一種可自動攀爬樹木的機械碾壓式滅蟲裝置
2020-06-03 02:21:22裴啟妍聶靖雯姜懿辰
科學技術創新 2020年5期
姜 山 裴啟妍 聶靖雯 田 野 姜懿辰
(東北林業大學 機電工程學院,黑龍江 哈爾濱150040)
隨著新時代林業現代化建設水平的提升,林木病蟲害防治始終是營林、園林業界的核心工作以及主要困難之一,現階段以化學防治應用最為廣泛,如常見的”樹干涂層發“”樹干注藥法“”樹干涂藥包扎法“”掛吊瓶法“”樹干涂膠法“等等,化學防治大多是用化學藥劑的藥性來防治害蟲。在殺死害蟲的同時,化學藥劑會揮發進入大氣,進而通過降雨污染生態環境;通過皮膚、呼吸粘膜、口腔進入人體,危害健康;通過藥物殘留進入害蟲天敵體內,破壞生態平衡;并且化學殺蟲極易導致害蟲產生抗藥性,因此化學殺蟲存在不可避免的弊端。與化學殺蟲相比,物理防治具有殺蟲快、無污染等優點,但是現有的物理滅蟲多是人工滅蟲及少量機器滅蟲,其中滅蟲機器一般都需要人工進行操作,無論人工滅蟲還是人工操作機器滅蟲均存在殺蟲率和效率都十分低的問題。因此,針對上述問題,設計一種可自動攀爬樹木的機械碾壓式滅蟲裝置顯得尤為重要。
1 方案設計
1.1 結構設計
本自動攀爬樹木的機械碾壓式滅蟲裝置通過電機帶動上、下機械手交替運動,實現自動攀爬功能,提高了工作效率,并且通過網絡攝像頭與碾蟲輪的配合,實現物理滅蟲的功能。
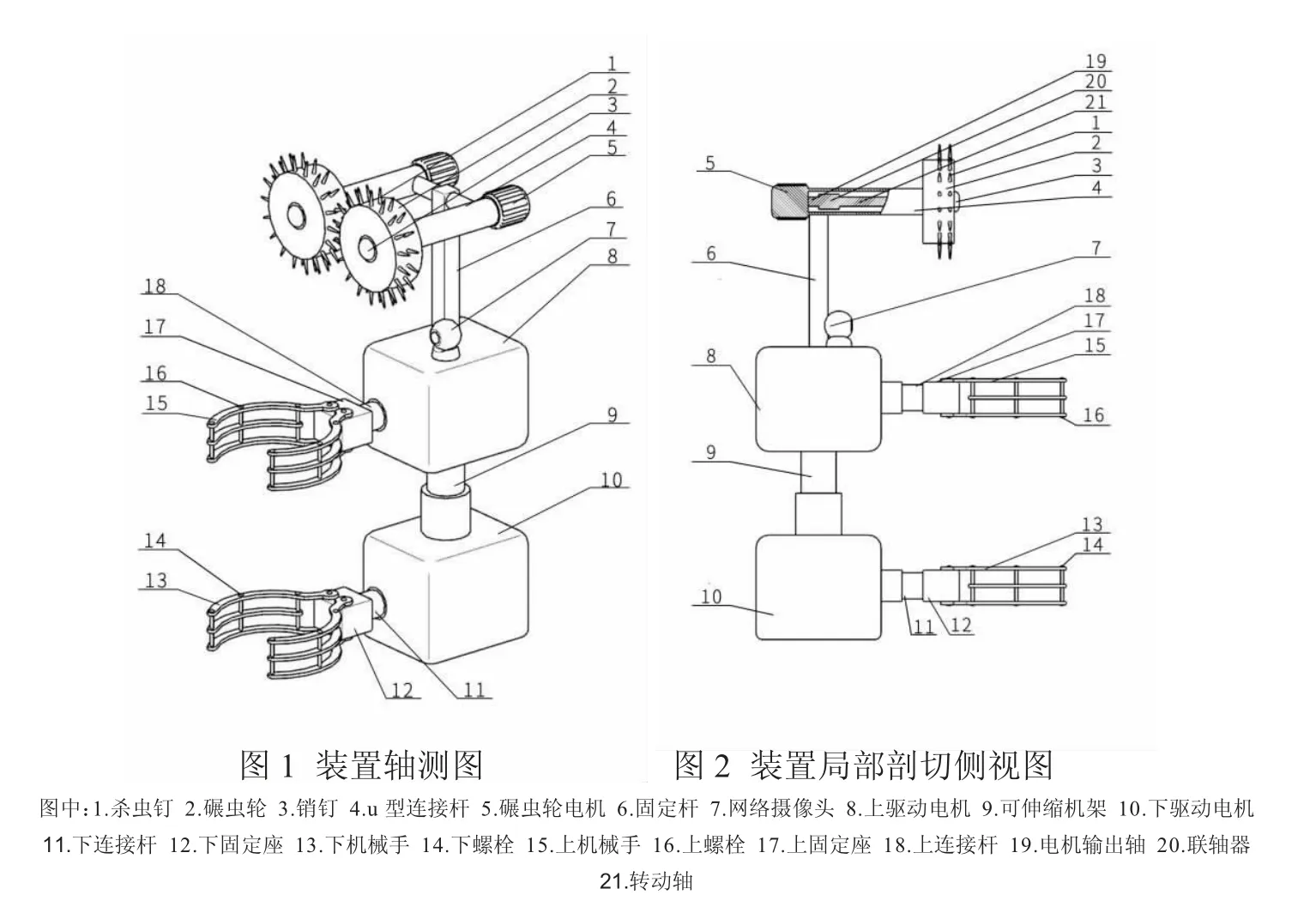
自動攀爬樹木的機械碾壓式滅蟲裝置包含殺蟲釘、碾蟲輪、銷釘、u 型連接桿、碾蟲輪電機、固定桿、網絡攝像頭、上驅動電機、可伸縮機架、下驅動電機、下連接桿、下固定座、下機械手、下螺栓、上機械手、上螺栓、上固定座、上連接桿、電機輸出軸、聯軸器、轉動軸。本實用新型的目的是這樣實現的:下驅動電機安裝在可伸縮機架下端,所述下驅動電機中部安裝下連接桿,所述下連接桿左端安裝下固定座,下機械手通過下螺栓鉸接在所述下固定座上,上驅動電機安裝在所述可伸縮機架上端,所述上驅動電機中部安裝上連接桿,所述上連接桿左端安裝上固定座,上機械手通過上螺栓鉸接在所述上固定座上,所述上驅動電機頂端安裝網絡攝像頭,固定桿安裝在所述上驅動電機上,所述固定桿上端安裝u 型連接桿,轉動軸可轉動裝配在所述u 型連接桿內部,銷釘安裝在所述轉動軸前端,碾蟲輪通過所述銷釘、所述轉動軸可轉動裝配在所述u 型連接桿上,碾蟲輪電機安裝在所述u 型連接桿上,殺蟲釘以雙排圓周方式安裝在所述碾蟲輪上。至此構成了一種可攀爬樹木的機械碾壓式滅蟲裝置。
1.2 技術指標
裝置整體采用鋁合金材料,減輕裝置質量及裝置攀爬時的負載;上下機械手,碾蟲輪,殺蟲釘采用耐磨性較高的硬質合金,防止長期磨損破壞裝置。1.2.1 下驅動電機長度為200mm,寬度為200mm,高度為200mm。下連接桿長度為50mm, 直徑為50mm。下固定座長度為60mm, 寬度為60mm,高度60mm。下機械手圓周直徑為200mm。下螺栓長度為80mm。上驅動電機由容量為50000mAh 的下裝配電池供電。1.2.2 可伸縮機架直徑60mm,在伸長到最長時,長度為140mm,縮短到最短時,長度為80mm,即裝置一次行程量為60mm。1.2.3 上機械手、上驅動電機、上固定座、上螺栓的技術指標分別與下機械手、下驅動電機、下固定座、下螺栓的技術指標相同,上裝配電池容量60000mAh。1.2.4 固定桿長度為200mm,寬度為30mm,高度為30mm,距靠近上驅動電機帶有機械手一面60mm處,并位于兩側面的中心處,為了使得整個裝置重心靠近抓樹一側。網絡攝像頭直徑為40mm,固定在固定桿邊側,距離其20mm處。U形連接桿直徑為40mm,長度為300mm。碾蟲輪直徑為90mm,長度為20mm。兩輪中心距為106mm。殺蟲釘長度為8mm,采用雙排圓周固定在碾蟲輪外側,能夠有效殺死害蟲。小型電機為AC小型標準電機,由上裝配電池供電。上述技術指標在實際生產及使用過程中,可以根據現實情況及使用需求進行合理的調整。
2 工作原理
本設計能夠實現無人操控自動工作。機器作業時,將可攀爬樹木的機械碾壓式滅蟲裝置的上、下機械手15、13 裝夾于規整樹干上,開動開關使下驅動電機10 工作,下驅動電機10 驅動下機械手13 張開,同時下驅動電機10 推動可伸縮機架9 向上收縮,可伸縮機架9 收縮的同時帶動下驅動電機10、下連接桿11、下固定座12、下螺栓14、下機械手13 向上移動,此時上驅動電機8 保持不動,當可伸縮機架9 完全收縮時,下驅動電機10 保持不動,下機械手13閉合自鎖,上驅動電機8 驅動上機械手15 張開,同時上驅動電機8帶動上連接桿18、上固定座17、上螺栓16、上機械手15 向上移動,當可伸縮機架9 完全伸出時,上驅動電機8 驅動上機械手15 閉合自鎖,上驅動電機8 停止工作,此時下驅動電機10 開始工作,上機械手和下機械手通過上述動作順序交替向上運動, 上機械手和下機械手通過上述動作順序交替向上運動,該裝置實現了爬樹功能,在上移過程中,網絡攝像頭7 開啟感知模式,運用基于CamShift 的算法感知捕捉蟲子后,碾蟲輪電機5 啟動,電機輸出軸19 通過聯軸器20 帶動轉動軸21 轉動,轉動軸21 帶動碾蟲輪2 相向轉動,害蟲被殺蟲釘1 殺滅,實現了物理滅蟲功能。
3 創新性及前景分析
3.1 創新性分析
3.1.1 本裝置采用物理滅蟲,在滅蟲過程中,對人體以及生態環境都提供了良好的保護作用,有效解決了化學滅蟲的污染環境,以及化學藥劑侵害人體健康的問題。3.1.2 本裝置為全自動滅蟲裝置,可自動攀爬樹干,不僅能夠識別靜止不動的害蟲,而且能運用基于CamShift 的算法對低速運行的害蟲進行追蹤識別,識別后碾蟲輪運轉,將害蟲帶入輪中殺死。3.1.3 本裝置結構簡單,由攀爬、識別、滅蟲三個部分組成。攀爬裝置主要由兩個驅動電機帶動運轉,驅動電機由可充電電池供電,做到無線工作,攀爬形式采用伸縮方式,由驅動電機控制中部伸縮桿的伸縮,過程簡單,并且穩定可靠。考慮到樹木表面光滑規整的程度較低,上、下機械手分別采用三排手爪組合安裝。下固定座含自鎖裝置,能夠有效防止裝置在運行過程中墜落,具有良好的防墜性。常用滅蟲裝置多選用”滅蟲拍“,由于樹干為圓柱形,拍死害蟲時的“滅蟲拍”與樹干接觸面積較小,不容易做到精準拍死,故殺蟲部分采用雙排釘相向旋轉絞入害蟲,作用范圍大,能夠有效地殺死害蟲。
3.2 前景分析
3.2.1 現如今,我國對生態文明十分重視,不斷推進生態文明建設以及林業現代化建設,作為林業大國,我國的林業由原先的林業生產加工逐漸轉變到林業資源保護,害蟲防治正是林業資源發展中一個重要的環節,但是由于化學除蟲副作用較大等多項問題的干擾,除蟲問題一直無法得到根治,這套可自動攀爬樹木的機械碾壓式滅蟲裝置恰好解決了這一棘手的問題,有效助力生態文明建設。3.2.2 本裝置結構簡單,造價低,體積較小便于攜帶,清潔環保,物理滅蟲效率高,做到精準滅蟲,能夠以較低投入大面積投放使用。該裝置為全自動滅蟲裝置,能夠實現無人工作,解決了人工除蟲耗時耗力的問題,節省了大量的人力資源。因此,該產品由良好的發展前景。