基于深度學習及GPU計算的航天器故障檢測技術
2020-06-06 06:56:04田林琳
計算機測量與控制 2020年5期
田林琳
(沈陽工學院 信息與控制學院,沈陽 113122)
0 引言
隨著航天技術快速發展,航天器自動化水平越來越高,航天器通常于高溫、高壓等惡劣環境中,一旦設備在飛行過程中出現故障,那么將造成不可預知的問題,甚至對人們安全出行帶來嚴重影響,因此,對航天器故障進行有效檢測已經成為該領域研究的熱點問題之一。在現階段,最常用的航天器故障自主檢測方法主要包括人工蟻群算法、模糊算法[1]。由于航天器故障檢測方法能夠快速自動檢測出航天器潛在的故障問題,進而為航天器設備維護提供依據,保障航天器安全飛行。
傳統故障檢測方法大多針對的是航天器周期性故障問題進行識別與搜索的,自主性相對較差,而航天器故障多具有非線性特點。采用傳統故障檢測方法對故障進行檢測,往往需要耗費大量成本,但檢測精準度較低,無法達到滿意檢測效果[2]。
為了避免上述方法的弊端,提出了基于深度學習及GPU計算的航天器故障檢測技術。GPU計算技術的發展為基于深度學習檢測航天器故障優化加速提供了有效途徑。在GPU計算方式下,結合航天器故障信號特點,對故障檢測算法進行優化加速,進而保證航天器的安全運行。
1 航天器故障信號特征分析與檢測原理
航天器正常飛行時,其運行狀態特征信號變化幅度較小,大部分集中在某一尺度范圍內。在單位時間內,航天器飛行所受到溫度影響,無論大小,其飛行頻率都存在一定差異,因此,研究某階段部分數據能夠如實反映出該階段的狀態。航天器設備的各個部件都具有一定可靠性,在規定條件下,航天器可靠性與運行時間呈正比例關系[3]。航天器可靠性將隨著時間推移而降低,航天器出現故障的時間也是隨機的,輸出的故障信號也是極不規則的[4]。由于航天器出現故障,特征信號在時間是分維數的,因此,采用GPU計算方法更能準確反應航天器運行狀態。
航天器故障通常分為“硬故障”和“軟故障”兩種,其中“硬故障”指的是航天器出現突發性硬件損壞,而“軟故障”指的是某些參數出現不良變化,故障檢測過程是識別航天器有無故障出現的過程[5]。
航天器故障檢測原理可描述為:
構造深度學習檢測模型,在此模型中,隨著層次不斷提高,輸入樣本層次相對抽象。基于深度學習的航天器故障檢測過程是通過模型層次分析獲取樣本的本質過程。在樣本訓練過程中,可通過調節相關航天器參數,使輸出結果最大化接近輸入值,以此獲取輸入值的相關層次特征。在該過程中,將每一層輸出結果視為下一層輸入結果,以此實現相關輸入數據分級表達,進而實現較高層次學習,不斷重復該過程,直到模型識別目標故障特征位置,通過該原理能夠實現對航天器故障的高效檢測[6]。
2 基于GPU計算技術航天器故障特征提取
GPU計算技術是顯卡的中心,與圖形處理器類似,只不過GPU是專門為執行幾何計算而設計的。時下GPU具有3D特征提取功能,通過在坐標位置中確定一個特征,那么利用GPU技術就可以迅速計算出該圖形所有像素,并在指定位置獲取相應特征[7]。獲取的GPU圖像如圖1所示。
圖1 GPU圖像
針對航天器在運行過程中出現的微弱振動信號提取需求越來越迫切,故障特征提取是實現航天器故障檢測關鍵環節,最常用的方法是GPU計算技術提取方法,是一種平穩提取方式。由于條件限制,難以獲取航天器振動數據,采用地面設備振動數據作為故障數據源,提取相關故障特征[8]。具體提取方法為:設置提取頻率為10 k,每1 024個振動檢測值,作為一組數據源,從中隨機選取25組數據。對每組數據進行模態分解,獲取多個組合,并對這些組合進行變換特征提取。由于GPU作為故障特征處理,實際上是一個二維分段提取過程,包括從中讀取特征圖像和標記圖像中的X、Y坐標。此外,輸出寫地址是由光柵處理器來確定的,無法改變程序應用,實際上,碎片處理器是一個SIMD數據并行執行單元,在所有碎片中執行獨立代碼[9]。對每個代碼中所代表的信號進行模態分解,獲取的故障數目不一定相等,但通過信號統計分析,可將所有信號能量比構造為特征向量,實現對全部故障特征的提取。
3 基于深度學習航天器故障檢測
3.1 深度置信網絡模型
依據上述提取的故障特征,采用深度學習方法對航天器故障進行檢測。深度置信網絡模型是深度學習的主要模型,是一種無監督特征學習模型,其基本組成單元是基于受限玻爾茲曼機模型構建的,能夠最大概率擬合輸入數據,同時捕獲輸入數據中隱含的高階相關性。每一層都是由可視層和隱含層所組成的雙層網絡模型,各個層次間的神經元節點是有連接的[10]。在GPU計算技術支持下,將提取的航天器故障特征作為輸入數據樣本,而隱含層相當于特征提取器,在相關模型連接權值參數支持下,可將構建的深度置信網絡模型分為兩部分,分別是無監督形式預訓練階段和有監督形式的微調階段。
圖2所示為3個隱含層和1個可視層組成的深度置信網絡模型。
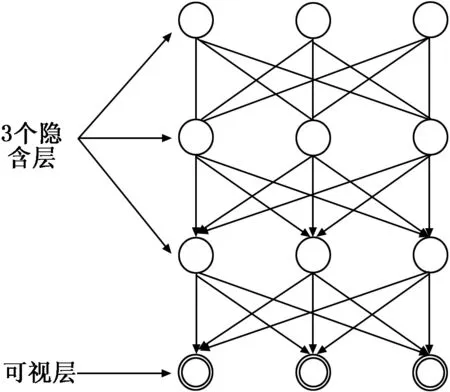
圖2 深度置信網絡模型
由圖2可知,3個隱含層為無監督形式預訓練階段,而1個可視層為有監督形式的微調階段。在這兩個階段下,對航天器軸承故障問題展開分析。深度置信網絡模型具有若干個隱變量層的生成模型,該單元通常是二值的,只有一個隱藏層存在一個隱含層。頂部兩層之間連接是無向的,而其他層次之間連接是有向的,箭頭代表了最接近數據的層次。深度神經網絡在每一層都是對最原始輸入數據進行特征描述的,由于深度網絡是分層訓練的,因此,最優一層分類器可換為任意一種分類器。在對航天器某個節點進行故障檢測時,需丟掉網絡第三層,才能形成自聯想神經網絡,使其形成一種更好神經網絡模型,實現對故障數據的重構,也為航天器軸承故障檢測奠定基礎。
3.2 軸承故障預測
根據上述內容構建的深度置信網絡模型的輸入及隱含層神經元輸出在訓練中伯努利值,大大限制了其在時序數據預測中的應用。由于輸入層和隱含層各個單元都是連續性隨機單元,因此,越高度逼近連續型非線性時序數據,越說明該軸承故障數據越多[11]。
采用基于深度學習航天器故障檢測技術對軸承故障進行預測,可通過特征指標準確描述關鍵機械部件故障特征,將經過GPU計算技術下提取的故障特征用于深度置信網絡故障預測基本數據。所使用的具體步驟如下所示:
1)運用GPU計算技術提取振動加速度數據,推測航天器軸承的使用壽命。
2)提取不同狀態下振動參數,組成多維特征矢量。
3)根據原始多維特征矢量融合特點,判斷軸承故障出現的綜合特征;
4)通過正常時期指標數據的訓練樣本,將出現的故障綜合特征進行歸一化;
5)對模型參數進行優化,建立軸承故障振動連續預測器模型。
6)對可能引發故障的相關數據集進行預測。
通過對軸承故障預測,能夠搜集相關數據,為故障識別奠定基礎。
3.3 軸承故障識別
在對不同故障任務進行識別時,需設置不同網絡參數,在正常情況下需通過人工經驗來耗費大量時間。因此,需設計一個具有參數自適應能力診斷模型,以此提高軸承故障識別適應性。軸承故障如圖3所示。

圖3 軸承故障
由圖3可知,軸承故障位置依次為外圈、密封處、內圈和滾動體。根據該故障位置,提出的一種基于深度學習及GPU計算的航天器故障檢測技術,用于軸承故障識別,具體識別步驟如下所示:
1)分析并識別滾動軸承振動信號;
2)構建數據樣本集作為訓練樣本,用于故障的識別;
3)檢測識別網絡權值矩陣,并處理偏置矩陣的初始化數值;
4)檢測技術可以自動確定網絡所有的關鍵參數,用于識別;
5)根據深度置信網絡模型中的最優測試樣本,用于測試識別故障。
通過把軸承的復合故障振動信號和單故障信號進行歸一化處理,在構造故障樣本,根據不同故障狀態下的信號振動情況進行采樣。以多個采樣點為基礎,學習故障特征,由此實現航天器故障檢測。
3.4 故障特征學習
在航天器軸承故障的診斷識別當中,深度學習與先進信號處理之間相互作用,對故障的識別判斷發揮了各自的優勢。深度學習對信號局部特征的相似數據進行有效的區分和整理,避免數據重復利用。
深度學習方法運用深度置信網絡模型,對原始信號無監督特征學習進行監督,使軸承故障特征學習更加完善,同時提高了航天器健康狀態自動、高效的識別效果。所提方法具體步驟如下所示:
1)訓練機械振動加速度數據;
2)將原始數據進行歸一化處理,并將其劃分為訓練樣本和測試樣本;
3)使用深度置信網絡模型,用于訓練樣本無監督特征學習;
4)通過構建健康狀態分類器,把學習到的訓練樣本深層特征輸入到模型之中。
3.5 智能故障診斷
基于上述內容,設計智能故障診斷實現方案,具體步驟如下所示:
1)智能故障診斷可以直接獲取軸承振動頻譜數據;
2)智能故障診斷可以直接建立訓練樣本和測試樣本;
3)構建具有代表性的多隱層深度置信網絡模型,可以自主區分并獲取訓練樣本;
4)深度置信網絡模型具有自主學習的性能;
5)采用深度學習方法實現智能故障診斷。
4 實驗
為了驗證基于深度學習及GPU計算的航天器故障檢測技術可靠性,需結合自身研究成果,依次展示不同方法對航天器軸承故障檢測效果。
4.1 實驗參數設置
實驗設備軟硬件參數設置如表1所示。
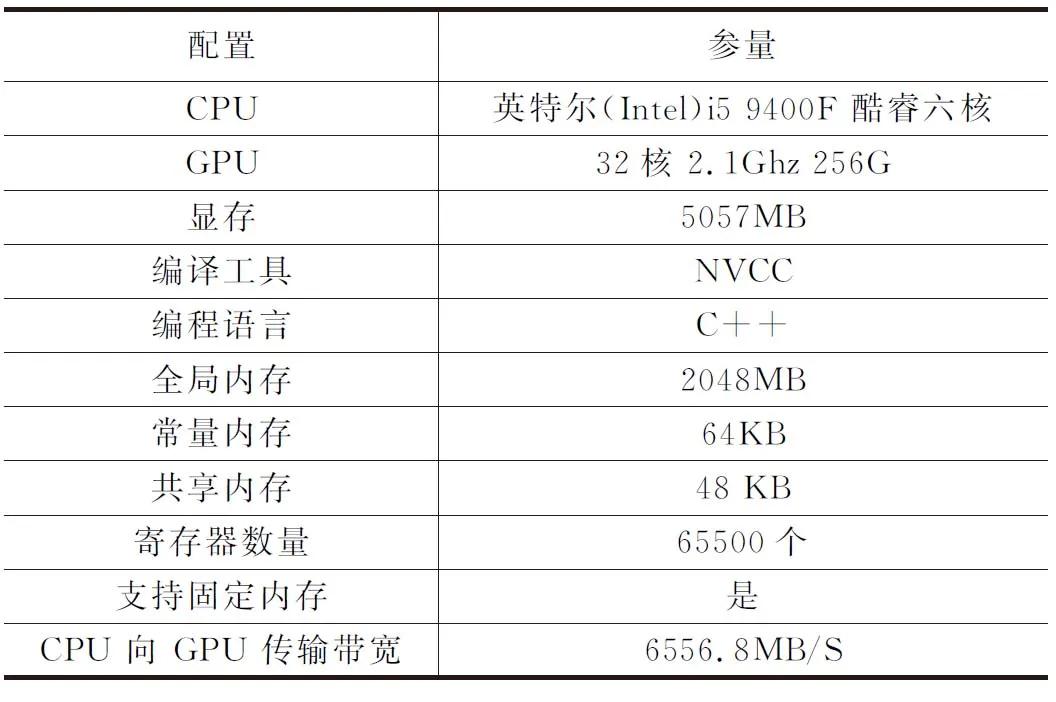
表1 實驗設備軟硬件參數
4.2 軸承故障檢測
將NASA預測數據庫中的軸承全壽命實驗數據作為樣本數據進行檢測分析,根據運行時間最長的軸承作為研究對象,通過多次檢測數據的結果提取每個信號段的指標數據特征。把全壽命信號分為4 000個數據段,采用融入原始特征向量之中的局部線性嵌入算法,將第一個非零特征值與對應的特征矢量作為綜合特征指標,如圖4所示。
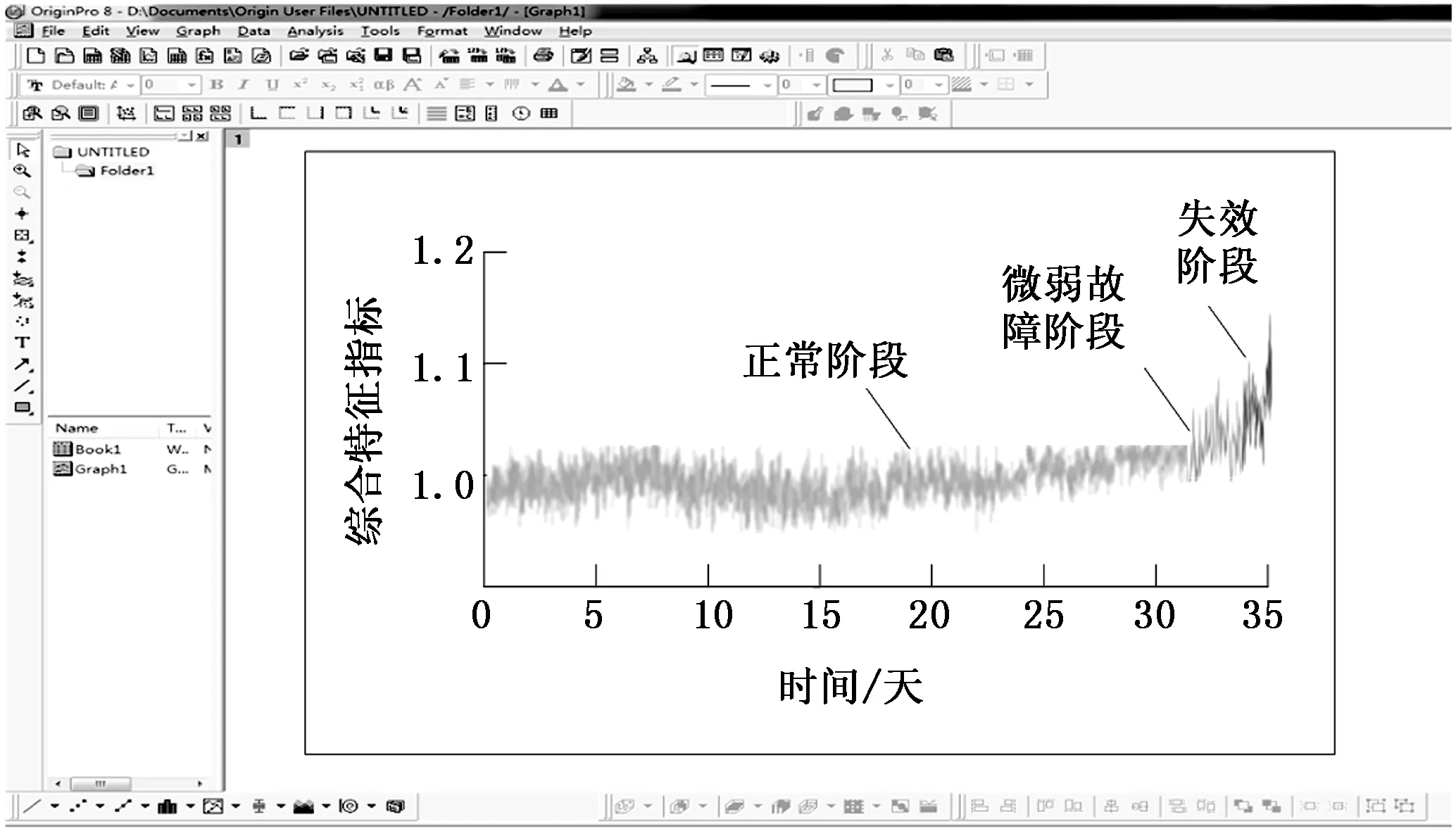
圖4 軸承綜合特性指標
由圖4可知,隨著時間的增加,正常階段下的綜合特征指標最高為1.04;微弱故障階段的綜合特征指標最高為1.06;失效階段綜合特征指標最高為1.2。訓練樣本為第7天到第28天的綜合特征指標,預測目標為第28天到第35天的綜合特征指標。
將深度學習及GPU計算的航天器故障檢測技術與傳統故障檢測技術在不同時間段下進行對比,結果如圖5~6所示。
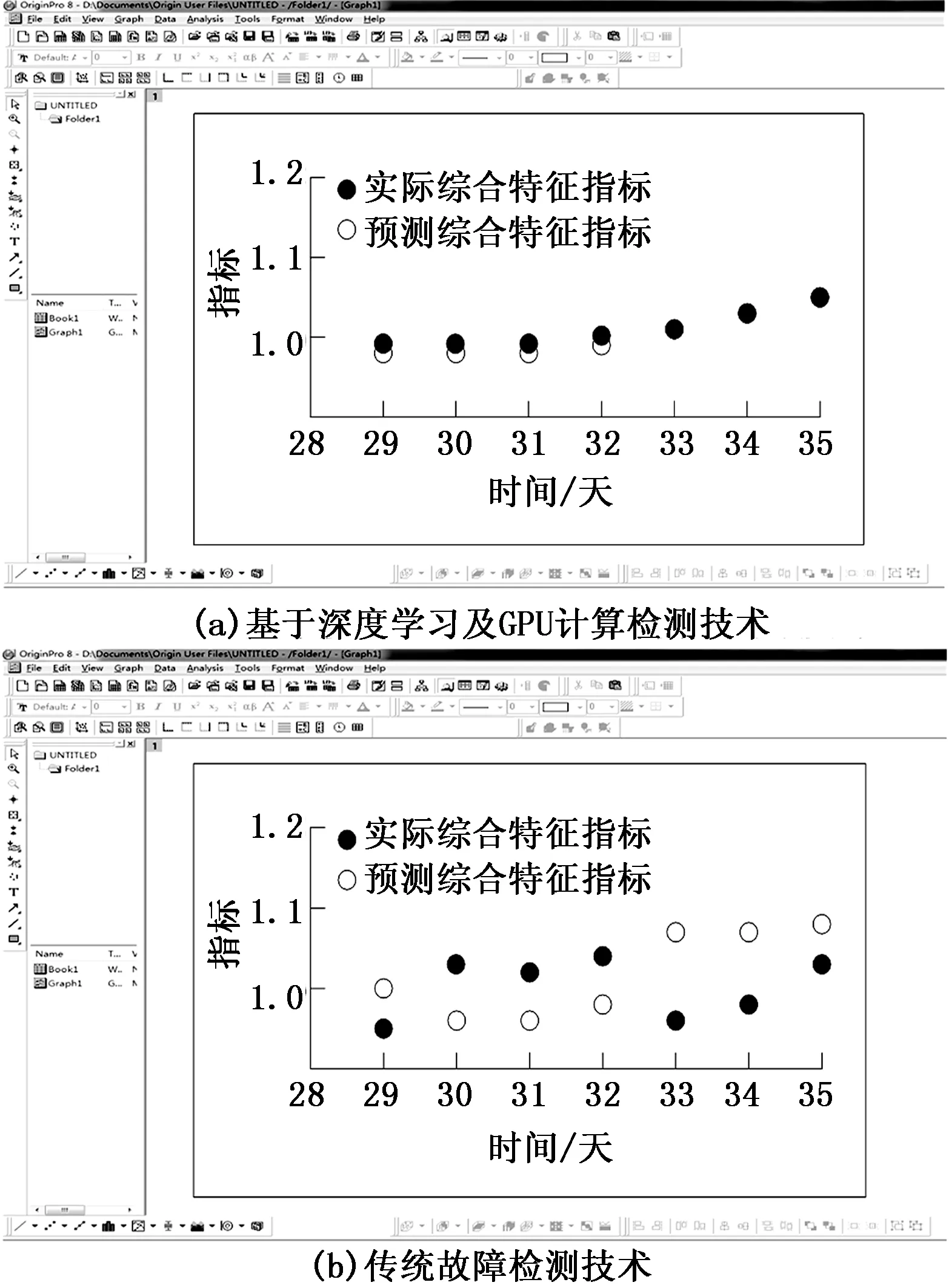
圖5 兩種技術第7天到第28天綜合特征指標
由圖5可知:采用深度學習及GPU計算檢測技術在第7天到第28天內,預測的綜合特征指標與實際綜合特征指標基本吻合;而采用傳統故障檢測技術在第7天到第28天內,預測的綜合特征指標與實際綜合特征指標相差較大。
圖6 兩種技術第28天到第35天的綜合特征指標
由圖6可知:采用深度學習及GPU計算檢測技術在第28天到第35天內,預測的綜合特征指標與實際指標基本一致,在第32天時,預測指標與實際指標重合;而采用傳統故障檢測技術在第28天到第35天內,預測的綜合特征指標與實際指標相差較大,說明采用傳統方法預測效果并不精準,而使用深度學習及GPU計算檢測技術預測效果較為精準。
將深度學習及GPU計算檢測技術與傳統檢測技術的檢測精準度進行對比分析,結果如表2所示。
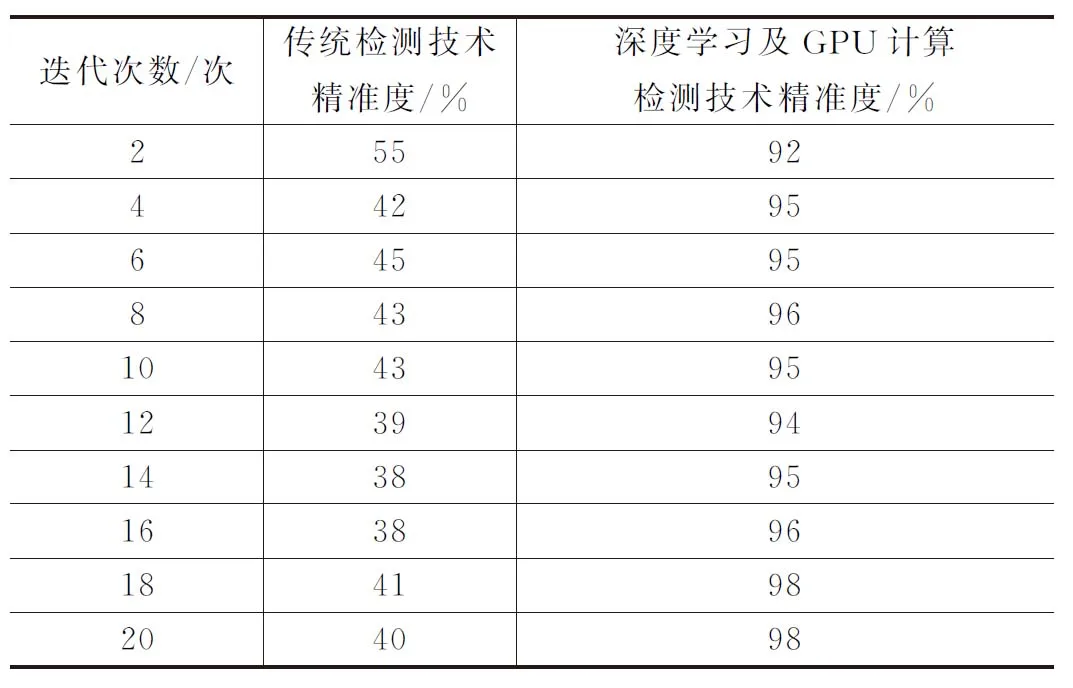
表2 兩種技術檢測精準度
由表2可知,隨著迭代次數增加,傳統檢測技術始終維持在60%以下,而深度學習及GPU計算檢測技術始終高于90%以上。由此可知,深度學習及GPU計算檢測技術對航天器故障檢測精準度較高,說明該技術是具有可靠性的。
5 結語
針對傳統航天器故障檢測方法存在檢測精準度較低的問題,提出了基于深度學習及GPU計算的航天器故障檢測技術。構建深度網絡學習方法,深度學習網絡模型節點,獲取相關故障特征,以此實現對航天器當前故障狀態的判定,進而完成航天器故障自主檢測。由實驗結果表明,該方法在對航天器進行自主檢測時,相比于傳統故障檢測精準度提高較多。采用深度學習方法能夠自適應提取輸入數據中的代表性信息,擺脫以往檢測的依賴,獲取可靠故障預測結果。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
汽車維修與保養(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
