基于Leap Motion手語語音轉換的設計與實現
2020-05-15 15:00:25姜檬郭仁春李俊龍王志淳
無線互聯科技 2020年7期
姜檬 郭仁春 李俊龍 王志淳


摘? ?要:文章介紹了基于Leap Motion手語語音轉換的原理以及在實際中如何實現應用,其能夠將手語手勢翻譯成所需語言,并且以語音的形式傳遞消息,實現為聾啞人“發聲”的目的。Leap Motion手語語音轉換的硬件部分采用Leap Motion體感控制器,能夠實時采集人手指的坐標、加速度、方向等動態手勢的運動信息。軟件采用Unity 3D三維引擎,提供了開發手勢識別的SDK,并給出了一些基本手的模型,在Unity 3D中完成由手勢到文字,再到語音的轉換。
關鍵詞:動態手勢識別;厲動;Unity 3D
1? ? 手勢識別
手勢識別是手語語音轉換的首要步驟,包括手勢的采集與手勢識別。手勢的釆集廣泛使用的方法有數據手套[1]、專業的視頻釆集攝像機等[2]。而手勢識別的研究方向有兩個:一個是靜態手勢識別,另一個是動態手勢識別。靜態手勢識別始于20世紀初,主要利用獲取到的單個時間點的手勢圖像中手的形狀、手指的姿態等信息進行手勢表達含義的識別[3]。相比于靜態手勢識別,動態手勢識別要稍晚一些,需要對連續一段時間的手勢圖像信息進行圖像處理,通過獲取處理后的連續時間內手、手指的位置、速度等數據信息來識別手勢表達的意義[4]。
本文提出的基于Leap Motion的手語語音轉換是基于視覺(圖像)的手勢識別系統[5],采用的手勢識別系統是Leap Motion體感控制器,是支持C#語言的三維引擎,且提供了手勢開發的軟件開發工具包(Software Development Kit,SDK),為手勢定義成文字提供了便利條件。本文是使用C#語言對手語語音轉換進行開發的。
2? ? Leap Motion手語語音轉換的原理
2.1? Leap Motion功能介紹
本文采用的Leap Motion是Leap公司最新研發的體感控制器,是一款微米級3D手動交互設備,十分小巧且應用廣泛。當手在傳感器上方活動時能夠實現對手和手指的運動追蹤。能夠追蹤到一個人10根手指的三維坐標信息且位置精度高達0.01 mm,具有150°的超寬幅空間視場,能夠以高達每秒200幀以上的速度追蹤一個人的手部移動。延遲比顯示器的刷新率還要低,特別適合做手語翻譯器。
Leap Motion內置兩個紅外攝像頭,從不同角度捕捉兩張畫面,重建出手掌在真實世界三維空間的運動信息。檢測的范圍大體在傳感器上方25~600 mm之間,檢測的空間大體是一個倒四棱錐體。
Leap Motion的系統采用了右手笛卡爾坐標系,返回的數值都是以真實世界的毫米為單位。如圖1所示,原點在Leap Motion 控制器的中心,X軸和Z軸在器件的水平面上,X軸和設備的長邊平行,Z軸和短邊平行。Y軸是垂直的,以正值增加形式朝上。
Leap Motion能夠實時監測信息。使用過程中,Leap Motion傳感器會定期發送關于手的運動信息,每份信息稱為“幀”,Leap Motion傳感器會給所有手指手掌的列表和信息分配一個唯一標識(ID),在手掌、手指或手持的工具保持在視野范圍內時,不會改變。一旦手從設備的視野中丟失,再次被發現時就會重新為視野中的手分配一個全新的ID號。
2.2? Leap Motion手語語音轉換設計原理
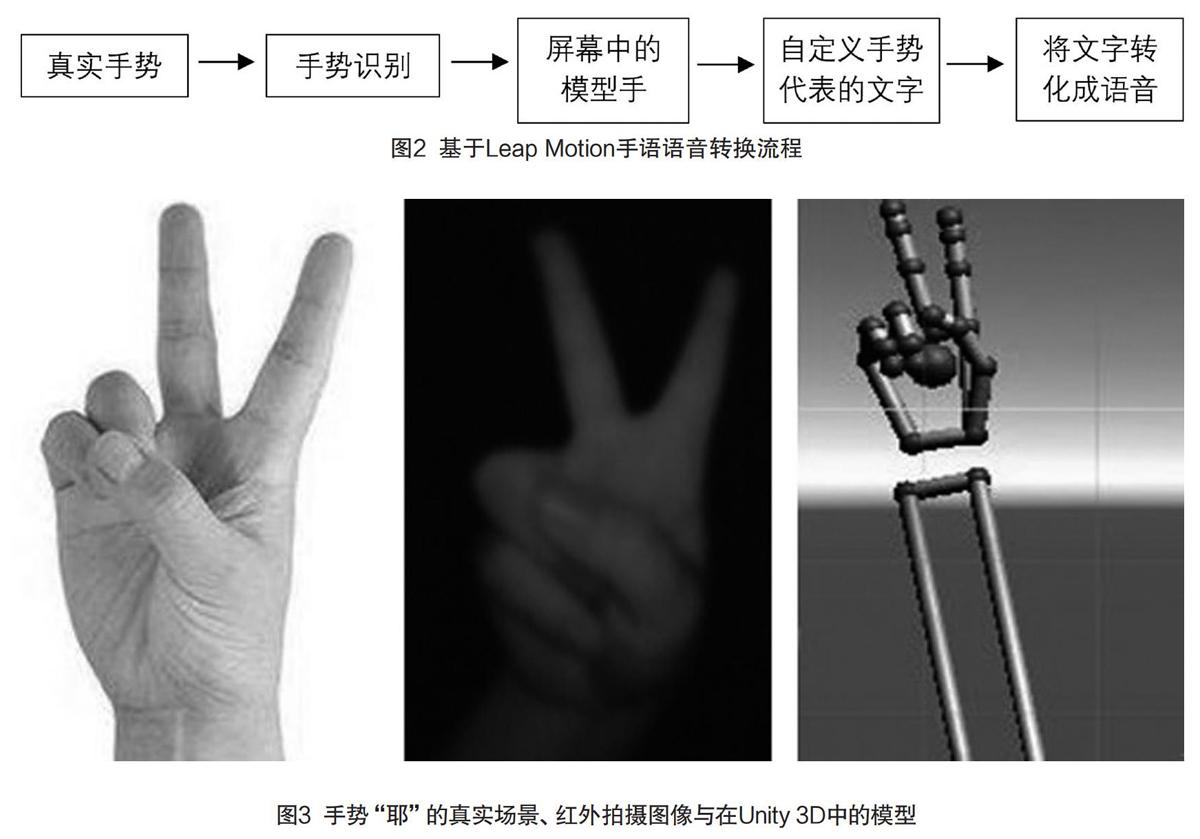
本文對Leap Motion手語語音轉換的研究分為5個部分,即真實世界的手勢、手勢識別、屏幕中的模型手、自定義手勢代表的文字、文字轉化成語音,如圖2所示。
以“耶”的手勢為例,當Leap Motion設備安裝完成并運行之后,在鏡頭視野范圍之內做“耶”的手勢,如圖3(左)所示。手的姿態通過紅外攝像頭采集到電腦上,形成如圖3(中)所示的紅外圖像,由于是雙紅外攝像頭,會形成兩張視角有一定偏差的圖像,根據這兩張圖像,可以計算出手姿態的三維信息,包括手指、手掌的位置、速度、方向和加速度。將數據傳給系統提供的三維手模型,屏幕上就會同步出現一個虛擬的三維手,如圖3(右)所示,其動作與真實手基本一致。
要自定義手勢代表的文字,調用Unity 3D中提供的手勢開發的SDK,編寫程序對“耶”的手勢定義成文字并在屏幕中展示該文字。最后將文字轉化成語音,利用系統自帶的語音庫Speechlib方法將文字轉化成語音,運行代碼,就會有“耶”的聲音發出。
3? ? 在Unity 3D中實現手語、文字和語音的轉換
3.1? 手勢實現的原理
將a定義為右手拇指第三指節的長度,將此長度設置為參考長度。當手指指尖與手掌中心的距離大于3個參考長度規定為張開手指,當手指指尖與手掌中心的距離小于1個參考長度規定為握住手指。用參考長度作為判據,分別計算各個手指的指尖到手掌中心的距離,就可以識別手的某一姿態,如圖4(左)所示。
例如手勢“耶”的定義是:食指、中指指尖與手掌中心的距離大于3個參考長度,即b>3a。拇指、無名指、小指指尖與手掌中心的距離小于1個參考長度,即c 3.2? 手勢轉換成文字的實現過程 下載并安裝Leap Motion設備的SDK及驅動軟件,之后插入Leap Motion設備,電腦右下角狀態欄會顯示“Leap Motion Controller is on”,此時硬件安裝完畢。確保可以正常使用Leap Motion設備之后,在Unity 3D中定義各種手勢所代表的文字。運行程序后將真實手勢放在Leap Motion設備的識別范圍內,屏幕中會出現與真實手相同手勢的模型手,相應的文字同時顯示在屏幕上。 3.3? 文字到語音的轉換 Speechlib是Windows系統自帶的語音庫。將下載的Interop.SpeechLib.dll粘貼到unity中新建的Plugins文件夾下,即可將此語音庫引入Unity中。在編譯環境中輸入‘using SpeechLib;這段代碼后,即可引入支持語音合成(Text to Speech,TTS)的核心類:SpVoice類。通過SpVoice對象調用TTS引擎。 具體實現以“耶”的手勢為例,當滿足“耶”的手勢之后,實例化一個SpVoice對象v,調用該對象的Speak函數v.Speak(“耶”),系統就可以發出該手勢所對應的聲音了。 4? ? 結語 本文首先介紹了Leap Motion的基本功能,接下來給出了手語語音轉換實現的基本步驟,即硬件應用Leap Motion在Unity 3D的環境下對手勢進行編程、定義手勢、轉換成語音,基本實現了手勢到語音的轉換。 [參考文獻] [1]王鵬.動態手勢識別研究[D].大連:大連理工大學,2013. [2]SHUKLA J,DWIVEDI A.A method for hand gesture recognition[C].Bangkok:Fourth International Conference on Communication Systems & Network Technologies IEEE,2014. [3]HASANUZZAMAN M D,ZHANG T,AMPORNARAMVETH V,et al.Adaptive visual gesture recognition for human-robot interaction using knowledge-based software platform[J].Robotics and Autonomous Systems,2007(1):643-657. [4]任磊.基于Leap Motion的動態手勢識別研究[D].大連:大連理工大學,2015. [5]楊全,彭進業.基于深度圖像信息的手語識別算法[J].計算機應用,2013(10):2882-2885. Design and implementation of voice conversion based on Leap Motion sign language Jiang Meng, Guo Renchun, Li Junlong, Wang Zhichun (Shenyang University of Chemical Technology, Shenyang 110142, China) Abstract:This paper introduces the principle of sign-language conversion based on Leap Motion and how to implement it in practice. It can translate gestures into the required language and transmit messages in the form of speech, so as to achieve the purpose of “voice” for deaf-mute people. The hardware part of sign-language speech conversion based on Leap Motion uses motion-sensing controller called Leap Motion, which can collect the motion information of the fingers coordinate, acceleration, direction and other dynamic gestures in real time. The software uses Unity 3D engine,? provides an SDK for developing gesture recognition, as well as some basic hand models for converting gestures to text and then to speech in Unity 3D. Key words:dynamic gesture recognition; Leap Motion; Unity 3D
猜你喜歡
海峽姐妹(2020年9期)2021-01-04 01:35:44
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
中華手工(2017年2期)2017-06-06 23:00:31
山東青年(2016年1期)2016-02-28 14:25:25
中外會展(2014年4期)2014-11-27 07:46:46
當代修辭學(2014年3期)2014-01-21 02:30:44
公務員文萃(2013年5期)2013-03-11 16:08:37
海外英語(2006年11期)2006-11-30 05:16:56
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
