雷達網、光電觀察設備、AIS、GPS、綜合信息處理平臺等組成。
海域多要素感知觀測與預警系統主要實現以下功能:
(1)漁業生產管理:雷達結合光電聯動對目標的進一步識別,可實時掌控海上漁船的分布態勢。有針對性地查處伏季休漁、“三無”漁船、套牌等違法違規行為;
(2)環境資源保護:實時監控重點區域(自然保護區、采砂區、水下文物保護區等),防范船只違規破壞海洋環境與資源;
(3)海洋監測:實時監測海洋氣象、海況、溢油泄漏;
(4)安全救助:故障、事故船只定位,事故過程調查,事故責任認定;
(4)漁船信息服務:海上氣象、海況、臺風信息,禁航區通告、漁船密度分布;
(6)漁獲物網上交易平臺:即時上架、實時下單、簡化到港后的流轉環節,提升新鮮度。
2感知觀測與預警關鍵技術
為了實現高精度、高可靠、高智能的感知觀測與預警,系統利用岸基、艦載、機載或星載等各種平臺傳感器,融合雷達、紅外、電子偵收( ESM)、AIS等多源特征進行海面目標綜合識別,解決同一目標多源特征時空匹配關聯和異源特征數據融合識別等問題,克服單一傳感器目標特征不確定性,實現高置信度海面目標識別[2-4];逐步建立完備的海面目標特征數據庫,采用電磁散射汁算和動靜態測量相結合的方法,利用實測數據迭代校驗,提高目標與海面復合電磁散射模型精度,進一步提高電磁散射計算的速度和精度,解決實測數據樣本不完備和數量少等問題;借助人工智能最新成果,采用機器學習、深度神經網絡等模式識別技術,學習訓練高分辨距離像、SAR/ISAR像等包含海面艦船目標的雷達回波數據,提高目標識別模式分類器的泛化能力,克服單純人工設汁的目標識別特征復雜環境適應性差、算法工程推廣能力低等問題。涉及的關鍵技術很多,下面列舉幾個。
2.1 基于非恒定自適應門限的目標全自動探測技術
該技術采用非恒定自適應門限的TBD( Track-before-detect)算法進行小目標自動錄取。該技術的主要特點有:
(1)將雷達覆蓋域分割成若干個小模塊,每個模塊的門限由本模塊的視頻統汁來決定;
(2)使用自適應門限進行雜波抑制,并利用先跟蹤后探測算法對目標進行跟蹤、提取;
(3)自動抑制海浪、雨雪雜波,在海況、雨雪條件變化時無須人工調整跟蹤參數,系統調試完畢后,參數通過自適應更新,以實現穩定跟蹤目標。
目前,該項技術已大量應用于浙江、山東、海南等省近海雷達監控系統,為海警、漁政、救撈船只,為漁船救助管理、海監執法、伏季休漁漁船管理執法等提供實時海面數據支撐。應用結果表明:在探測概率、同等條件下的探測距離、目標虛警率等核心參數領先于國內同類產品。
2.2雷達組網全目標融合技術
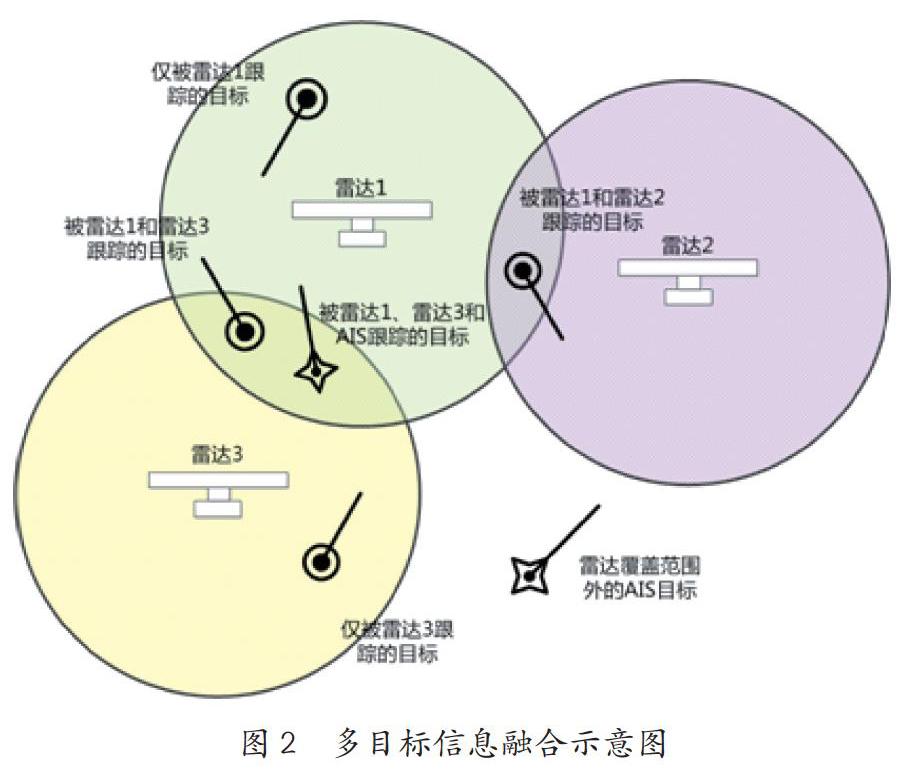
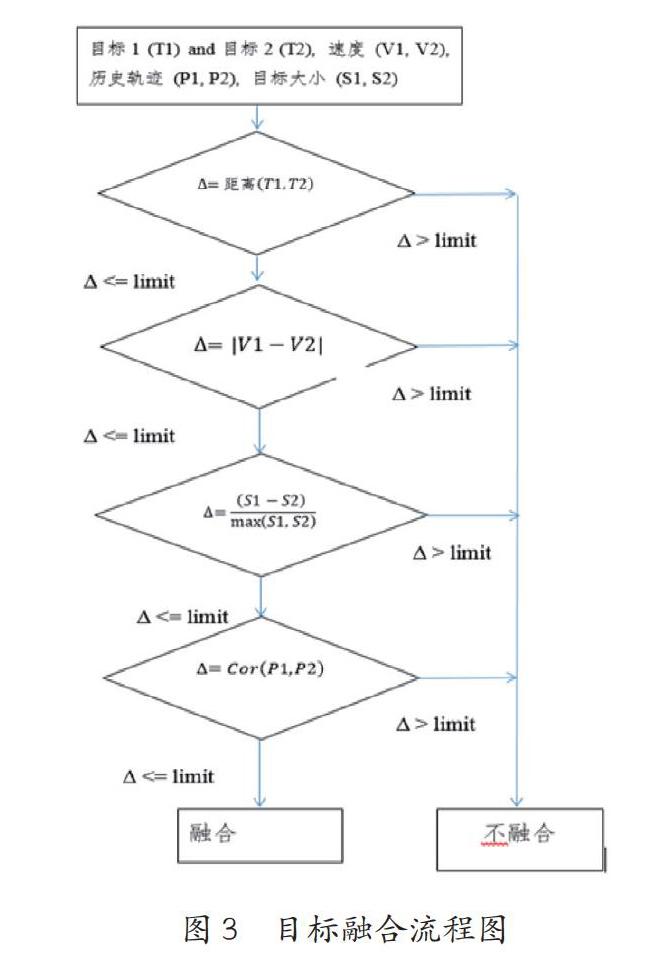
系統涉及現有的軍方觀通站、海事VTS、自建小目標雷達站等多雷達組網融合工作,需進行多目標信息融合處理[5-8]。多目標信息融合和目標融合流程分別如圖2和圖3所示,根據目標的多種特性判斷是否為同一目標進行融合,重點解決融合時可能出現非同一目標的融合而造成目標缺失的問題及相同目標的不融合造成目標重復的問題[9-11]。
該技術已在沿海多省近海雷達系統中得到應用,能夠實現多雷達站數據自動融合,融合率高達98%以上,且支持對溢油、海浪數據的融合。
2.3基于經驗正交分解的X-BAND雷達海浪探測技術
X-BAND雷達測波技術與測波浮標相比有運維成本低、可移動觀測、業務化程度高、探測范圍廣、數據連續性好等優點,已得到國內外普遍認可。該技術主要利用導航X波段雷達圖像,通過三維傅里葉變換譜分析反演出海浪參數,存在:(1)基于波浪場的空間均勻性和時間穩定性假設,而這一假設在真實的海區中很少成立;(2)譜分析反演算法中需要用到流體力學中的線性頻散關系,而海浪在近岸傳波時受到水深變淺和岸的折射的影響,線性頻散關系可能不適用,并且頻散關系方程中需要水深作為已知條件;(3)譜分析反演算法中需要用調制傳遞函數來描述導航X波段雷達復雜的成像機制,受到雷達極化方式、入射角、風速、風向、氣溫、海表層水溫、海面白帽等兇素的影響,這一函數很難準確確定。
為了克服傳統譜分析反演算法的缺點,有效解決非均勻波浪場的參數提取問題,我們從真實海區的非均勻波浪場出發,提出了適用于非均勻和均勻波浪場的經驗正交分解法(簡稱EOF算法)。該算法的核心流程如圖4所示,首先,利用經驗正交函數將導航X波段雷達圖像序列分解為不同的模態,從第一主模態的最大熵功率譜中提取海浪的周期,根據主成分的標準差與有效波高的經驗關系獲得海浪的有效波高;其次利用重構的第一模態海浪場的Fourier譜反演海浪的波向,并利用波浪條紋的相似性消除波向的180。模糊。
目前,該技術已在溫州海洋與漁業局、交通部救助船、海軍某部項目得到實際應用,效果良好,并于2016年系統通過了國家海洋標準汁量中心測試。
2.4基于雷達視頻處理的溢油探測與報警技術
該技術通過對普通海事雷達回波進行高級處理,可實現全自動、全天候、實時的探測,發現、跟蹤和監視溢油區域的變化。它既可以是一整套獨立的雷達系統,也可以將溢油探測處理模塊與船載導航雷達前端整合。在具備網絡傳輸的條件下,可以組成溢油監控網。
該技術的信息處理過程如下:首先,通過雷達視頻處理模塊,將雷達視頻分配給其他組件,通過溢油探測模塊處理原始雷達視頻并提取溢油信息;其次,將提取溢油信息傳送給溢油探測服務器,生成若干報警層并將其發送給管理部門,同時記錄原始數據,處理過的數據及報警信息;最后,將溢油探測處理結果可視化并提供區域配置工具。
目前,該技術已多次應用于中海油鉆進平臺,海事局巡邏船、溢油回收船等用戶。
3 應用案例
海域多要素感知觀測預警系統在福建沿海現已經完成30個站點布設,每個站點配備有雷達設備、光電設備、AIS設備、數據處理設備、電源管理設備等硬件設備和岸基近海雷達綜合監測系統數據綜合數據采集軟件等,通過專用網絡將雷達網監控信息發送至中心數據服務器,中心數據服務器進行數據的融合、處理、記錄并分發至各級應用終端。系統已經投入使用并取得成效,并多次受到領導的表揚。主要有:
(1)在2017年“金磚會議”期間,成功為海警總隊提供海上目標監控,在2018年三季度與福建省海警總隊試用期間,配合總隊抓獲多起違法走私行為。
(2)在2018年伏休期內,為福建省海洋與漁業廳打擊違法作業漁船、非法海沙開采等提供實時監測手段,并協助福建省海洋與漁業執法總隊成功抓獲多起違法行為。
( 3) 2018年8月開始與海事局合作,已配合福建海事局進行多次海上交通事故調查,典型案例是10月31日福建海事局對沙埕港附近發生的“閩連漁運60059”沉船事故海難發生時間及地點準確調查,接到福建海事局協助調查的要求后,第一時間協助海事局通過系統回放功能,準確判斷事故船沉沒時間及地點,圖5為閩連漁運60059船位報告圖,圖6為閩連漁運60059沉船點定位圖;海事局及時安排救助船只現場搜救,為海上搜救贏得時間,海上救援船只成功救起十余人。該事故調查受到福建省領導高度贊揚。
4結語
海域多要素感知觀測與預警系統基于海洋觀測、海洋漁業、海洋執法等業務需求開發,通過對海面目標實時態勢的跟蹤觀測和海洋環境實時監測,實現包括海上目標、海洋環境、海洋水文氣象等實時動態數據綜合感知及智能預警分析。系統已經在福建省海洋漁業、海警、海事等部f J成功應用,取得了很好的效果,獲得省領導的認可及贊揚,具有很高的應用及推廣價值。
基金項目:
福建省科技計劃重點項目( N0.2017H0028)
集美大學國家基金培育計劃項目( NO.ZP2020042)
參考文獻
[1]李晉、姜曉軼.助力海洋強國建設:海洋信息互聯互通、深度融合、智慧應用D]海洋信息,2018, (3):6-10.
[2]王晨熙,王曉博,朱倩等.雷達與AIS信息融合綜述[J].指揮控制與仿真,2009, 31 (2):2-4.
[3] Won Eun-Sung, Ouchi Kazuo.Ship detection bySynthetic Aperture Radar with groud-based maritime radar withAIS[C]//Progress in Electromagic Research Symposium, PIERS2011.Suzhou: E[ectromagnetic Academy, 2011: 31-34.
[4]彭冬亮,文成林,薛安克.多傳感器多源信息融合理論及應用[M].北京:科學出版社,2010: 23-24.
[5]劉傳潤,鮑君忠.AIS與VTS的雷達目標動態信息融合算法與實現[J].航海技術,2007 (2):37-39.
[6]李維運.VTS中雷達和AIS信息融合算法探討[J].中國水運.2006(7): 116-118.
[7]沈飛,郭軍.基于BP神經網絡的數據融合方法[J].自動化與儀器儀表,2005( 5).
[8]鄭佳春,于浩等.分布式自適應多傳感器多目標跟蹤算法[J].中國慣性技術學報,2015, V0123(4):472~476.
[9] Hu Xiaorui, Lin Changchuan.A Preliminary Studyon Torgets Association Algorithm of Rdddr and AIS UsingBP Neural Network. Procedia Engineering[J]. ProcediaEngineering(Sl 877-7058) ,2011(15):1 441 -1445.
[10]Zheng Jiachun, Wang Yang etc.A Fusion A[gorithm ofTarget Dynamic Information for Asynchronous Multi-Sensors[J].Microsystem Technologies, 2017, V0123 (11): 1-11.
[11]Cao Changyu, Zheng jiachun etc. Investigation of dPromoted You Only Look Once Algorithm and lts Applicationin Trafile Flow MonitoringDl.Applied sciences, 2019, Vol 9 (17}1-14
作者介紹:
林化琛,碩士,從事通信及物聯網技術研究;
鄭佳春,教授,從事智能信息處理、人工智能研究,(E-mail)jchzheng@jmu.edu.cn;
黃一琦,碩士研究生,從事深度學習研究