一種微型飛行器釋放機構設計及分析
2020-06-04 09:58:14唐金強
科學技術創新 2020年13期
關鍵詞:記憶合金
唐金強
(江南機電設計研究所,貴州 貴陽550009)
微型集群飛行器在新時代的作戰應用中得到了快速的發展,借鑒子母彈形式的載體飛行器+微型飛行器武器也逐漸得以應用,其一般由母艙、微型飛行器、釋放機構和推進、制導等裝置組成。本文針對一種子母集群飛行的釋放機構開展研究分析。微型飛行器由于本身質量小、體積小、抗沖擊能力弱等自身特點,在釋放過程中需要低沖擊,體積小的伸桿釋放機構。傳統的火工品釋放機構由于釋放過程中產生污染和沖擊大等本身特點,已經難以滿足實際作戰釋放的任務需求。
1 釋放機構性能要求
結合背景任務需求,微型飛行器釋放機構所應達到的基本性能指標有:
1.1 平穩性。釋放機構釋放過程對載體本體沖擊小,不構成潛在威脅。
1.2 可靠性。釋放機構應當盡可能的簡單,應考慮冗余設計。
1.3 釋放時間短。觸發時間應能夠被精確的掌握。
1.4 易于測試。釋放機構關鍵部件的工作狀態和健康狀態應當能夠被有效的觀測。
1.5 多重適用性。釋放機構應具有多重適用性,安裝簡便。
2 釋放機構設計方案
釋放機構外殼采用鈦合金材料,內部觸發釋放機構主要由兩部分組成:一部分為釋放機構主體,內含釋放驅動彈簧、機構復位彈簧、阻尼墊片;另一部分為釋放機構觸發機構,為滿足可靠性要求,采用了兩套觸發機構,其內部主要TI-NI 形狀記憶合金觸發彈簧和相應的觸發機構。
釋放機構主體的幾何構型為三棱柱體如圖1 所示,三棱柱的一個矩形端面用于和載體本體固連安裝,另兩個矩形端面上分別安裝有觸發機構,前后兩個三角形端面用于與銷槽配合,完成對可展開附件的固定。
釋放機構主要構成部件有鋼質彈簧、形狀記憶合金彈簧、帶有銷槽的中間塊和氟聚橡膠阻尼墊片。鋼質彈簧時釋放過程中的執行機構,用于將定位銷從定位銷槽中拔出。形狀記憶合金彈簧可以作為鋼質彈簧釋放過程中的阻尼器,以減少釋放過程中帶來的對載體本體沖擊。此外,該形狀記憶合金彈簧還可以作為地面測試過程中的釋放機構復位執行器,其復位原理同該釋放機構釋放觸發原理相近:當形狀記憶合金材料在受熱達到相變溫度后彈性模量增大,使得彈簧的剛度系數增大,壓縮鋼質彈簧推動中間塊,直至觸發機構將中間塊再度鎖死,實現釋放機構的復位。觸發機構主要由鋼質壓緊彈簧、形狀記憶合金觸發彈簧、觸發銷組成。通過形狀記憶合金彈簧驅動將觸發銷從中間塊的小孔中拔出,實現對機構的觸發。
3 性能測試
SMA 作為一種功能材料具有形狀記憶和超彈性等特殊性能,在溫度激勵下,SMA 從馬氏體結構向奧氏體結構轉變的同時長度也發生變化,當形狀記憶合金兩端約束時,會產生很大的回復力,利用這個特性,形狀記憶合金作為動作器可用于結構的主被動控制等智能控制場合,驅動結構變形,這種功能在宇航、機械和醫療等行業中被廣泛應用[1]。SMA彈簧具有較大的動作行程,是制作驅動元件和執行機構等部件較為理想的元件,因此被廣泛應用于各個領域。SMA彈簧是利用熱相變進行工作的,在熱相變過程中SMA彈簧把熱能轉變為機械能。(1)由于SMA 彈簧的應力- 應變呈非線性且與溫度有關,剪切彈性模量隨溫度變化,在利用SMA 彈簧作為驅動器時,必須對使用的SMA進行性能參數測試。(2)由于SMA的溫度受環境的影響很大,只控制電流很難精確的控制驅動器的輸出位移和力,所以需要提供溫度、輸出位移和力等參量綜合對電流進行反饋控制。當它被用作主動變形結構中的驅動元件時,特別是在本設計中,尤其需要對形狀記憶合金彈簧的熱- 力學性能進行測試。
3.1 測試方法
目前, SMA 驅動器常用的加熱方式有3 種:直接電加熱、間接電加熱、熱氣/流體加熱,其中直接電加熱是最方便的方法。通過控制SMA絲的加熱電流來控制SMA彈簧的溫度, 實現對SMA彈簧響應速度、輸出力和位移的控制。電加熱驅動測試法設備相對簡單,實驗過程易于操作。SMA彈簧驅動器的輸出力和位移、響應速度受驅動電流、冷卻速度、預變形量和負載的影響很大,設計時要選擇合適的參數。
3.2 SMA彈簧測試實驗設計
設計如下樣機,在真空環境中對形狀記憶合金彈簧特性做出準確的評估的初其相變溫度、功率消耗、釋放時間等詳細參數。
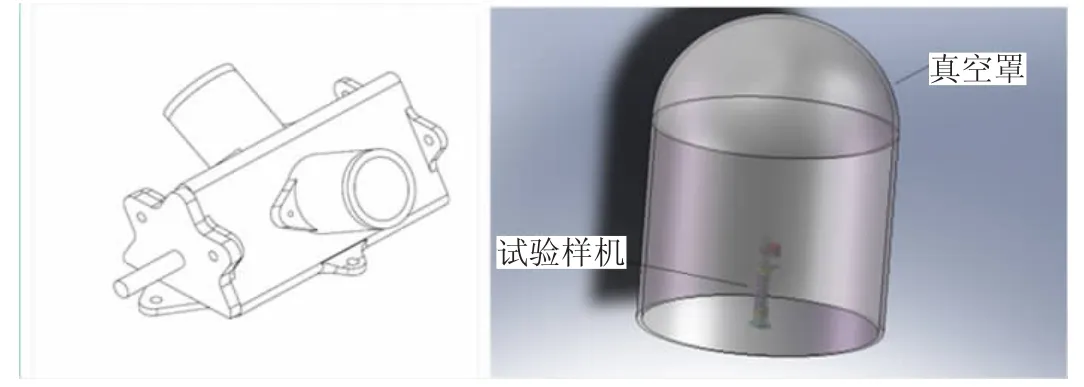
圖1 測試樣機組裝圖及SMA彈簧測試真空環境
兩個肩型軸環和形狀記憶合金彈簧用一根帶刻度型支柱串連起來,支柱的另一端用安裝用底座固定于實驗臺上。形狀記憶合金彈簧與支柱之間采用隔熱樹脂肩型軸環進行隔熱處理,以便盡可能的貼近實際使用條件下的工作狀況。帶有刻度型支柱將會提供彈簧伸長量數據。對SMA彈簧進行通電,在不同的電流,負載,初始長度,初始溫度條件下測量這些變量對SMA 彈簧性能的影響。設計電流為5A 和6A 兩檔,負載為200g,400g兩檔,初始溫度分為34 以上及以下兩檔,初始長度因實際測試隨機而定。通過以上對形狀記憶合金彈簧的一系列測試,對數據結果進行分析,了解形狀記憶合金彈簧的性能。最后,應該加上鋼制彈簧制成偏動驅動器,測試SMA彈簧的動態性能,以了解驅動器的釋放力量和釋放時間參數。
3.3 結果分析
真空且室溫(25℃)條件下,加熱初始階段,溫度幾乎直線上升。隨著溫度的升高,SMA與外界熱交換的功率逐漸增大;溫度上升速度變慢;當電加熱的功率和SMA 與環境熱交換的功率相等時,SMA的溫度趨于恒定。加熱電流越大,溫度上升速度越快。不同的加熱電流可以使SMA 保持不同的溫度,SMA 彈簧的剛度和溫度有確定的關系,可實現對釋放機構輸出位移和力的控制。在非真空環境下開展了相同的實驗,彈簧所處的環境對本身溫度的影響尤為顯著。真空條件下的彈簧溫度幾乎呈線性關系上升,在真空條件下,熱量的散發只有通過熱輻射這一條路徑,與空氣交換熱量的影響已經變得很弱。因此釋放機構在實際應用于裝備時,應提出SMA工作腔內的真空嚴密性的工作要求。在負載200g條件下的記憶伸展長度為25mm左右,釋放機構所使用的SMA 彈簧的相變溫度為45-50℃左右,實驗材料迅速拉伸的溫度范圍僅有4℃左右,這一階段彈簧中絕大部分的馬氏體相迅速轉變為奧氏體,使變形速度迅速增加,這一點是符合任務需求的。在200g的條件下,給SMA彈簧通以5A 及6A 的電流,相同負載下,增加電流能顯著縮短SMA 彈簧的反應時間。
4 結論
在新裝備的研發及應用中,針對基于子母形態的微型飛行器釋放方式,探究了一種基于SMA 相變原理的釋放機構,并開展了實驗仿真分析。實驗認為,基于SMA 相變的釋放方式有利于減少對微型飛行器的沖擊,減少污染物對飛行器的影響。在實際應用中應考慮SMA真空的工作環境,對外結構的設計提出了新的要求。通過電流越大,SMA溫度比例上升越快,到一定界限后將趨于平穩;相同負載條件下,SMA溫度越高,形變程度越大,可滿足釋放要求;相同負載條件下,增加通過電流,SMA彈簧相變啟動時間有明顯改善。
SMA彈簧是利用熱相變進行工作的,在熱相變過程中SMA 彈簧把熱能轉變為機械能。由于SMA 彈簧的應力- 應變呈非線性,在實際運用時還需要對彈簧進行熱培訓[2],讓其擁有較好的熱穩定性,另外,SMA彈簧的設計工藝將影響彈簧的機械性能。本文的工作為子母集群微型飛行器的釋放機構設計提供了一定的技術基礎和參考依據。
猜你喜歡
紡織科技進展(2023年10期)2023-11-23 10:04:52
化學教與學(2023年5期)2023-04-03 06:12:14
科海故事博覽(2021年33期)2021-12-08 05:39:00
廣東建材(2021年6期)2021-07-01 02:24:02
科學技術創新(2020年21期)2020-01-06 20:58:51
中學生數理化·八年級物理人教版(2019年12期)2019-05-21 07:26:42
科學中國人(2015年29期)2015-07-14 14:14:05
西南軍醫(2015年3期)2015-04-23 07:28:21
中國工程咨詢(2015年8期)2015-02-16 06:38:52
中國藥業(2014年24期)2014-05-26 09:00:33
