機載毫米波InSAR測繪困難地區地形測圖實踐
2020-05-30 21:53:29韋立登李永杰孫中昶高建
南京信息工程大學學報 2020年2期
韋立登 李永杰 孫中昶 高建
摘要干涉合成孔徑雷達(Interferometric Synthetic Aperture Radar,InSAR)已成為獲取高精度數字正射影像圖(Digital Orthophoto Map,DOM)和數字表面模型(Digital Surface Model,DSM)的關鍵技術之一,其不受天氣狀況的影響,可以全天時、全天候進行數據獲取.機載雙天線毫米波InSAR不受失相關的影響,具有小體積、高分辨率、機動靈活等特點,可以實現大尺度、高精度成像.本研究利用機載雙天線毫米波InSAR通過干涉批處理、區域網平差、地理編碼、圖像拼接鑲嵌等步驟生成了貴州施秉試驗區(丘陵、山地)和四川邛崍試驗區(高山地)高精度的DOM與DSM,并利用地面控制點(GCPs,Ground Control Points)進行了精度驗證,驗證結果表明獲取的DSM精度符合1∶5 000地形圖繪制要求,表明了機載雙天線毫米波InSAR具備生成不同地形的DOM/DSM的能力,為解決困難地區DOM/DSM數據缺失問題提供了新的技術手段.關鍵詞機載毫米波InSAR;區域網平差;高精度;數字表面模型;數字正射影像圖
中圖分類號P225.7
文獻標志碼A
0引言
InSAR可以全天時、全天候快速獲取大面積高精度的地表三維信息,已經成為獲取高精度數字表面模型(Digital Surface Model,DSM)的重要技術手段[1].機載雙天線毫米波InSAR不受失相關因素影響,具有體積小、分辨率高、實時獲取、機動靈活等特點,并且其波長短、穿透性弱,更加有助于DSM的獲取.
獲取DSM的手段主要包括外業測繪、衛星遙感、航空攝影測量、激光雷達、干涉合成孔徑雷達等技術.傳統的外業測繪耗時耗力,并不合適獲取大范圍的DSM;激光雷達雖然可以獲取高精度的DSM,但是其技術門檻較高;通過衛星遙感、攝影測量等手段獲取我國西南地區DSM時,常常受云、霧、雨等天氣狀況的影響,獲取數據的質量和精度會受到很大程度的影響,造成部分地區DSM數據缺失;而InSAR可以克服這些天氣狀況的影響,可以全天時、全天候、大范圍進行數據獲取,在對地觀測領域起著舉足輕重的作用[2].
星載InSAR雖然覆蓋區域較廣,但是其衛星軌道相對固定,不能隨意改變研究區域,而機載雙天線毫米波InSAR可以機動靈活地選取研究區域,不受失相關因素的影響,并且毫米波可用頻帶寬,應用較小口徑天線即可獲取更窄的天線波束以及更高的天線增益,可以實現距離向和方位向的高分辨率成像.另外,機載毫米波InSAR系統使用毫米波,波長較短,相較于其他InSAR系統,機載毫米波系統的天線和微波器件也會相應減小,更加有利于實現雷達系統小型化,可以實現在無人機飛行平臺上應用.機載毫米波InSAR使用Ka波段的電磁波,相比C、S、X、Ku等波段其波長短,圖像細節更加清晰,同時其波長更加接近可見光,其雷達圖像的效果要優于其他InSAR圖像[3].
在國外一些發達國家,機載InSAR地形測繪技術已經很成熟,并且可以提供業務化運行的服務和產品.1951年,美國Goodyear宇航中心Carl Wiley最先提出InSAR技術,并在1969年首次將該技術應用到金星表面的測量[4];1986年,Zebker和Goldstein采用機載InSAR數據得到了高程精度為2~10 m的舊金山大橋地區的三維地形圖,證明了機載InSAR獲取高精度地形信息的能力[5];20世紀90年代初,采用STAR-3i系統通過Lear 36飛機對巴拿馬運河及周圍區域實施測圖任務,獲取的DSM精度為3 m,格網間距為10 m,雷達影像分辨率為2.5 m[6];1998年,德國機
載InSAR系統AeS-1對巴西北部區域和委內瑞拉南部進行區域測圖,獲取原始雷達影像分辨率為0.5 m,DSM高程精度達到0.5 m[7];2000年,美國“奮進號”航天飛機在佛羅里達州發射升空,歷時13 d獲取了北緯60°到南緯58°全球性的DSM,并且可以免費獲取[8];2003年,Intermap公司進行了NextMap美國計劃,獲得的數據產品包括精度為1 m,格網間距為5 m的DSM,雷達正射影像分辨率為1.25 m[9].我國機載SAR研制和星載SAR同時起步,目前已經可以生產多種型號的機載SAR系統,同時也進行了大量的試驗.2004年,中國科學院電子學研究所成功研制了X波段機載雙天線InSAR系統,并進行試驗,在地勢平坦地區取得了較好的效果[10];2011年,在國家“863”計劃的支持下,中國科學院電子學研究所研制出我國第一個機載毫米波三基線InSAR原理樣機,并于2011年5月在運12飛機上進行了試驗[11];2013年,中國航天科工集團第二研究院二十三所也研制出了機載毫米波SAR原理樣機,并進行了大量飛行試驗[12].
本研究利用機載雙天線毫米波InSAR系統通過干涉處理、區域網平差、地理編碼、圖像拼接鑲嵌等步驟,生成了貴州省施秉縣和四川省邛崍市2個試驗區的DOM(Digital Orthophoto Map,數字正射影像圖)和DSM,試驗區地形涉及丘陵、山地、高山區等,對解決丘陵、山區等困難地區DSM繪制提供參考.通過控制點驗證,生成的DSM滿足1∶5 000地形圖繪制要求,表明了機載毫米波InSAR具備生成不同地形條件下大比例尺DOM/DSM的能力.
本研究提出:1)基于GPU并行處理技術,進行干涉批處理,同時利用最小平衡樹的方法快速、精確地進行相位展開;2)基于SIFT算法全自動生成實驗區內影像間的連接點,極大提高了效率和精度;3)通過敏感度分析,基于視向量正交分解算法構建三維重建模型,利用區域網平差方法對基線長度、基線傾角、相位偏移量3個參數進行了精確的定標.
1試驗區概況與載機參數
1.1試驗區概況
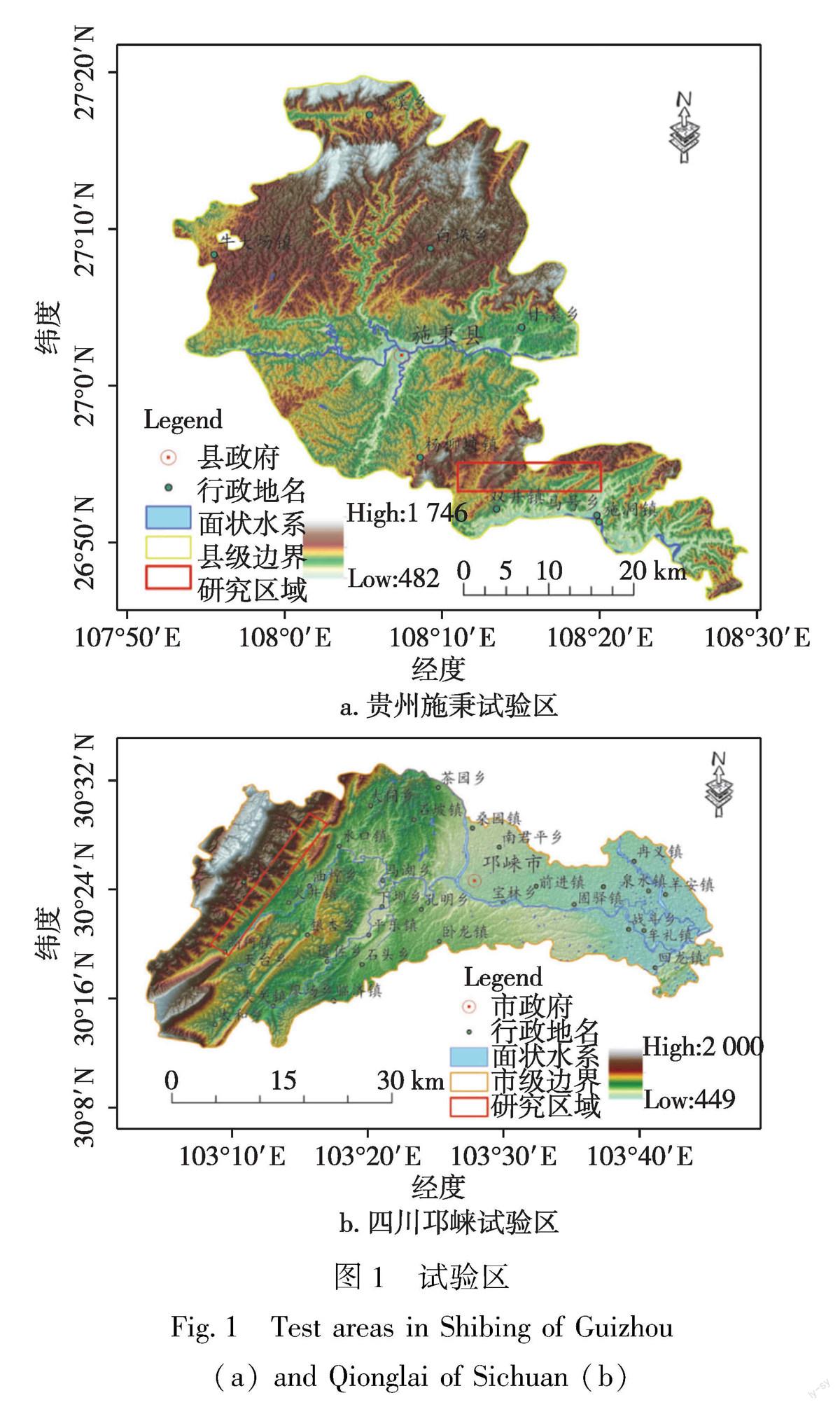
貴州施秉試驗區(圖1a)坐落于貴州省東南部,位于黔東南州苗族侗族自治州西北部施秉縣,經緯度范圍為:108.184°108.185°E,26.889°~26.919°N,試驗區長14.99 km,寬3.35 km,海拔范圍為560~1198 m.試驗區地貌主要以高山和丘陵為主,同時也包含一些城鎮、道路、農田、樹林等地物,整體地勢比較崎嶇.四川邛崍試驗區(圖1b)坐落于四川省中部,位于邛崍市西部山區地帶,經緯度范圍為:103.140°~103.283°E,30.319°~30.493°N,試驗區由西南至東北呈帶狀分布,長21.27 km,寬2.56 km,海拔范圍為:603~1 344 m.實驗區內主要以高山為主,同時也包含一些城鎮和農田,整體地勢非常崎嶇,起伏非常明顯.
1.2試驗區數據
使用機載毫米波InSAR系統由西向東方向獲取了貴州施秉試驗區3個條帶共21景機載數據,并且在試驗區首末端布置了26個GCPs(地面控制點)用于區域網平差與結果驗證,其中14個用于區域網平差,12個用于DSM和DOM結果驗證.
使用機載毫米波InSAR系統由西南至東北方向獲取了四川邛崍試驗區1個條帶共13景機載數據,并且在試驗區首末端布置了25個GCPs,其中12個用于區域網平差,13個用于DSM和DOM結果驗證.
1.3載機參數
采用機載雙天線毫米波InSAR系統獲取了2個試驗區的機載數據,載機參數如表1所示.
載機搭載高精度的航空定位測姿系統(POS AV610),完美地繼承了全球導航衛星系統和慣性導航系統,POS AV610在每秒鐘內可以對航空傳感器進行上百次的精確定位定向,能夠精確地獲取載機的三維坐標、姿態角、速度、加速度等實時載機信息,同時使用戶在處理數據時無需地面參考信息,消除了繁瑣耗時的航空攝影空三解算帶來的麻煩,極大提高了數據獲取的精度與效率.
2地形三維重建原理
本研究基于視向量正交分解[13-14]進行了地形三維重建,將視向量從載機移動坐標系轉換到地固坐標系,三維重建模型如圖2所示.
圖2a為Madsen引入建立的移動坐標系(Madsen Moving Coordinates,MMC),V軸為平臺速度矢量方向,W軸為速度矢量與基線矢量的叉積,N軸由V軸和W軸由右手法則共同決定,,,分別為三軸的單位矢量.b表示基線矢量,bv與bn為b在順軌和交軌方向的分量,b與水平面的夾角為θb,bn與水平面的夾角為α.
移動坐標系中,單位視向量可由、、表示:
=μ+η+ξ. (1)
設MMC坐標系下單位視向量表示為
=μηξ=sin βsin θ1-bvbnsin β-k2cos2 β-sin θ1-bvbnsin β2, (2)
其中,β為斜視角,表示為
sin β=λf/2v. (3)
θ1定義為回波到達方向角:
θ1=arcsinb22rbn+k1k2λφ2Qπbn-λ2φ28Q2π2rbn, (4)
Q為雷達工作模式,Q=1時為標準模式,Q=2時為乒乓模式;k1=1時表示右側視方式,k1=-1時表示左側視方式;k2=-1時表示主天線位于左側,k2=1時表示主天線位于右側.
圖2b為平臺坐標系,原點為載機POS相位中心,X軸指向載機機頭方向,Z軸為過原點垂直向下方向,Y軸垂直于X軸、Z軸構成的平面,指向飛行方向右側.載機在飛行過程中的姿態通過橫滾角θroll、俯仰角θpitch、偏航角θyaw來表示.旋轉矩陣表示為
Rroll=1000cos θroll-sin θroll0sin θrollcos θroll, (5)
Rpitch=cos θpitch0-sin θpitch010sin θpitch0cos θpitch, (6)
Ryaw=cos θyaw-sin θyaw0sin θyawcos θyaw0001. (7)
圖2c為機載InSAR三維重建模型,A1和A2分別表示載機主副天線相位中心的位置,H為主天線相位中心的高度.b表示基線矢量,由主天線指向副天線.P為地物點,高程為h,主天線相位中心到地物點P的矢量為r1,矢量長度為r,此方向上的單位矢量設為.O-XYZ為航跡坐標系,X軸指向理想航機方向,Z軸指向正上方向,Y軸垂直于X、Z軸構成的平面,并且指向左側方向.A和P分別為O到主天線相位中心和地物點的矢量.由移動坐標系到O-XYZ坐標系的旋轉矩陣為
Γ=1000k2cos θbnk1k2sin θbn0-k1k2sin θbnk2cos θbn=
1000k21-b2b2n sin2θbk1k2bbnsin θb0-k1k2bbnsin θbk21-b2b2n sin2θb. (8)
由式(1)—(8)可得,矢量P表示為
P=A+r=A+rRyawRpitchRrollΓvnw, (9)
式(9)為理想航跡坐標系下地物點位置的三維表達.
在正側視的條件下,雷達波束中心面即為零多普勒面,此時β=0.假設主天線位于載機左側,并且右側視情況下,地形高程表示為
h=H-r(cos θpcos(α-θr)cos θ1+cos θpsin(α-θr)sin θ1), (10)
其中,θ1為回波角,定義為
θ1=sin-1b2r-λ2πb-λ228π2rb. (11)
3數據處理流程
根據機載InSAR獲取的SLC數據,采用自主開發的機載InSAR數據處理軟件AirborneInSARMap,使用高性能的GPU并行技術,通過粗配準、精配準、干涉處理、相位濾波、相位解纏等干涉批處理步驟,批量、快速地獲取測區內每景影像對應的解纏相位數據.基于尺度不變特征變換(Scale-Invariant Feature Transform,SIFT)算法,自動選取測區內影像間的連接點,建立影像之間的約束關系,使用最小二乘方法,通過區域網平差干涉定標方法來校正所有影像的干涉參數(基線長度、基線傾角、相位偏移量)、求解連接點的三維坐標、求解影像的三維坐標.由設置的DOM/DSM像元大小,通過cubic convolution三次卷積插值方法對求得的平面坐標以及高程值進行插值處理,生成每景影像對應的DOM/DSM.通過拼接鑲嵌對所有影像進行拼接處理后,根據國家標準比例尺進行影像輸出.
利用機載InSAR生成DSM數據處理流程如圖3所示.
3.1干涉處理
干涉處理是生成DSM過程中的第一步,主要包括復圖像配準、預濾波、干涉圖生成、去平地效應、干涉圖濾波、相位解纏等步驟,本研究在處理過程中省略了預濾波與去平地效應這兩部分.
3.1.1復圖像配準與干涉圖生成
在生成DSM的整個過程中,主、輔圖像配準是最基礎、最關鍵的一步,其核心思想在于確定兩幅圖像之間匹配位置的相對偏移量.SAR影像配準不精確,將導致較大的干涉相位誤差.配準精度達到1/10像素才對干涉條紋圖的質量沒有明顯影響[15].常用匹配測度主要有3種:基于復數值的相似性測度、基于相位值的相似性測度和基于強度值的相似性測度[16].本研究利用基于FFT的復相關精確配準獲取同名點的精確偏移量,對匹配數據進行多項式擬合后計算主輔圖像對的坐標轉換關系,最后對輔圖像進行重采樣完成配準[17].配準后將主圖像的復數值與輔圖像的復數值進行共軛相乘后得到干涉圖.
3.1.2干涉圖濾波
由于SAR固有的斑點噪聲、雷達系統熱噪聲、雷達陰影、配準誤差等存在使得干涉圖存在很多相位噪聲,表現為相位不連續、周期性不明顯、相位條紋圖不明顯,給后續解纏造成很大影響[18-19].常用的濾波方法包括空間域濾波、頻率域濾波、時頻分析濾波,本研究利用Goldstein濾波[20]對干涉相位進行濾波,選取相互重疊的相位塊在頻率域采用平滑濾波器處理后,采用濾波參數對其功率譜進行處理.
3.1.3相位解纏
經干涉處理得到的干涉圖相位為相位主值,其值域在[0,2π]或[-π,π].為了獲取精確的地形高程信息,需要得到干涉圖對應的絕對干涉相位值.相位解纏采用一定的數學方法或者計算方法對干涉圖進行處理,得到各干涉相位之間相差的整周期數,從而獲取連續變化的干涉相位的過程[21-22].本研究提出了一種基于最小平衡樹(Minimum Balanced Trees,MBTs)的易于并行實現的快速、精確的解纏方法,利用高性能的GPU并行技術,構建最小平衡樹/林和推算解纏優先順序圖進行相位解纏[22-23].
3.2區域網平差
獲取DSM過程中,從POS中得到的系統參數會存在誤差,這些參數誤差會通過相高轉換、地理編碼等步驟傳遞到DSM中,影響DSM的精度,所以需要對這些參數進行定標處理.傳統的干涉參數定標方法基于GCPs對系統參數進行定標處理.假設對基線長度、基線傾角、相位偏移量進行定標,每景影像至少需要3個GCPs,適合小范圍并且易于布設控制點的區域.對于大范圍、多條帶或者不易布設控制點的區域(高山、丘陵、沼澤等),傳統的干涉參數定標的方法就不適用了.
因此本研究基于視向量正交分解算法構建三維重建模型,利用少量控制點和影像間的連接點,建立影像之間的約束關系,進行區域網平差處理[24-26],校正干涉參數與連接點坐標.
3.2.1連接點選取
基于SIFT算法[27-28]自動、快速選取測區內影像間的連接點.同一條帶內,滿足相干系數大于0.9,誤差小于0.5個像素的要求;條帶間,滿足誤差小于3個像素,同時可以通過人工復檢對誤差大于1個像素的連接點進行剔除.
3.2.2敏感度分析
由式(10)可得,影響DSM高程精度的系統參數有主天線相位中心高度H、斜距r、基線長度b、基線傾角α、絕對干涉相位φ、橫滾角θroll、俯仰角θpitch等.設這些參數的誤差分別為dh,dH,dr,db,dα,dφ,dθroll,dθpitch,假設系統參數之間相互不影響,由協方差傳播定律可以得:
σ2h=dhdH2σ2H+dhdr2σ2r+dhdb2σ2b+dhdα2σ2α+dhdφ2σ2φ+dhdθroll2σ2θroll+dhdθpitch2σ2pitch, (12)
其中:
dhdH=1, (13)
dhdr=-cosθ+lλ2φ28π2rb2-b2r, (14)
dhdb=rl12r+λφ2πb2+λ2φ28π2rb2, (15)
dhdα=rlcos2β-sin2θ1, (16)
dhdφ=rl-λ2πb-λ2φ4π2rb, (17)
dhdθroll=-rlcos2β-sin2θ1, (18)
dhdθpitch=r[sinθpitchcos(α-θroll)cos2β-sin2θ1-sinθpitchsin(α-θroll)sinθ1], (19)
其中系數l為
l=cosθpitchcos(α-θroll)sinθ1+sin(α-θroll)cosθ1cosθ1. (20)
為了分析各個參數與地面點高程之間的敏感度,設橫滾角為0.023°,俯仰角為0.649°,偏航角為2.254°,視角范圍為20°~70°,平臺高度為4 043.116 m,地面點參考高程為900 m,敏感度分析結果如圖4所示.
如圖4所示,隨著視角的增加,基線長度、基線傾角、橫滾角敏感度值為103級,遠大于其他參數.由于載機搭載高精度的POS AV610,可以精確地計算載機的相位中心高度H、斜距r.同時俯仰角誤差對DSM高程影響很小,可以忽略不計.橫滾角可以通過校正基線傾角以消除它對高程的影響.同時由于系統噪聲影響,解纏相位與真實相位之間存在常數差,即相位偏移量,必須對其進行精確定標處理.因此需要對每個干涉像對的基線長度、基線傾角、相位偏移量進行區域網平差定標處理.
3.2.3區域網平差
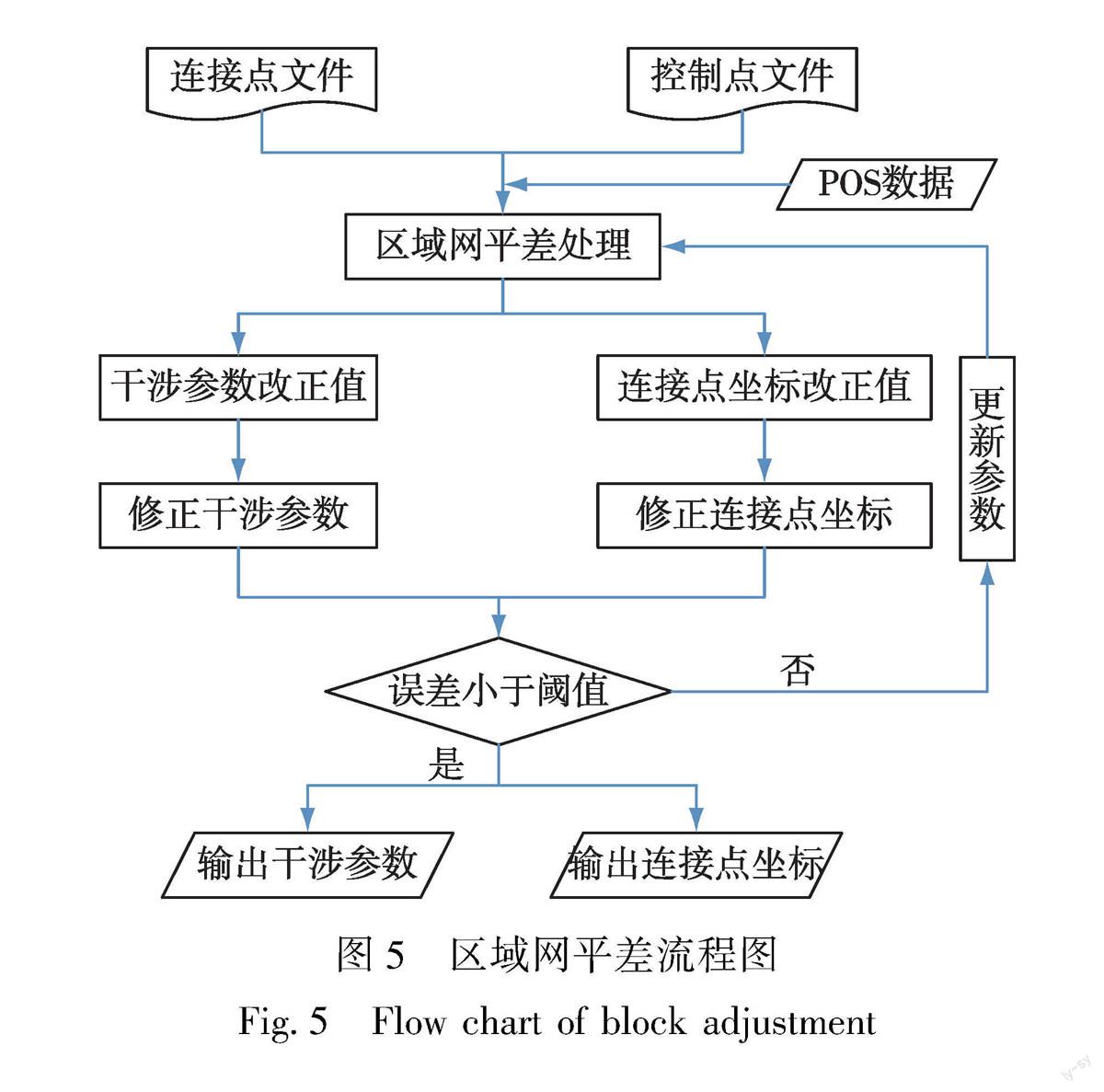
區域網平差流程如圖5所示.
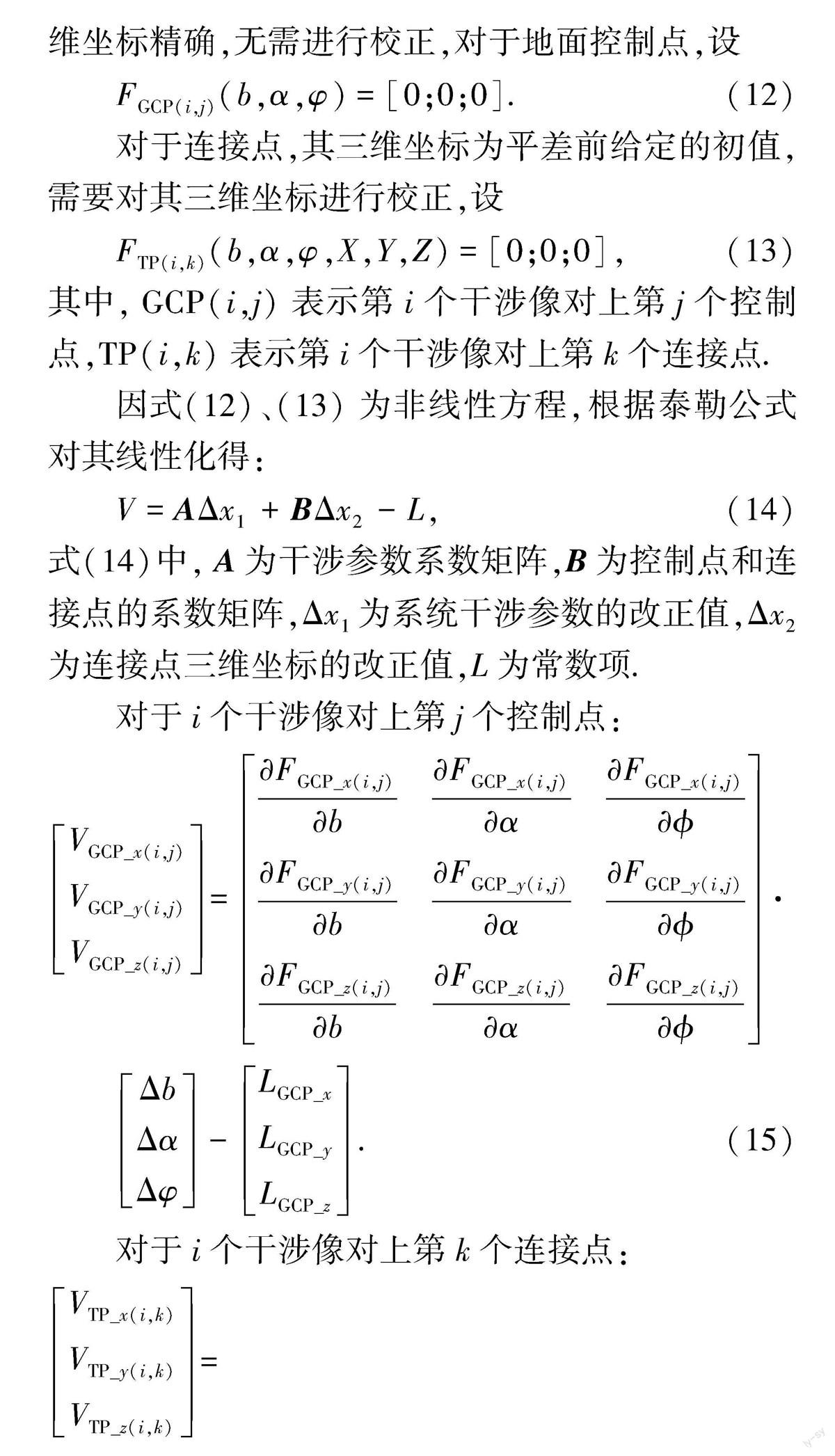
平差處理過程中認為地面控制點(角反射器)三維坐標精確,無需進行校正,對于地面控制點,設
FGCP(i,j)(b,α,φ)=[0;0;0]. (12)
對于連接點,其三維坐標為平差前給定的初值,需要對其三維坐標進行校正,設
FTP(i,k)(b,α,φ,X,Y,Z)=[0;0;0], (13)
其中,GCP(i,j)表示第i個干涉像對上第j個控制點,TP(i,k)表示第i個干涉像對上第k個連接點.
因式(12)、(13)為非線性方程,根據泰勒公式對其線性化得:
V=AΔx1+BΔx2-L, (14)
式(14)中,A為干涉參數系數矩陣,B為控制點和連接點的系數矩陣,Δx1為系統干涉參數的改正值,Δx2為連接點三維坐標的改正值,L為常數項.
對于i個干涉像對上第j個控制點:
VGCP_x(i,j)VGCP_y(i,j)VGCP_z(i,j)=
FGCP_x(i,j)bFGCP_x(i,j)αFGCP_x(i,j)
FGCP_y(i,j)bFGCP_y(i,j)αFGCP_y(i,j)
FGCP_z(i,j)bFGCP_z(i,j)αFGCP_z(i,j)·
ΔbΔαΔφ-LGCP_xLGCP_yLGCP_z. (15)
對于i個干涉像對上第k個連接點:
VTP_x(i,k)VTP_y(i,k)VTP_z(i,k)=
FTP_x(i,k)bFTP_x(i,k)αFTP_x(i,k)
FTP_y(i,k)bFTP_y(i,k)αFTP_y(i,k)
FTP_z(i,k)bFTP_z(i,k)αFTP_z(i,k)
ΔbΔαΔ-LTP_x(i,k)LTP_y(i,k)LTP_z(i,k)-ΔXTP(i,k)ΔYTP(i,k)ΔZTP(i,k). (16)
基于最小二乘原理,求解方程時先消去未知數較多的連接點三維坐標的改正數,求解系統干涉參數的改正量,再消去系統干涉參數改正量,求解連接點的坐標,采用迭代以及逐步趨近的方法求解模型參數.
本研究利用少量控制點和大量連接點對貴州施秉試驗區、四川邛崍試驗區進行區域網平差處理,求解得到了每個區域中每景影像對應的系統干涉參數與連接點三維坐標.
3.3地理編碼與拼接鑲嵌
根據區域網平差與相高轉換得到的每景影像對應的三維坐標,根據DOM/DSM所需分辨率(本研究設置為0.5 m),去除影像周邊50像素的邊緣值,根據相干閾值(本研究設置為0.6),采取re_ts6p插值方式對DOM/DSM進行插值計算,得到分辨率為0.5 m的DOM和格網間距為0.5 m的DSM.
對測區內所有的DOM/DSM進行拼接鑲嵌處理,對于拼接后的DOM/DSM存在拼接縫的情況要進行去縫處理;對于拼接后DOM在拼接處兩側顏色不均勻的情況要根據直方圖匹配的方法進行勻色.
4試驗結果和分析
4.1試驗結果
本研究利用自主研發的機載InSAR數據處理軟件AirborneInSARMap,基于干涉處理、區域網平差、地理編碼、拼接鑲嵌等流程快速、精確地生成了貴州施秉試驗區和四川邛崍試驗區0.5 m分辨率的DOM以及格網間距為0.5 m的DSM,分別如圖6、圖7所示.
4.2精度驗證
為了驗證生成DSM的精度,本研究分別利用12、13個地面控制點(角反射器)對生成的DSM的X,Y以及H 3個方向進行驗證,2個試驗區驗證結果如圖8所示.
由圖8可得,貴州施秉試驗區3個方向的平均值分別為0.588、-0.534和0.340 m,RMSE分別為1.490、0.938和1.433 m;四川邛崍試驗區3個方向的平均值分別為-0.049、0.075和-0.304 m,RMSE分別為1.410、2.156和1.846 m.2個試驗區的平面定位誤差和高程中誤差均滿足1∶5 000地形圖制圖要求[29].
5結論
本研究利用自主研發的機載InSAR數據處理軟件AirborneInSARMap生成了貴州施秉試驗區(丘陵、山地)和四川邛崍試驗區(高山地)高精度的DOM與DSM,并利用控制點進行了精度驗證與分析,得出以下結論:
1)通過對2個實驗區精度驗證,高程中誤差可以滿足1∶5 000地形圖制圖精度要求,表明機載雙天線毫米波InSAR具備生成不同地形條件的DOM/DSM的能力,為困難區域DOM/DSM獲取提供了新的技術手段.
2)基于GPU并行處理技術,利用最小平衡樹解纏方法進行相位展開,極大提高了解纏的效率.
3)基于視向量正交分解算法,利用SIFT算法自動選取測區內的連接點以及測區內少量控制點,通過區域網平差對各干涉像對的基線長度、基線傾角和相位偏移量進行了定標,提高了DOM/DSM的精度.
本研究在數據處理過程中也存在一些不足:由于山區地帶存在大量陰影及疊掩,會導致解纏效果不理想,最終影響生成DSM的精度;對于由陰影與疊掩導致的黑洞問題,可以采用插值和對飛處理將DSM補全.
參考文獻
References
[1]Sun Z C,Guo H D,Li X W,et al.DEM generation and error analysis using the first Chinese airborne dual-antenna interferometric SAR data[J].International Journal of Remote Sensing,2011,32(23):8485-8504
[2]孫中昶,郭華東,李新武.機載雙天線InSAR數據生成高精度DEM的誤差分析[J].高技術通訊,2012,22(2):171-179
SUN Zhongchang,GUO Huadong,LI Xinwu.Error analysis of high-precision DEM generated from airborne dual-antenna interferometric SAR data[J].Chinese High Technology Letters,2012,22(2):171-179
[3]張琦,張雷,郭俊棟,等.基于無人飛行平臺的小型Ka波段合成孔徑雷達系統研制[J].地球信息科學學報,2019,21(4):524-531
ZHANG Qi,ZHANG Lei,GUO Jundong,et al.Development of Ka-band miniature synthetic aperture radar based on UAV[J].Journal of Geo-Information Science,2019,21(4):524-531
[4]Rogers A E E,Ingalls R P.Venus:mapping the surface reflectivity by radar interferometry[J].Science,1969,165(3895):797-799
[5]Zebker H A,Goldstein R M.Topographic mapping from interferometric synthetic aperture radar observations[J].Journal of Geophysical Research Atmospheres,1986,91(B5):4993-4999
[6]牛瑞,袁軍.國外機載InSAR系統發展現狀及應用分析[J].測繪科學與工程,2011(3):70-74
NIU Rui,YUAN Jun.Development and application analysis of airborne InSAR system abroad[J].Geomatic Science and Engineering,2011(3):70-74
[7]Nuri A L N.Mapping of large areas in tropical countries by using high resolution airborne interferometric radar[C]∥ISPRS,2000
[8]王聰.編隊干涉SAR對地測繪任務規劃方法研究[D].哈爾濱:哈爾濱工業大學,2014
WANG Cong.Research on the scheduling method of the formation flying InSAR mapping mission[D].Harbin:Harbin Institute of Technology,2014
[9]Mercer B.DEMs created from airborne IFSAR:an update[J].International Archives of Photogrammetry and Remote Sensing,2004,35(part B)
[10]Xiang M S,Wu Y R,Li S E,et al.Introduction on an experimental airborne InSAR system[C]∥Proceedings of IEEE International Geoscience and Remote Sensing Symposium,2005,7:4809-4812
[11]Li D J,Liu B,Pan Z H,et al.Airborne MMW InSAR interferometry with cross-track three-baseline antennas[C]∥9th European Conference on Synthetic Aperture Radar,2012:301-303
[12]師君,馬龍,韋順軍,等.基于導航數據的Ka波段InSAR成像處理與分析[J].雷達學報,2014,3(1):19-27
SHI Jun,MA Long,WEI Shunjun,et al.Ka-band InSAR imaging and analysis based on IMU data[J].Journal of Radars,2014,3(1):19-27
[13]Madsen S N,Zebker H A,Martin J.Topographic mapping using radar interferometry:processing techniques[J].IEEE Transactions on Geoscience and Remote Sensing,1993,31(1):246-256
[14]Li Y W,Xiang M S,Lü X L,et al.Joint interferometric calibration based on block adjustment for an airborne dual-antenna InSAR system[J].International Journal of Remote Sensing,2014,35(17):6444-6468
[15]張登榮,俞樂.一種高精度的干涉雷達復數影像配準方法[J].遙感學報,2007,11(4):563-567
ZHANG Dengrong,YU Le.A high-precision co-registration method for InSAR image processing[J].Journal of Remote Sensing,2007,11(4):563-567
[16]馬凱,王仁禮,楊慶慶,等.機載InSAR圖像配準算法比較研究[J].地理信息世界,2016,23(4):50-53
MA Kai,WANG Renli,YANG Qingqing,et al.The comparison of co-registration algorithms of airborne InSAR image[J].Geomatics World,2016,23(4):50-53
[17]孫中昶,郭華東,焦孟梅,等.機載雙天線InSAR復圖像自動配準研究[J].國土資源遙感,2010,22(1):24-29
SUN Zhongchang,GUO Huadong,JIAO Mengmei,et al.The automatic registration of airborne dual-antenna interferometric SAR complex images[J].Remote Sensing for Land & Resources,2010,22(1):24-29
[18]張斌,胡慶榮,韋立登,等.改進的形態學干涉圖濾波方法[J].系統工程與電子技術,2018,40(10):2230-2236
ZHANG Bin,HU Qingrong,WEI Lideng,et al.Improved morphological filtering algorithm of interferograms[J].Systems Engineering and Electronics,2018,40(10):2230-2236
[19]Ambrosino R,Baselice F,Ferraioli G,et al.Extended Kalman filter for multichannel InSAR height reconstruction[J].IEEE Transactions on Geoscience and Remote Sensing,2017,55(10):5854-5863
[20]Goldstein R M,Werner C L.Radar interferogram filtering for geophysical applications[J].Geophysical Research Letters,1998,25(21):4035-4038
[21]Goldstein R M,Zebker H A,Werner C L.Satellite radar interferometry:two-dimensional phase unwrapping[J].Radio Science,1988,23(4):713-720
[22]Gao J,Sun Z C.Phase unwrapping method based on parallel local minimum reliability dual expanding for large-scale data[J].Journal of Applied Remote Sensing,2019,13(3):038506
[23]Jian G.Reliability-map-guided phase unwrapping method[J].IEEE Geoscience and Remote Sensing Letters,2016,13(5):716-720
[24]張薇,向茂生,吳一戎.基于三維重建模型的機載雙天線干涉SAR外定標方法及實現[J].遙感技術與應用,2009,24(1):82-87
ZHANG Wei,XIANG Maosheng,WU Yirong.Realization of outside calibration method based on the sensitivity equation for dual-antenna airborne interferometric SAR[J].Remote Sensing Technology and Application,2009,24(1):82-87
[25]Jin G W,Xiong X,Xu Q,et al.Baseline estimation algorithm with block adjustment for multi-pass dual-antenna insar[J].ISPRS-International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2016,XLI-B7:39-45
[26]Yue X J,Han C M,Dou C Y,et al.Research on block adjustment of airborne InSAR images[J].IOP Conference Series:Earth and Environmental Science,2014,17:012199
[27]Lowe D G.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-110
[28]Schwind P,Suri S,Reinartz P,et al.Applicability of the SIFT operator to geometric SAR image registration[J].International Journal of Remote Sensing,2010,31(8):1959-1980
[29]孫曉云,王曉東,苗小利.INSAR干涉處理獲得DSM的產品質量分析[J].礦山測量,2015(4):72-75
SUN Xiaoyun,WANG Xiaodong,MIAO Xiaoli.Product quality analysis of DSM obtained by INSAR interference processing[J].Mine Surveying,2015(4):72-75
On topographic surveying in tough areas using airborne millimeter-wave InSAR
WEI Lideng1LI Yongjie2,3SUN Zhongchang2,4GAO Jian5
1Beijing Institute of Radio Measurement,Beijing100854
2Key Laboratory of Digital Earth Science,Aerospace Information Research Institute,Chinese Academy of Sciences,Beijing100094
3School of Land Science and Technology,China University of Geosciences,Beijing100083
4Hainan Provincial Key Laboratory of Earth Observation,Sanya572029
5School of Geographic and Biologic Information,Nanjing University of Posts and Telecommunications,Nanjing210003
AbstractInterferometric synthetic aperture radar (InSAR) has become one of the key technologies to obtain high-precision Digital Orthophoto Map (DOM) and Digital Surface Model (DSM).It is not affected by weather conditions and can acquire data in all day and weather conditions.Airborne dual-antenna millimeter-wave InSAR is independent of loss-of-correlation which has the characteristics of small size,high resolution,high flexibility,etc.And it can obtain large-scale and high-precision images.This paper uses airborne dual-antenna millimeter-wave InSAR to acquire high-precision DOM and DSM in Shibing experimental area of Guizhou (mountainous) and Qionglai experimental area of Sichuan (alpine) through interference processing,block adjustment,geocoding,and image mosaic.Besides,the ground control points (GCPs) are used to verify the accuracy.The results show that the accuracy of DSM obtained meets the requirement of 1:5000 terrain mapping.It has been proven that the airborne dual-antenna millimeter-wave InSAR has the ability to generate DOM/DSM with different terrains,which provides a new technical means for solving the lack of DOM/DSM data in tough areas.
Key wordsairborne millimeter-wave InSAR;block adjustment;high precision;digital surface model (DSM);digital orthophoto map (DOM)
收稿日期2019-10-21
資助項目海南省重點研發計劃項目(ZDYF2019008)
作者簡介韋立登,男,博士,研究員,主要研究方向為干涉合成孔徑雷達成像處理技術、運動補償技術、自動配準技術、干涉處理技術等.koridge@163.com
孫中昶(通信作者),男,博士,副研究員,主要研究方向為城市遙感、微波遙感等.sunzc@aircas.ac.cn
1北京無線電測量研究所,北京,100854
2中國科學院空天信息創新研究院/數字地球重點實驗室,北京,100094
3中國地質大學土地科學技術學院,北京,100083
4海南省地球觀測重點實驗室,三亞,572029
5南京郵電大學地理與生物信息學院,南京,210003
