基于全息測繪的機(jī)場安全隱患監(jiān)管
2020-05-29 07:58:02陳少星
湖北農(nóng)機(jī)化 2020年5期
陳少星
(江西外語外貿(mào)職業(yè)學(xué)院,江西 南昌 330099)
1 全息測繪數(shù)據(jù)
全息數(shù)據(jù)包括利用車載移動(dòng)測量系統(tǒng)獲得的機(jī)場跑道及停機(jī)坪區(qū)域的360度全景影像及點(diǎn)云數(shù)據(jù),以及由無人機(jī)航飛所獲取的機(jī)場及其周邊區(qū)域的航拍影像和機(jī)載激光點(diǎn)云數(shù)據(jù)。此外,由這些數(shù)據(jù)所生成的DLG(數(shù)字線畫地圖)、DEM(數(shù)字高程模型)、DOM(數(shù)字正射影像地圖)、DSM(數(shù)字地表模型)等各類空間地理數(shù)據(jù)。
2 全息測繪關(guān)鍵技術(shù)
2.1 車載移動(dòng)測量系統(tǒng)
2.1.1 外業(yè)數(shù)據(jù)采集
外業(yè)數(shù)據(jù)采集作業(yè)簡單、便捷,基本上只需要2~3人(駕駛員一名,操作員一名,以及可選導(dǎo)向員一名),以20~30km/h的汽車行駛速度,外業(yè)一天的工作能夠保證100km以上的采集范圍,相對(duì)于傳統(tǒng)方式有了極大的提高。具體的外業(yè)操作流程及步驟如下:
2.1.2 內(nèi)業(yè)數(shù)據(jù)處理
外業(yè)數(shù)據(jù)采集之后,在內(nèi)業(yè)數(shù)據(jù)處理的效率上,外業(yè)一天采集的數(shù)據(jù),當(dāng)天晚上就能夠完成全部數(shù)據(jù)的處理工作。并且數(shù)據(jù)處理的過程完全實(shí)現(xiàn)軟件自動(dòng)化,無需過多的人工干預(yù)。
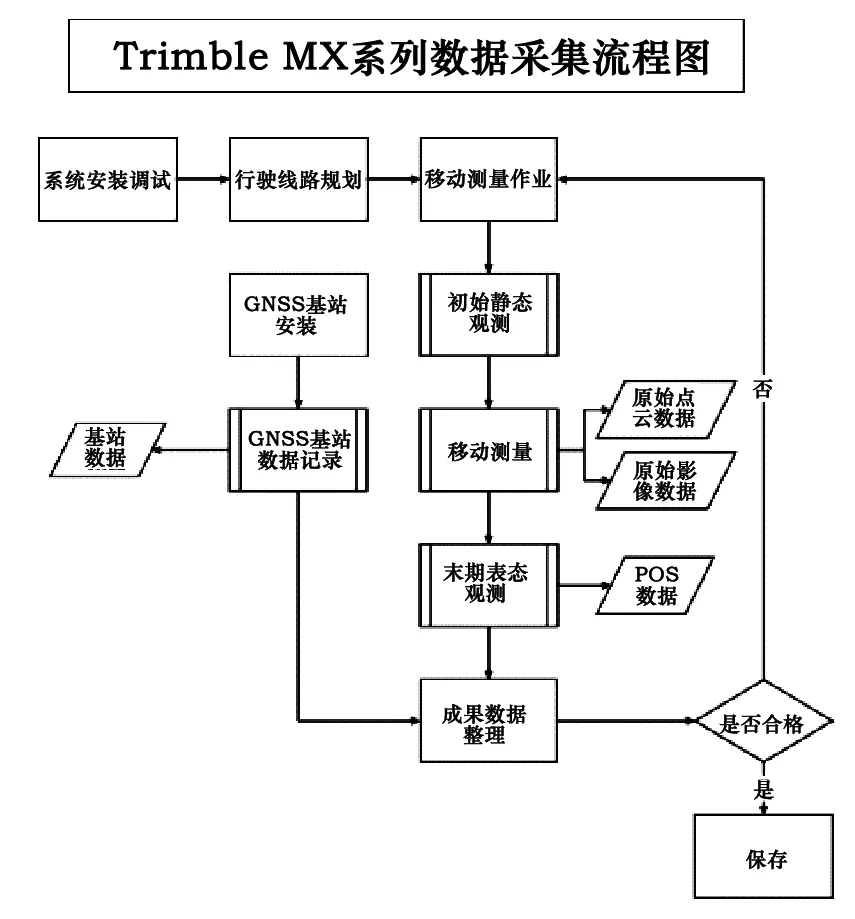
圖1 Trimble MX系列數(shù)據(jù)采集流程圖
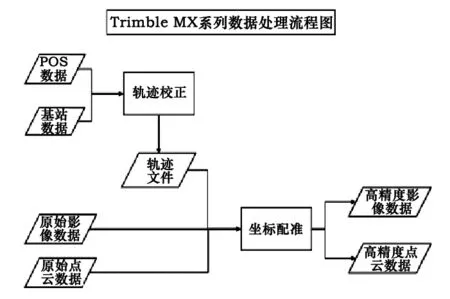
圖2 Trimble MX系列數(shù)據(jù)采集流程圖
2.2 無人機(jī)航測系統(tǒng)
無人機(jī)航攝獲取及處理主要具有操作靈活、數(shù)據(jù)更新速度快及成本低廉等優(yōu)點(diǎn)。其主要工作流程如下圖:
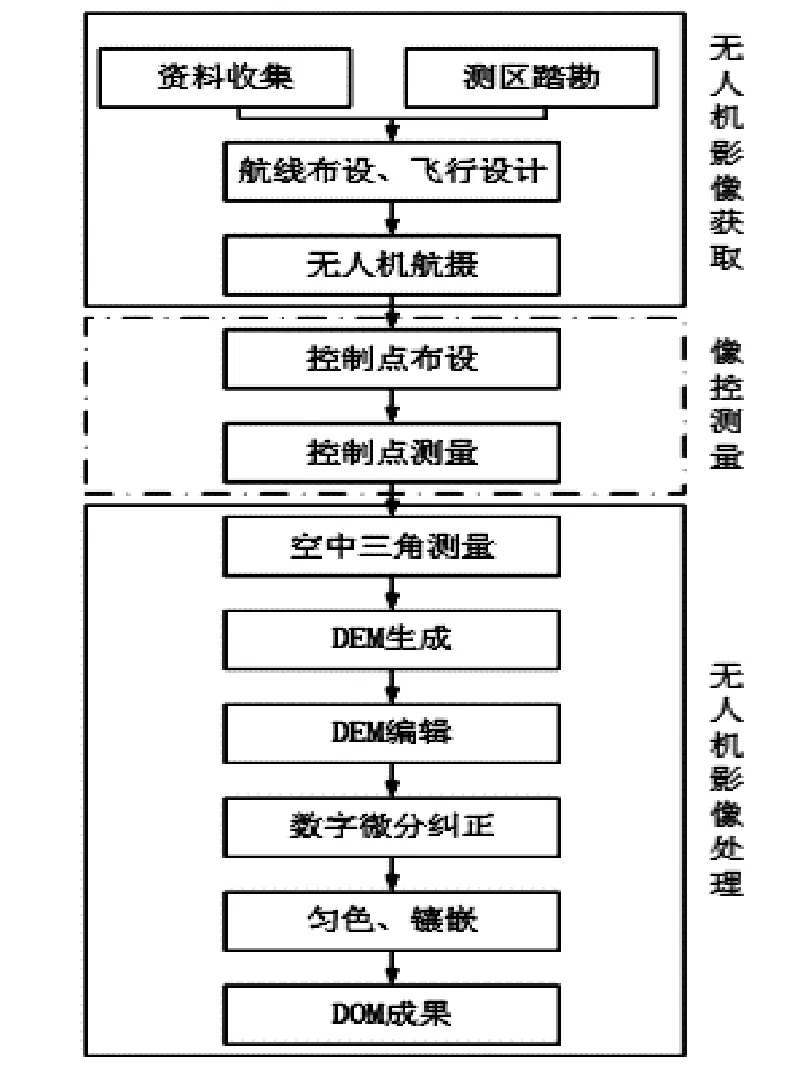
圖3 無人機(jī)數(shù)據(jù)獲取及處理流程
3 安全隱患監(jiān)管系統(tǒng)
3.1 系統(tǒng)開發(fā)
系統(tǒng)平臺(tái)設(shè)計(jì)開發(fā)技術(shù)路線為:基于用例驅(qū)動(dòng)的、面向?qū)ο蟮摹?gòu)件化設(shè)計(jì),其開發(fā)技術(shù)路線實(shí)現(xiàn)流程如圖所示。在對(duì)GIS接口的支持中,提供良好的、規(guī)范的GIS接口。
3.2 系統(tǒng)功能
3.2.1 停機(jī)坪及跑道異物檢查
利用移動(dòng)測量車靈活、機(jī)動(dòng)、快速的特點(diǎn),在不影響機(jī)場運(yùn)行的情況下,對(duì)機(jī)場跑道及停機(jī)坪區(qū)域進(jìn)行快速全息數(shù)據(jù)采集工作。在獲取停機(jī)坪及跑道的全息影像數(shù)據(jù)之后,數(shù)據(jù)分析人員在辦公室內(nèi)通過對(duì)影像數(shù)據(jù)的回放、瀏覽,查找可疑異物,如坑洼、積水、油污、明顯刮痕、螺絲帽等。
3.2.2 安全事故調(diào)查
發(fā)生安全事故之后,應(yīng)當(dāng)利用移動(dòng)測量車快速采集事故現(xiàn)場影像,用于存檔、量測及后期取證。移動(dòng)測量車快速、靈活的特性在這里可以得到完美的體現(xiàn),對(duì)于西南,或者新疆等地區(qū),在調(diào)查現(xiàn)場一旦遇到風(fēng)沙天氣或者暴雪天氣,很可能會(huì)在短時(shí)間內(nèi)破壞了現(xiàn)場,需要在現(xiàn)場被破壞之前快速地把現(xiàn)場數(shù)據(jù),影像信息收集回去做后期的分析處理。
4 總結(jié)
利用全息測繪的方式,通過建立GIS系統(tǒng)對(duì)機(jī)場安全隱患進(jìn)行系統(tǒng)管理是一個(gè)很有效的技術(shù)手段,在實(shí)施的過程中應(yīng)當(dāng)采用漸進(jìn)式的操作方式,分階段逐步實(shí)施,在建設(shè)過程中不斷驗(yàn)證和嘗試,才能將機(jī)場安全隱患監(jiān)控這一項(xiàng)目落到實(shí)處。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
