基于GO法的艦載機折疊翼控制系統可靠性分析
2020-05-30 01:01:56初雨田段富海翟祎琳
機電工程技術 2020年4期
初雨田,段富海※,翟祎琳
(1.大連理工大學機械工程學院,遼寧大連 116023;2.大連海洋大學機械與動力工程學院,遼寧大連 116300)
0 引言
航空母艦是一個國家綜合國力的集中體現,是現代海軍不可或缺的裝備,也是海戰最重要的作戰平臺。航母的戰斗力取決于它所能搭載的艦載機性能和數量,所以航母上的空間可謂寸土寸金。如何極大節約航母上寶貴的空間,減小艦載機所占位置,以增加數量,很大程度上取決于艦載機機翼折疊技術[1-2]。因此機翼折疊技術應用領域不斷擴大。
艦載機折疊翼由內翼和外翼組成,內翼與機身連成一體[3]。當艦載機存儲和運輸時,外翼相對于內翼繞鉸鏈向上轉動,來節省展向占用空間。目前艦載機折疊翼的折疊按其動力源可分為液壓折疊和電動折疊[2],例如我國殲-15艦載機機翼折疊采用液壓驅動折疊,然而液壓驅動存在管路復雜、重量大、使用維護不便、故障率高等問題,因此采用電作動技術實現機翼的折疊顯得尤為重要。縱觀近幾年折疊機翼的發展不難發現,先進控制驅動設備和多樣化的折疊方式使得折疊機翼控制系統越來越復雜,所以折疊機翼控制系統的可靠性備受人們關注。
目前,分析艦載機折疊翼控制系統的可靠性主要有兩種方法:故障樹分析法(Fault Tree Analysis)和GO法(Goal-Oriented methodology)。對復雜系統,故障樹分析法由于建樹困難、建模一致性差等存在一定的局限性。美國Kaman公司于20世紀60年代提出了GO法的概念,并且利用GO法成功地進行了武器系統的可靠性分析。近幾年,隨著計算機發展,GO法也在逐漸發展和完善。相比于故障樹分析法,GO法更適用于分析復雜、多狀態的系統。例如馬駿等[4]應用GO法分析了航空發動機控制系統的可靠性;金霞等[5]利用GO法分析了電動靜液作動器的可靠性;杜彥斌等[6]利用GO法對機床再制造工藝過程進行了可靠性分析;張慕天等[7]利用模糊GO法分析了飛機主動側桿控制系統的可靠性。
本文利用GO法定量地分析艦載機折疊翼電作動控制系統的可靠性。首先分析艦載機折疊翼控制系統,對照其原理圖建立GO圖模型,對折疊翼的可靠性進行定量計算和分析,并將結果同FTA法進行對比,驗證了GO法在艦載機折疊翼控制系統可靠性分析中的精確性。
1 艦載機折疊翼控制系統原理
艦載機折疊翼控制系統的原理圖如圖1所示。整個控制系統可分為兩個層次,即變形控制系統和飛行控制系統[8]。艦載機通過變形控制系統對變形機構進行控制,從而實現機翼的折疊和展開,飛行控制系統除了控制整個艦載機的飛行狀態外,還需要在變形機構按預定程序變形時維持艦載機的穩定。
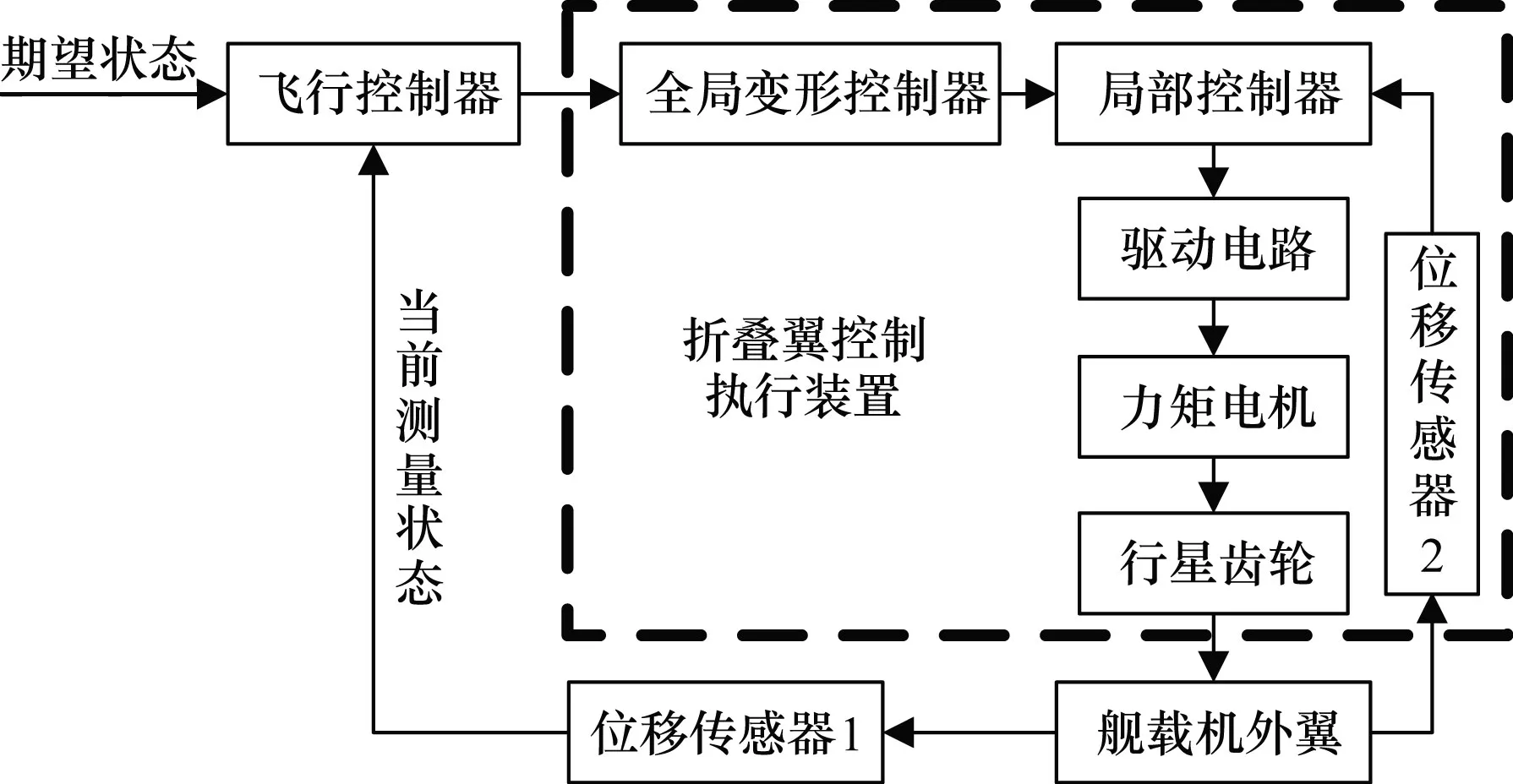
圖1 艦載機折疊翼控制系統原理圖
目前,艦載機折疊翼的折疊機構主要有連桿機構、齒輪機構等[9]。本文利用一種行星齒輪減速機構,不僅可以降低大功率電機的轉速,調高其轉矩,還具有傳動平穩、抗沖擊能力強以及工作可靠等優點。工作時,行星減速器的輸入端和力矩電機的輸出端相連,由行星架帶動艦載機的外翼進行平穩折疊和展開,艦載機外翼的位移信號由傳感器獲得,并將反饋信號傳遞給飛行控制器和局部控制器進行處理,從而實現折疊機翼的準確控制。
2 GO法分析艦載機折疊翼控制系統可靠性
GO法進行系統分析時,首先以成功為導向建立系統的GO圖;然后依照GO法操作符的運算規則,按照信號流的序列進行系統的狀態概率計算;最后得到系統成功運行的概率[10]。
2.1 系統GO圖建模
通過分析艦載機折疊翼控制系統中各組件的功能,根據GO法中17種操作符的特點,將系統的原理圖轉化為GO圖,如圖2所示。圖中組件與GO法操作符的對應關系及可靠性數據如表1所示。表中狀態值0表示組件提前狀態(如電機線路短路等引起的提前啟動狀態),狀態值1表示組件成功狀態,狀態值2表示組件故障狀態。

圖2 艦載機折疊翼控制系統GO圖
圖2中,用第5類信號發生器操作符表示控制信號和指令信號;用第1類兩狀態單元操作符表示飛行控制器、全局變形控制器、局部控制器、驅動電路、行星齒輪、艦載機外翼、位移傳感器1和位移傳感器2;由于力矩電機具有提前、成功、故障3種工作狀態,故可用第3類觸發發生器操作符表示。
2.2 GO運算
運用狀態累積概率算法進行GO運算,當存在共有信號時,需要進行修正[11],結合表1中的數據進行計算,圖2中關鍵信號流的表達式如下。

表1 艦載機折疊翼控制系統操作符數據
(1)信號流4

式中:ARj(i)為輸出為i時信號流j的狀態累積概率;ASj(i)為輸入為i時信號流j的狀態累積概率;PRj(i)為輸出為i時信號流j的狀態概率;PSj(i)為輸入為i時信號流j的狀態概率;PCj(i)為操作符狀態為i時信號流j的狀態概率。
代入表1數據,通過計算可得PR15(0)=0.999 964 9,PR15(1)=1.50×10-5,即艦載機折疊翼控制系統提前啟動的概率值為1.50×10-5,正常運行的概率值為0.999 964 9。
3 FTA法分析艦載機折疊翼控制系統可靠性
FTA法是一種基于邏輯因果關系的圖形分析法,可用于各種系統的可靠性分析和風險評價[12]。以艦載機折疊翼故障為頂事件,建立艦載機折疊翼控制系統的故障樹,見圖3。

圖3 艦載機折疊翼控制系統故障樹圖
由故障樹頂事件的計算方法可得:

整理可得:

故艦載機折疊翼控制系統正常運行的概率為:

式中:λi為第i個事件發生概率;Pi為第i個事件不發生概率。
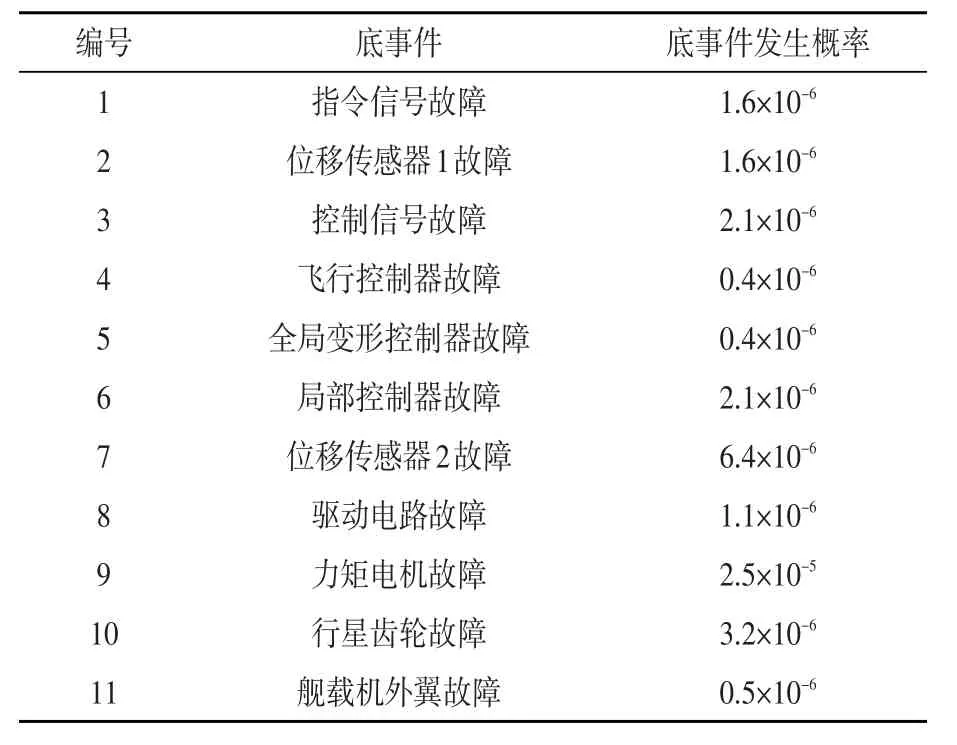
表2 各底事件數據
故障樹中各底事件發生的概率如表2所示,根據表中的數據,計算得出艦載機折疊翼控制系統正常運行的概率為PE=0.999 955 6,失效率λE=1-PE=4.439 936 0×10-5。
4 GO法與FTA法對比
(1)從建模過程看,二者都是以圖形來描述艦載機折疊翼的控制系統,利用GO法分析系統的可靠性時是以成功為導向,從輸入端開始,根據系統組件的可靠度逐步分析成功結果。FTA法是以故障為導向,先找到代表系統故障的頂事件,按照系統層級結構逐步展開,同時在建立故障樹時需要進行合理的簡化,以便后續的計算。GO圖更能反映出系統內各個組件之間的相互作用和關系,更加類似原理圖,而故障樹圖能清晰地反映出系統內組件的故障狀態和邏輯關系,便于分析系統的故障原因。
(2)從計算過程看,利用GO法計算艦載機折疊翼控制系統的可靠性要比FTA法更復雜。GO法計算的成功概率為PR15(0)=0.999 964 9,而故障樹分析法計算的成功概率為PE=0.999 955 6,二者有微小的差異,主要是由于GO法中的功能操作符和邏輯操作符的類型更多,能夠表示系統組件的多種狀態,在分析艦載機折疊翼可靠性時,利用GO法分析過程中考慮了力矩電機的提前工作狀態(電機線路短路等引起),而FTA法則不同,它只考慮系統組件的成功和故障兩種狀態,所以造成了計算結果的微小差異。
5 結束語
(1)研究了GO法和FTA法在艦載機折疊翼控制系統可靠性定量評估分析中的應用,并將二者的建模過程和計算過程進行對比,最終得到的系統成功運行概率基本一致,從而驗證了GO法在艦載機折疊翼控制系統可靠性分析中的可行性和正確性。
(2)艦載機折疊翼控制系統是一種多狀態系統,GO法可以表示系統的多種狀態,因此相比于FTA法,利用GO法分析艦載機折疊翼控制系統時考慮問題更加合理,更符合系統的實際工作狀況,故GO法更加真實精確。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
山東工業技術(2016年15期)2016-12-01 05:31:22
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(2015年6期)2015-04-17 03:31:50