基于單片機C8051F500的無刷直流電機控制研究
2020-06-01 12:44:12張揚,王聰,張雷
微處理機 2020年3期
張 揚,王 聰,張 雷
(中國電子科技集團公司第四十七研究所,沈陽110032)
1 引言
無刷直流電機自誕生以來,因其具有交流電機結構簡單、維護容易、性能穩定可靠等優點,同時兼有直流電機無勵磁損耗、運行效率高以及調速性能好等優點,還克服了直流電機由于機械換相和電刷而帶來的一系列弊端,因此被廣泛應用于各種調速場合[1]。在國民經濟的各個領域中它得到越來越廣泛的應用,如工業控制、汽車電子產品、電動車、電冰箱、洗衣機、電風扇、空調等家電器產品。在航空航天和軍工方面也有大量應用,如航天飛機、電傳動裝甲車輛和魚雷等。
2 無刷直流電機控制理論
普通直流電機的電樞通常在轉子上,定子用于產生固定不變的磁場,需要通過換向器與電刷不間斷的改變電流方向,確保兩個磁場的方向一直處于垂直狀態,產生恒定的轉矩,從而驅動轉子不斷旋轉,實現電機轉動。
為減小電刷上的損耗,設計定子由電樞組成,轉子由永磁鐵組成,實現電機從有刷變為無刷。定子中電樞按照一定時序通入直流電,使定子中電樞產生的變化磁場始終與轉子中永磁鐵產生的磁場保持90°左右的空間角,產生的轉矩帶動轉子不斷旋轉,從而實現無刷直流電機工作。在綜合考慮無刷直流電機構成、轉矩波動、繞組整體使用效率以及控制電路成本等因素前提下,研究選取了一種三相星形全橋驅動的方式,其原理圖如圖1所示。
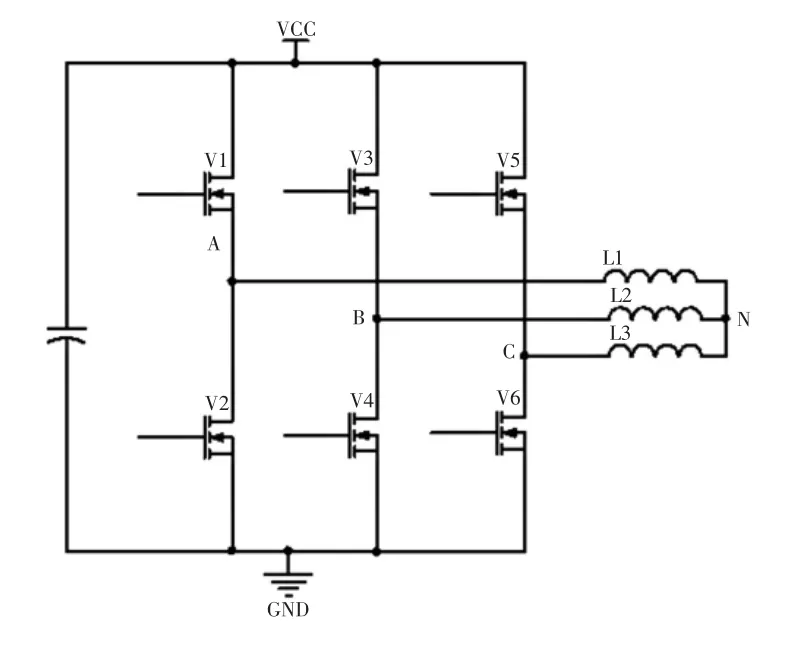
圖1 三相星形全橋驅動原理圖
通過監測轉子所處的不同位置,對應生成有序的控制信號,用于控制開關管V1~V6的導通與關斷,確保任意時刻三項繞組中兩項導通,定子與轉子產生的磁場始終相互作用,使電機處于工作狀態。
3 仿真分析
3.1 MATLAB/Simulink仿真
在MATLAB/Simulink環境下搭建無刷直流電機控制系統仿真模型,如圖2所示。仿真模型主要由6個模塊組成:逆變電路模塊、電機本體模塊、電流檢測模塊、轉速調節模塊、電流調節模塊、負載模塊。
仿真系統采用雙閉環控制策略,內環為電流環,外環為速度環。主電路采用三相全橋式電路,選擇120°兩兩導通方式。在直流調速控制系統中,電流、轉速雙閉環控制具有動態響應快與抗干擾能力強兩個突出特點,是應用最為廣泛的一種控制方式。采用無刷直流電機控制器一方面能夠減小轉速與設定值之間的誤差,另一方面當負載發生變化時能起到抗干擾的作用,使整個系統工作在穩定狀態。
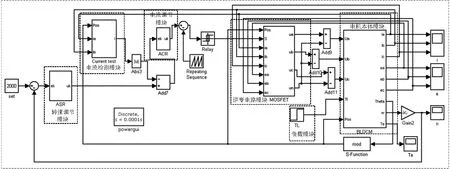
圖2 無刷直流電機雙閉環控制系統仿真模型
電流調節器的作用是:當電壓發生變化時,使電流只跟隨著負載變化,當電網波動時,能夠起到抗干擾的作用;使其動態過程加快;當發生過載或者堵轉時,加快自保護的能力[2]。
3.2 仿真波形
電機定子電樞中三相繞組的電流波形圖如圖3所示,三組波形為相位差為120°的方波,其導通邏輯順序與理論依據相符。
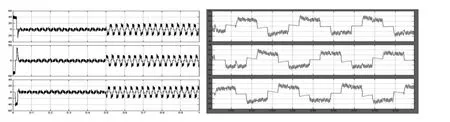
圖3 電機定子電樞中三相繞組的電流波形圖
電機轉速波形如圖4所示,空載時電機能夠在0.03s內快速升至設定值2000r/min。負載在0.5s處發生突變,由0N·m迅速升至1N·m,電磁轉矩依據電機運動方程增加了1N·m。電機轉速幾乎沒有發生改變,繼續維持在設定值上下,該控制系統在穩態、動態運行性能上有良好的表現。
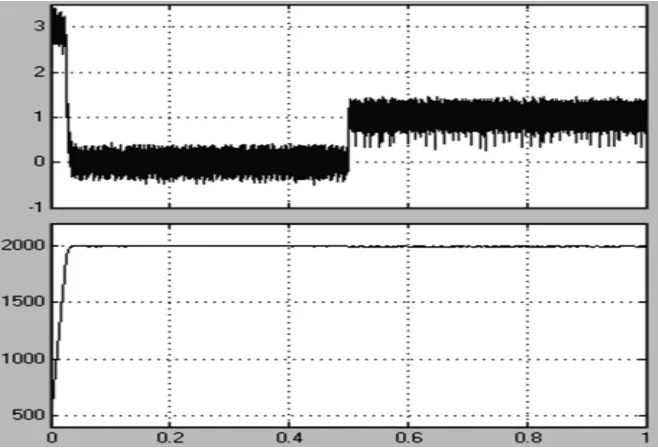
圖4 電機轉速波形圖
4 硬件及軟件設計
隨著高性能微處理器的不斷涌現,目前基于現場可編程門陣列FPGA、數字信號處理器DSP、ARM、高性能單片機及專用芯片等微處理器的電路研究應用已經成為電機調速領域的主流[3]。
本控制系統的總體構成框圖如圖5所示。控制電路由主控芯片C8051F500與電機專用芯片MC33035、MC33039構成。主控芯片C8051F500對無刷直流電機進行啟動停止、正反轉、調速、轉速顯示等控制。霍爾位置傳感器的反饋信號經MC33035邏輯變換后生成六路輸出控制信號送到逆變電路,控制逆變功率開關管以一定規律導通與關斷,使電機定子電樞按照一定電度角,產生不間斷步進的磁勢,從而帶動電機轉子旋轉,實現無刷直流電機的工作。MC33039可以將霍爾位置傳感器的反饋信號轉換成一組正比于電機轉速的脈沖信號,配合MC33035構成閉環控制系統。
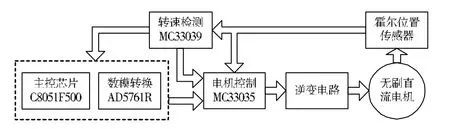
圖5 無刷直流電機系統控制框圖
4.1 專用芯片MC33035與MC33039
MC33035是由美國安森美生產的一種高性能第二代單片無刷直流電機專用控制器,可用于三相或四相電機的控制系統,實現全開環的全部動力控制功能[4]。
MC33035芯片內部結構框圖如圖6所示。引腳4、5、6用于接收轉子位置信號,通過轉子位置解碼器等電路轉換成控制信號,一部分用于控制三個集電極開路的高速驅動輸出電路,另一部分用于控制三個圖騰柱低速驅動輸出電路。引腳10內部振蕩器的頻率可以通過RT、CT的值設定。引腳11輸入一個電壓信號,用于控制電機轉速。下橋控制信號、鋸齒波振蕩頻率、轉速設定值共同在PWM比較器輸出端生成PWM控制信號,用于控制圖騰柱電路中的場效應管。芯片內部還包含限流電路,故障輸出電路,具有溫度補償的6.25V內部基準電路。
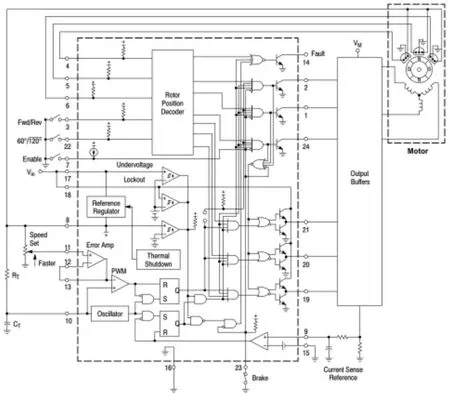
圖6 MC33035芯片內部結構框圖
MC33039是由美國安森美生產的一款高性能的閉環速度控制芯片,專用于各種無刷直流電機控制系統中,無需專門的磁性或光學轉速計就能完成精確的速度控制[5]。芯片內部結構框圖如圖7所示。
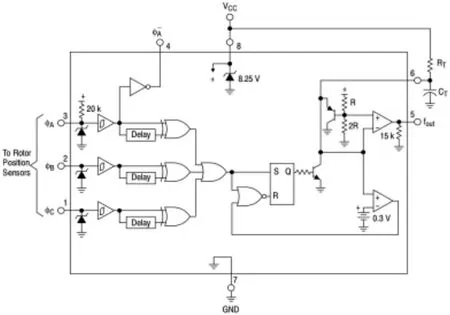
圖7 MC33039芯片內部結構框圖
芯片內包含三個數字信號邊沿檢測器、一個內部并聯調節器、一個可編程單穩態以及一個輸出變換器。輸入端起緩沖作用的延時器可提高芯片抗干擾能力。MC33039的1、2、3引腳用于接收霍爾傳感器生成的三個位置信號,經帶有滯后的緩沖電路來抑制輸入噪聲,通過單穩態電路(RT、CT)設定內部時鐘,再經或運算生成相當于電機每對極下的脈沖信號。5引腳輸出的信號是位置信號經過F/V(頻率/電壓)變換生成的與電機轉速成正比的脈沖信號。
4.2 逆變電路與電機驅動控制
逆變電路原理圖如圖8所示。上橋開關管選擇三只 P-Channel MOSFET(IRF9Z34NL),下橋開關管選擇三只N-Channel MOSFET(IRL520NS)。電機控制芯片MC33035上部三個集電極開路驅動器用于驅動三只P-Channel MOSFET,下部三個大電流圖騰柱電路用于驅動三只N-Channel MOSFET。
電機驅動控制原理如圖9所示,其中專用芯片MC33035、MC33039與六只MOSFET和霍爾位置傳感器構成一個閉環系統,用于提供驅動時序和提供功率驅動[6]。
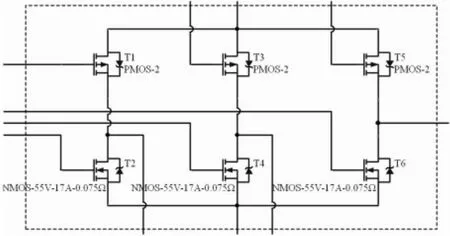
圖8 逆變電路原理圖
通過將電阻串聯在三相繞組中,獲取電機總的工作電流,將該電流值以電壓的形式反饋至芯片內部,從而實現逐周期的電流保護,保護電機工作電流不超過設計值。
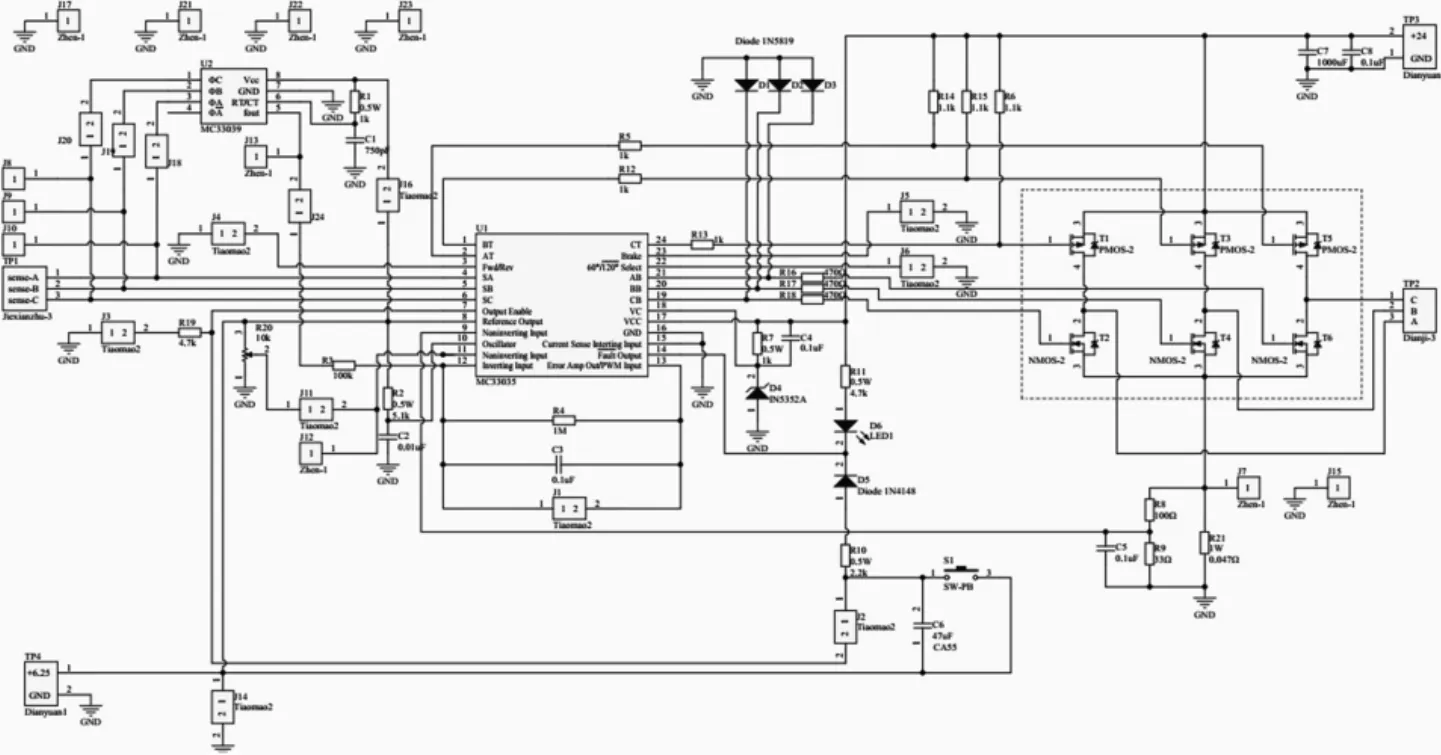
圖9 基于MC33035、MC33039構建電機驅動控制原理圖
4.3 控制板與實驗平臺
直流電機控制板如圖10所示,對電機調速方式采用PWM脈寬調制。采用H-on_L-pwm調制方式(上橋開關管開啟,下橋開關管脈沖寬度調制),此種斬波方式能夠產生較小的換相轉矩脈動[7]。
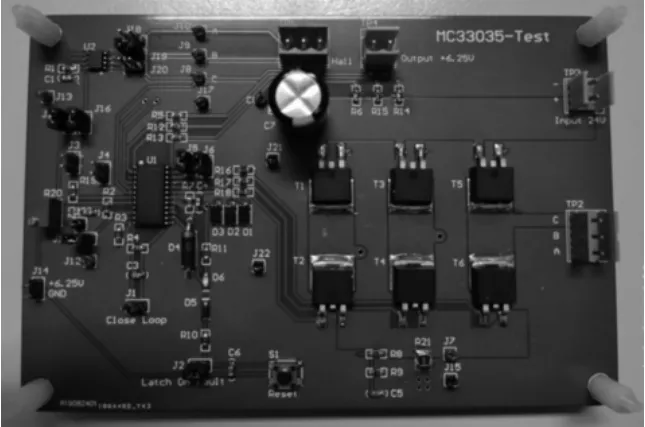
圖10 無刷直流電機控制板
系統實驗平臺如圖11所示,通過直流電源GPD-3303S為整個系統進行供電,實驗控制板對電機進行控制。
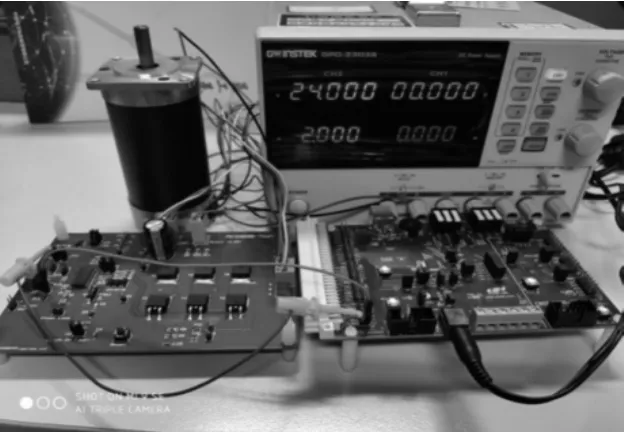
圖11 基于C8051F500、MC33035控制系統實驗平臺
整個控制系統以C8051F500單片機[8]為控制核心,根據無刷直流電機霍爾位置傳感器反饋的位置信號實時檢測電機的轉速信息,并將實時轉速值與設定轉速值進行比較,其差值作為轉速環的輸入值。該輸入值經過電機專用驅動芯片MC33035,專用控制芯片通過PWM方式調整定子電樞中的平均電壓,從而將轉速穩定在設定值。采用逐周期電流限制可有效防止電機過載運行導致過熱損壞。監控每次輸出開關導通時間內建立的定子電流實現逐周期電流限制,在檢測到過電流時,立即關閉開關管,從而保護電機。
通過單片機P1.1引腳連接MC33035引腳3實現電機正反轉控制。當P1.1引腳輸出高電平時,電機正轉,當輸出為低電平時,電機反轉。
通過單片機P1.2引腳連接MC33035引腳7實現電機啟動/停止控制。當P1.2引腳輸出高電平時,驅動輸出電路正常工作,當輸出為低電平時,高邊驅動輸出關閉,底邊驅動強制為低電平,電機停轉。使能控制可以實現電機平穩啟動/停止控制功能。
通過單片機P1.3引腳連接MC33035引腳23實現電機制動控制。當P1.3引腳輸出高電平時,電機進行能耗制動。芯片內部有一個四輸入的或非門電路,當輸出信號為制動信號和高邊驅動輸出信號時,待檢測上橋驅動輸出確實為高電平之后,低邊三個低速驅動輸出才為高電平狀態,避免出現上、下橋同時導通燒毀開關管與電機的情況。緊急制動會產生較大的瞬態沖擊,合理泄放存貯能量,保證安全。
當電機出現故障時,可通過MC33035引腳14輸出一低電平,將該引腳連接一只發光二極管,作為故障指示燈。同時,控制系統能夠實現檢測電機轉速、設定電機轉速、正反轉切換、使能、緊急制動、過流保護、欠壓鎖定、故障報警等功能。
4.4 PC機與單片機的通訊
上位機界面控制程序是人機交互界面,采用Microsoft Visual Studio 2005軟件進行上位機程序的編寫,上位機計算機(PC)與下位機單片機(MCU)進行串口通信,實現控制命令與反饋信號的傳輸。
圖12為單片機與PC通信界面,當設定電機轉速為220轉/分時,電機實時轉速如圖13所示。
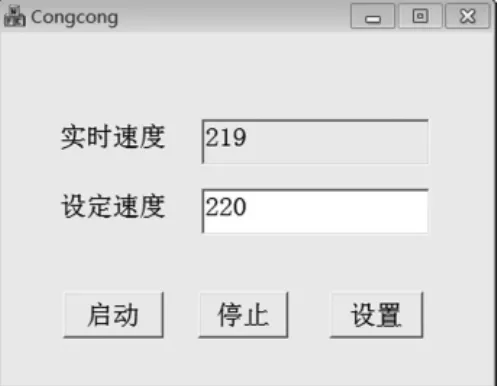
圖12 單片機與PC機通信界面
5 結束語
使用C8051F500、MC33035與MC33039芯片控制的無刷直流電機閉環控制系統具有電路結構簡單,可靠性高,穩定性好,成本低,抗干擾強等優點,適用于小功率無刷直流電機的控制。

圖13 轉速表轉速顯示
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
