某型公務機襟翼控制系統設計載荷分析
2020-06-03 02:21:22劉國慶
科學技術創新 2020年5期
劉國慶
(廣東省珠海市中航通飛研究院有限公司,廣東 珠海519040)
1 襟翼控制系統架構
某型公務機在左、右機翼后緣各設置了一片襟翼來改善飛機的起降性能,增加飛機的升力與阻力[1],其采用簡單定軸式襟翼,襟翼轉軸位于機翼下方。襟翼具有0 度(UP 位)、20 度(T/O位)、35 度(LAND 位)三種構型,見圖1 所示。
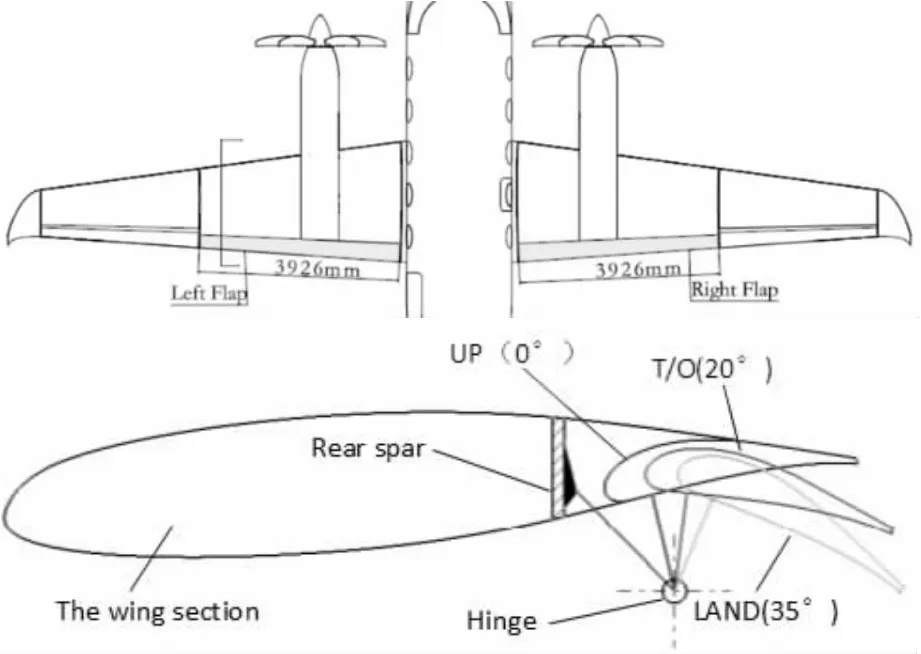
圖1 襟翼構型示意圖
襟翼控制系統的組成包括:
a.襟翼控制手柄:用于接收飛行員驅動襟翼的指令并將指令傳送至襟翼控制系統中。b.襟翼控制盒:用于接受襟翼控制手柄的指令,在經過一系列的邏輯運算后對襟翼驅動裝置發出驅動指令,該控制盒綜合了襟翼控制系統的所有信息處理。c.中央驅動裝置(PDU):將飛機的能源(電能或液壓)轉化為機械能來驅動襟翼的偏轉。d.軟軸:將中央驅動裝置(PDU)的機械位移及力矩傳遞到襟翼作動器。e.襟翼作動器:與襟翼操縱搖臂相連,接受到軟軸傳過來的機械位移及力矩后,驅動襟翼的偏轉。襟翼控制盒(Electronic Control Unit)在接受到襟翼操縱手柄(Flap Knob)的動作指令后經過邏輯運算,向中央驅動裝置(PDU)發送驅動指令信號,中央驅動裝置(PDU)動作并通過軟軸(Flexible Shaft)將位移及力矩傳遞至左右襟翼的四個作動器(Actuator)上,作動器上集成有力矩限制器(Torque Limiter)及位置測量裝置(Position sensor);襟翼控制盒將襟翼的實時位置及狀態通過429 總線傳送至航空電子系統(Avionics),將襟翼手柄的位置及襟翼的位置實時傳輸至飛參記錄儀(FDR)。襟翼控制系統的架構見圖2。
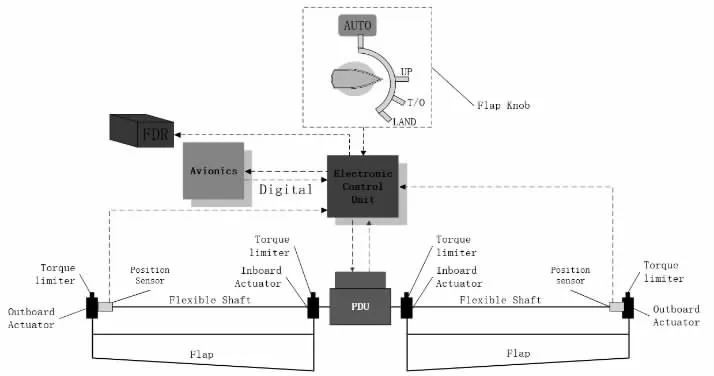
圖2 襟翼控制系統架構
2 襟翼控制系統載荷分析
在進行襟翼的載荷計算時,需要用到的適航條款如下:第23.345 (d)[2]襟翼、其操縱機構及其支撐結構必須設計成能承受本條(a)規定的情況。此外,在速度VF、襟翼完全伸展時,必須分別考慮下述情況:(1)速度為7.60 米/秒(25 英尺/秒)(EAS)的迎面突風與75%的最大連續功率所對應的螺旋槳滑流同時作用;(2)最大起飛功率所對應的螺旋槳滑流影響。
2.1 襟翼作動器最大操作載荷。飛機氣動專業根據風洞試驗數據,按照適航條款要求計算出襟翼的最大操作載荷并提交給強度專業,由強度專業通過有限元建模分析后將襟翼的最大操作載荷分配到襟翼內、外作動器上,該載荷作為計算中央驅動裝置輸出功率的依據。設計流程見圖3。
2.2 力矩限制器載荷。通常中央驅動裝置所發出的最大載荷都會大于襟翼的正常偏轉的氣動載荷,在故障情況下,例如襟翼傳動線系一側卡阻,那么中央驅動裝置的所有載荷都會施加在卡阻一側襟翼的作動器上。因此需要在襟翼作動器上增加力矩限制器,防止過多的載荷被施加在襟翼及其支撐機構上。作動器中力矩限制器的嚙合范圍的設計流程見圖4 所示,其中力矩限制器載荷上限取經驗值15%的力矩限制器載荷下限,15%的經驗系數需根據工業上碟簧的特性確定,供應商希望該值越大越好,這樣更利于碟簧的選擇,但該數值越大,襟翼系統需承受的載荷也就越大,這對飛機的重量不利;若該值選得過小,那么力矩限制器選擇困難且受環境因素影響較大。
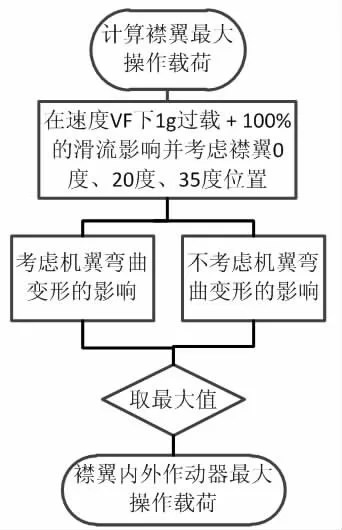
圖3 襟翼作動器最大操作載荷
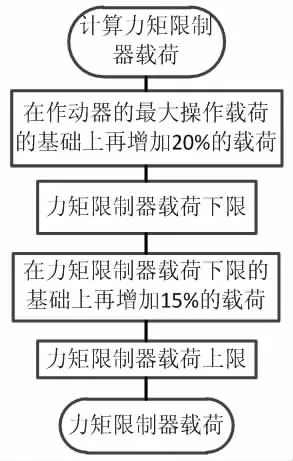
圖4 力矩限制器載荷
2.3 襟翼作動器設計載荷。該載荷主要考慮在襟翼設計速度VF 作用下且飛機遭受迎面突風,同時襟翼還受到發動機最大連續功率所產生的75%的滑流共同作用下襟翼作動器能承受的載荷,作動器設計載荷的設計流程見圖5 所示。
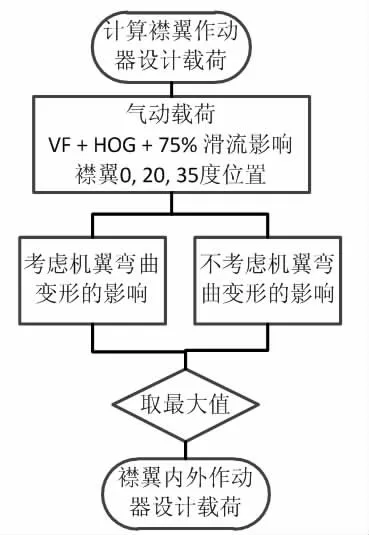
圖5 襟翼作動器設計載荷
2.4 故障狀態下作動器載荷。在計算故障狀態下襟翼作動器的載荷時,應全面的窮舉襟翼控制系統以及襟翼結構在預期的運行環境下可能出現的各種故障工況。以該公務機的左襟翼為例,計算故障狀態下的襟翼作動器載荷。襟翼懸掛及作動器布置見圖6,襟翼控制系統各種故障狀態下的載荷工況。
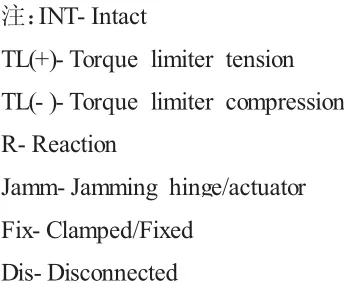
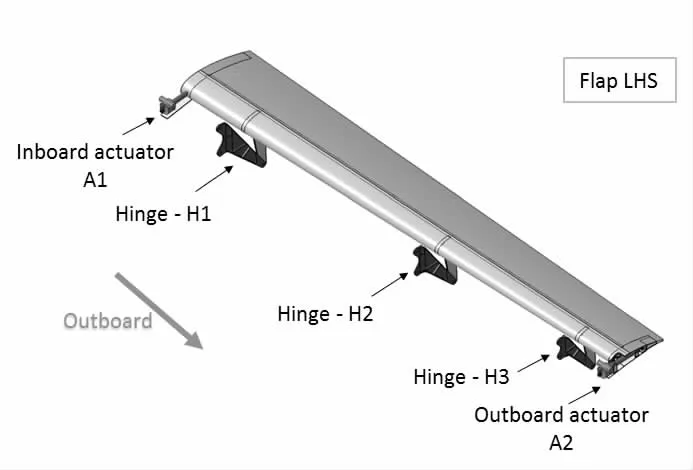
圖6 襟翼懸掛及作動器布置
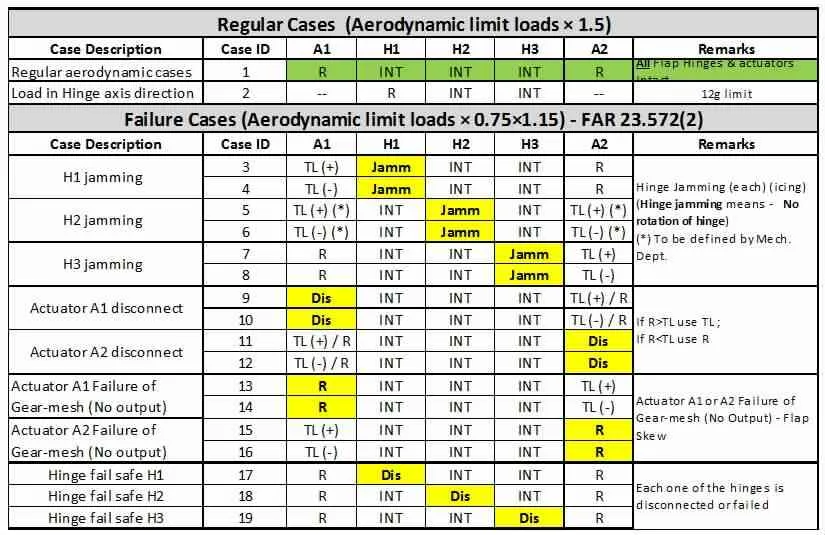
表1 襟翼控制系統故障狀態
2.5 襟翼作動器極限載荷。襟翼作動器的極限載荷為作動器能承受的在實際情況中可能出現的最大靜載,這時襟翼作動器保持靜止、不動作,作動器極限載荷設計流程見圖7。
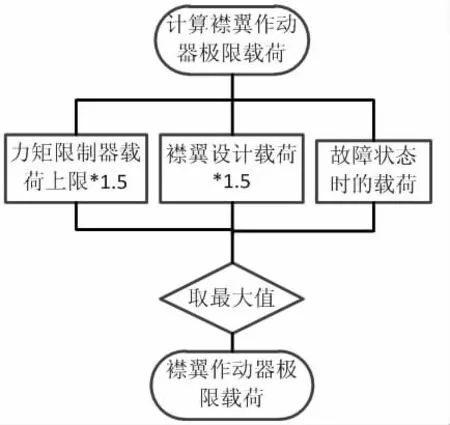
圖7 襟翼作動器極限載荷
3 結論
通過第2 章的襟翼設計載荷分析和計算之后,最后得到的可用于指導設計及制造的襟翼作動器載荷見表2 所示。
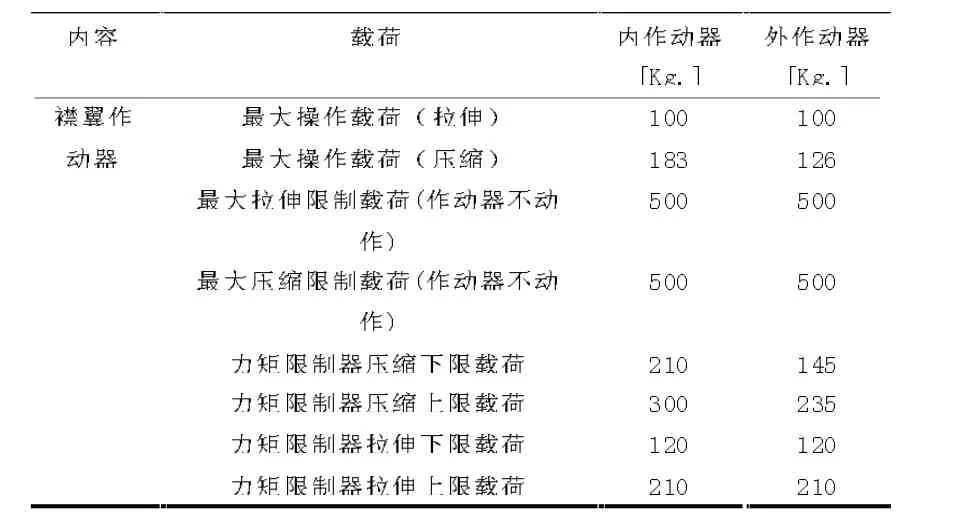
表2 襟翼作動器載荷結果
本文通過從CCAR23 部適航規章中針對襟翼載荷的條款入手,根據不同的氣動載荷條件及組合工況考慮得到襟翼作動器的最大操作載荷及設計載荷,從而導出襟翼控制系統力矩限制器的上限及系統故障狀態下的作動器載荷,最終得出襟翼作動器的極限載荷。這種設計載荷分析方法邏輯嚴密并對CCAR23部飛機采用相似架構的襟翼控制系統具有普適性,對操縱面控制系統的載荷設計具有指導意義。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
汽車維修與保養(2019年7期)2020-01-06 03:30:42
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39