基于System Vue的爬壁機器人控制器研究
2020-06-06 06:56:24孟超,郭倩
計算機測量與控制 2020年5期
孟 超,郭 倩
(1.西安工程大學 學報編輯部,西安 710048; 2.西安工程大學 電子信息學院,西安 710048)
0 引言
由于爬壁機器人[1]具有對墻面吸附能力強等特點,許多科研工作者對其進行了廣泛的研究。文獻[2] 提出了一種仿生爪刺式履帶爬壁機器人,來提高爬壁機器人的粘附性能和脫附效率;文獻[3]提出了一種基于振動吸力機構的壁虎式爬壁機器人,對機器人的爬坡能力進行了提高;文獻[4]采用一種雙環滑模控制算法,對爬壁機器人路徑跟蹤控制問題進行了驗證,最終使整個控制過程的準確性得到了進一步提高。 但是爬壁機器人普遍存在結構較簡單,靈活程度較低,智能性和掌控數據方面較差等問題,導致結構與尺寸的設計也不能較好地反映所處工作環境狀態,無法對系統數據信息進行合理反映,而SystemVue能夠充分解決攀爬機器人工作環境狀態問題。
SystemVue是一款智能機器設計過程中所使用的模擬程序,能夠使設計者在模擬環境中快速驗證所設計的機器人性能。SystemVue擁有級頻頻射組件能夠在時域、頻域中同時模擬,具有較好的同步性,自身具備調制解調功能,濾波器抗干擾能力強,其多端接口可以使用多方數據庫同時模擬,更能夠識別C++、VHDL、mm-code等多種語言環境,是一款強大的模擬調試軟件[5]。針對以上問題,文中基于System Vue進行了一種新式爬壁機器人控制器研究,對其進行系統分析。
文中通過對爬壁機器人進行控制器仿生分析,將機器人控制器內部系統進行理論性研究,在研究的基礎上進行下一步的控制器系統動作追蹤與處理,并進一步構造步態規劃[6],將規劃后的數據進行系統控制器控制,逐漸掌控控制器在理論分析過程中的全局數據,并由全局數據作為參數設置的基礎,將參數構造到一定的高度,并進行參數信息的分析,獲得符合工作環境的主導信息,以完成對爬壁機器人控制器自主控制算法的基礎參數數據獲取,并根據自主控制算法加強控制器系統操作,改進控制器硬件電路,最終實現對爬壁機器人控制器的研究。
該研究方法能夠較好地完成控制器系統的控制工作,并在較大程度上減少了不必要的系統損耗,為理論性研究提供實驗基礎,并提升了控制器的性能,可更好地控制爬壁機器人路徑。
1 仿生分析與步態規劃
一般情況下,爬壁機器人的主體結構主要包括機器軀體、機器腿、機器腳掌3個方面,在機器腳掌部分多為仿生微納米黏質材料,在一定程度上能夠緩和機器人的自身重量,進而加強爬壁機器人的本體粘附能力[7]。
在機器人控制器仿生分析過程中,對爬壁機器人的腿部進行仿生關節的模擬性增加操作[8],并進一步提升關節的靈活性,促使關節在運行過程中能夠自主完成對身體的前后控制以及傾斜處理,并增添其柔韌性能,利用伺服電機將腳掌部位的鋼絲繩進行整體性拖拽,并進行系統驅動收線處理,在系統收線過程中完成對整體肢體操作的控制。并改變單向舵機的轉動方向,提升其轉動速度,增加腳掌部位與墻面之間的預壓力,增大壓力受力面積,降低對墻面的重力負擔[9]。對腳掌進行柔性結構處理后的結構圖如圖1所示。
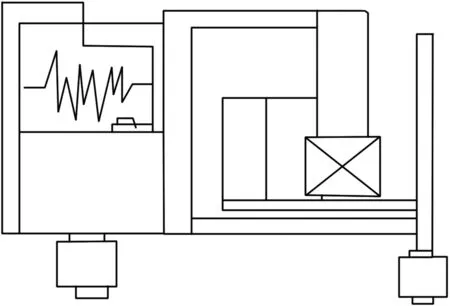
圖1 結構圖
在控制機構中主要包括系統傳動結構與系統驅動結構,在系統傳動的過程中,增強對鋼絲繩以及部位前模塊的驅動管理,在驅動系統中,提升整體驅動裝置性能,并增添伺服電機以及收線裝置,以進一步加強對驅動模塊的集中式處理[10-11]。
首先將鋼絲繩的首端與收線輪相結合,尾端與收線滑塊相連,并將鋼絲繩外套與聚四氟乙烯管的管體進行匹配操作,以適應管內滑動環境,進而減少操作的不必要損耗,將聚四氟乙烯管的一端與腳掌緊密相連,利用伺服電機的控制性能將收線輪帶動,并實現鋼絲繩的自主拉伸操作,在系統拉伸的過程中注重對系統的自我防護,減少拉伸摩擦,以保證控制器在運行過程中的運行路面平滑[12]。
在機器人的步態規劃中要注重對伺服電機驅動的處理,加強電機的控制,并雙向調節電機方向,同時對電機進行編號設置,設置實驗電機為S、P、T,將電機S與傳動機構中的腳掌部件相連。電機P與并聯設施中的邊軸進行連接,電機P與機器腿部進行連接,最終實現對腿部系統的擺動控制[13-14]。
由于爬壁機器人自身系統具有柔韌性,將伺服電機作為鋼絲繩的拖動裝置,同時規定收線輪的收線間距,其設置的公式如下:
(1)
式中,i為爬壁機器人的腿部系統擺動次數。通過式(1)查找制定規則,以此進行下一步驟的控制模型建立與參數設定。
2 控制模型建立與參數設置
根據仿生分析所獲得的步態規劃數據,對爬壁機器人控制器建立控制模型的和設置參數[15]。其控制器模型圖如圖2所示。
將爬壁機器人所具備的智能自主循跡經過系統模擬攝像進行圖片收集處理,同時對處理后的引導性曲線進行系統分析與處理,并對圖像灰度化與二值化信息加工,在獲取的圖像中標記一條較為清晰的追蹤曲線,收集相關曲線信息,經過網絡模塊式加工,對圖像進行分割,并對分割后的模塊進行分類規劃,獲取規劃后的整體圖像,在網格圖像中收集較窄的2條自主循跡引導曲線,并在2條曲線中選擇合適的2個追蹤節點F與H,將其所處位置用位置坐標進行標記,同時將2個點在中央圖像中的位置分布進行吸收態的處理,如圖3所示。
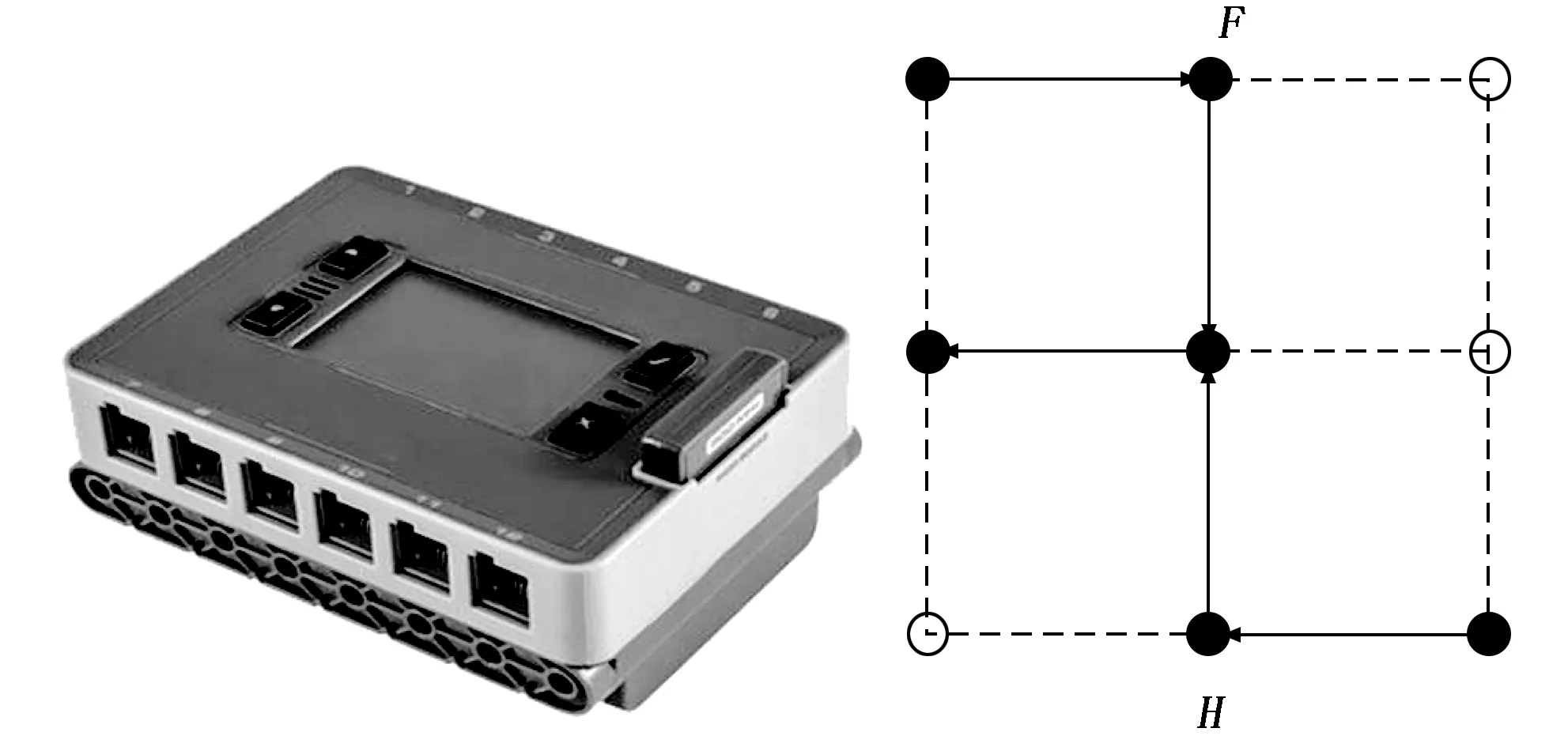
圖2 控制器模型圖 圖3 節點分布圖
爬壁機器人所構造的運作動態值應按照機器人在工作過程中產生的雙門氣閥開發差度值進行差值選取,并將獲取的最終差值進行理論比較。其測量的差度值同時作為機器人動作標準性與準確性的具體參數,并利用參數得出的強化型信號將目標值進行分離操作,利用離散函數對獎勵函數進行表示,同時將吸附狀態時的獎勵函數設定為:
(2)
式中,H表示爬壁機器人雙門氣閥開發差度值;K為其差度值的強化型信號;Q為爬壁機器人雙門氣閥開發差度的目標差值。
對剩余參數進行系統設置,其中折扣參數因子為Z,運行總距離為S,最終的探索次數最大值設置為T,探索次數的最小值為R,并保證系統在吸附狀態下進行工作,選取下一步動作為備選動作進行系統處理,同時保證所獲取的差度值為0,此時建立爬壁機器人控制器的控制模型為:
(3)
式中,pmax為伺服電機控制馬達電力的最大值。將伺服電機的控制馬達電力開至最大值,利用引導線對控制器進行穩定性處理,保證其在控制過程中不會產生位置偏移的狀況,從而實現對爬壁機器人控制器的控制模型建立[16-17]。
3 吸附控制算法優化
在控制模型建立的基礎上設計爬壁機器人控制器的自主控制算法,同時對控制算法進行系統加工。爬壁機器人的主要功能為吸附和移動,由于傳統爬壁機器人控制器的控制僅對其移動方向進行簡單控制,無法完成復雜的運行操作,為此,需進一步對控制器的吸附控制算法進行深入研究。爬壁機器人常見吸附方式包括負壓吸附和永磁吸附,其中,負壓吸附可以通過吸盤內產生負壓而吸附于壁面上,不受壁面材料的限制,因此首先優化控制器的吸附控制算法。在吸附控制算法優化過程中要注重對于系統的自動化處理,并保持系統處于加強狀態,在算法計算伊始,需對系統進行引導線的定額處理,將引導線作為處理的系統中心,同時利用引導路徑加強系統自身防護,并對路徑進行清理,在清理后進行吸附控制算法的優化。控制器系統引導線如圖4所示。
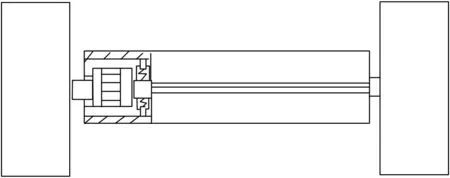
圖4 控制器系統引導線圖
為獲取最佳算法策略,采用中心預測方法預估主動信息,更改吸附動作函數產生的運作值,使吸附函數數據保持更新狀態,在策略更改的同時,將數據更新至與動作v無關的工作數值,同時更新控制器系統的吸附控制算法,公式如下:
(4)
式中,ak為負壓吸附力更新值;ml為數據更新控制函數。根據式(4)加強對系統吸附功能的控制,同時計算出收斂函數的參照值,將參照值作為中心系統工作狀態下必備的系統操作數值,并進一步對自主控制算法進行理論構建,同時連接引導線公式,將二者結合,并分離出不匹配數據,同時將數據進行錄入處理,簡化錄入程序,在錄入過程中加強對系統的掌控,保護系統在運作過程中不會產生毀壞問題,最后對其建立矩陣,加強Q矩陣設置,其矩陣如圖5所示。
同時在初始狀態引入Agent吸收態矩陣值,并為系統策略添加回報參數,以實現對自主控制算法的完善。
經過以上步驟對爬壁機器人控制器進行研究,不斷加強控制器元件組合力度,最終實現系統理論性研究。
4 改進研究
爬壁機器人控制器吸附控制優化算法能夠實現爬壁機器人吸附功能的優化。根據所設計的算法改進控制器硬件部分,其中控制器的核心硬件為遙感器,采用JH-D400X-R4型六向搖桿作為控制器的遙感器,其具有方向操縱靈活、速度誤差小的優點,其內部示意圖如圖6所示。
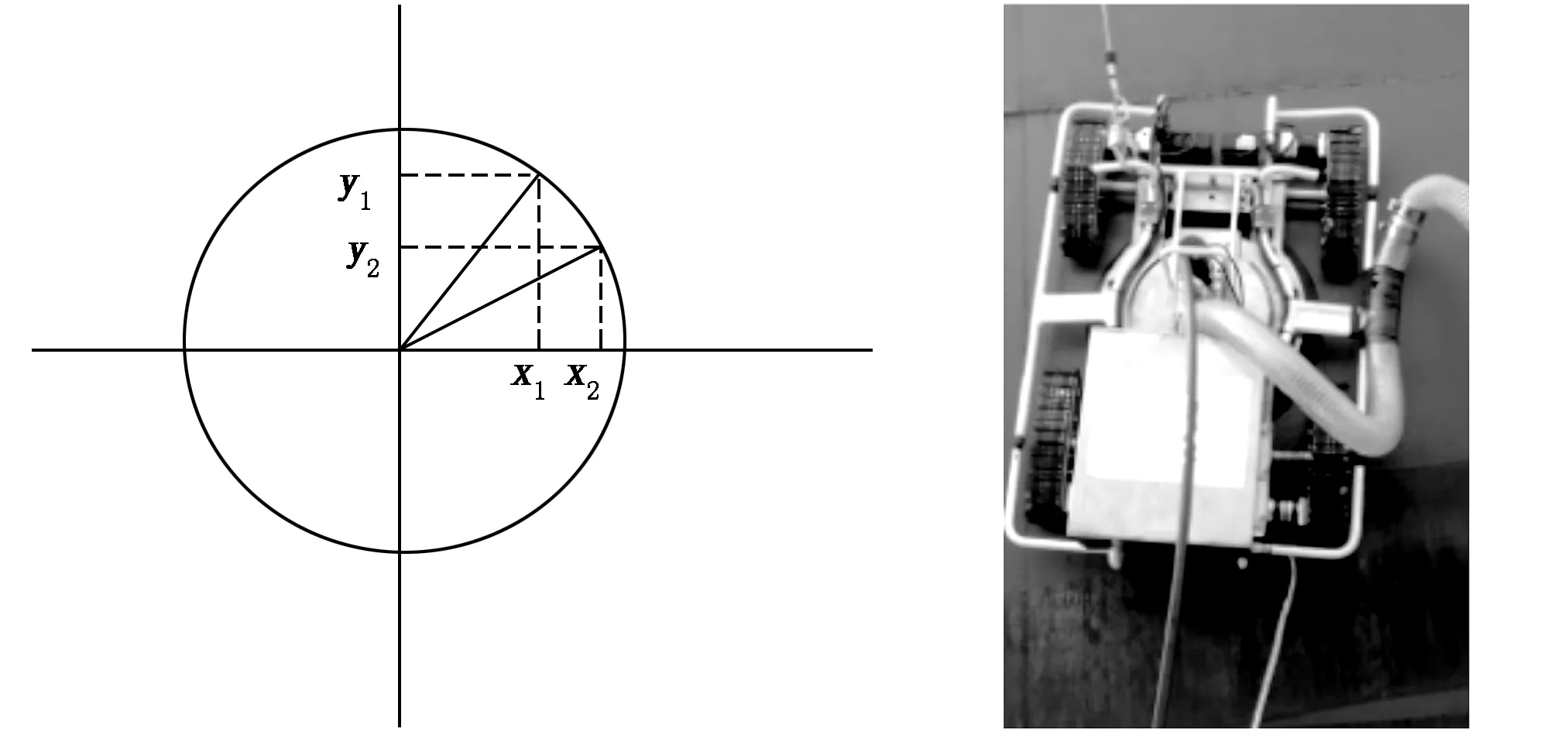
圖5 Q矩陣圖 圖6 JH-D400X-R4型六向搖桿內部示意圖
六向搖桿中包含3個10 kΩ滑動變阻器及1個按鍵,當電壓外加至滑動變阻器時,變阻器電壓會跟隨搖桿的移動而變化,以此控制爬壁機器人的運行指令。由于搖桿只用于控制爬壁機器人的移動方向,不能控制爬壁機器人的吸附強度,對搖桿驅動電路進行改進。搖桿驅動電路改進示意圖如圖7所示。
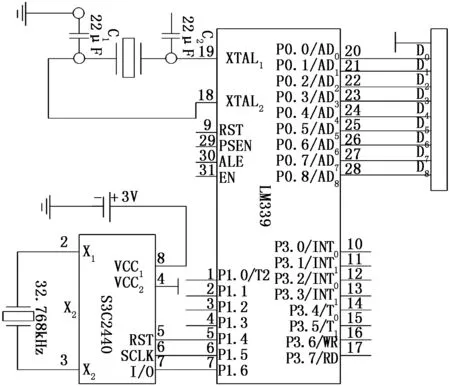
圖7 搖桿驅動電路改進示意圖
驅動電路中采用LM339芯片作為比較器,此芯片的輸入阻抗較大,電平轉換較快,能夠滿足對爬壁機器人的吸附控制。通過比較芯片轉換遙感輸出信號,并輸出開關信號至S3C2440芯片的端口。端口負責采集搖桿狀態變化信號,當搖桿發生變化時,S3C2440芯片端口利用ZigBee無線網絡將指令信號傳輸給下位機控制系統,下位機根據指令做出相應動作,控制爬壁機器人的吸附和移動功能。
5 實驗結果與分析
為了檢測文中基于System Vue的爬壁機器人控制器研究的研究效果,與傳統研究進行對比,并分析實驗結果。
5.1 裝置及參數
針對爬壁機器人機器轉化的特殊性以及控制器系統的研究特性,在實驗過程中應特別注意對其進行修護處理,并進行系統操作分析,為此,在System Vue中構建爬壁機器人控制器研究模型,對其進行理論性研究,如圖8所示。

圖8 控制器圖
根據上述實驗模型的建立,進行實驗參數的設定,如表1所示。
5.2 結果與分析
根據圖8構建的實驗模型進行對比實驗,將本文基于System Vue的爬壁機器人控制器研究的研究效果與傳統爬壁機器人控制器研究的研究效果進行比較,得到的控制器控制性能對比圖與控制時速對比圖如圖9和圖10所示。
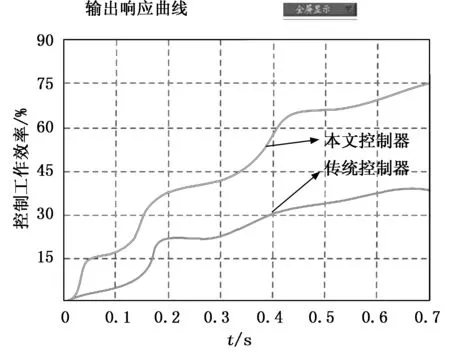
圖9 控制器控制性能對比圖
對比圖9可知,文中采用自動控制算法,將爬壁機器人運行過程中所產生的動作值函數與狀態值函數進行系統輸入操作,在最終的系統運行過程中對運動狀態進行策略性改正,并將控制器系統進行矯正性更改,同時將系統數據錄入最終系統,保持數據保持持續更新狀態,減少動作殘余值的影響。并將函數最大化,在一定程度上保證了系統能夠較為完整地體現控制系統的能動性,同時將控制信息快速收斂,獲取最終準確系統信息。在獲取信息的基礎上進行實驗,能夠更好地提升控制器系統的控制性能,減少不必要的系統數據浪費以及系統裝置損耗。而傳統研究不僅具備此項算法處理步驟,對于系統控制器的處理較差,控制器的控制性能較差。
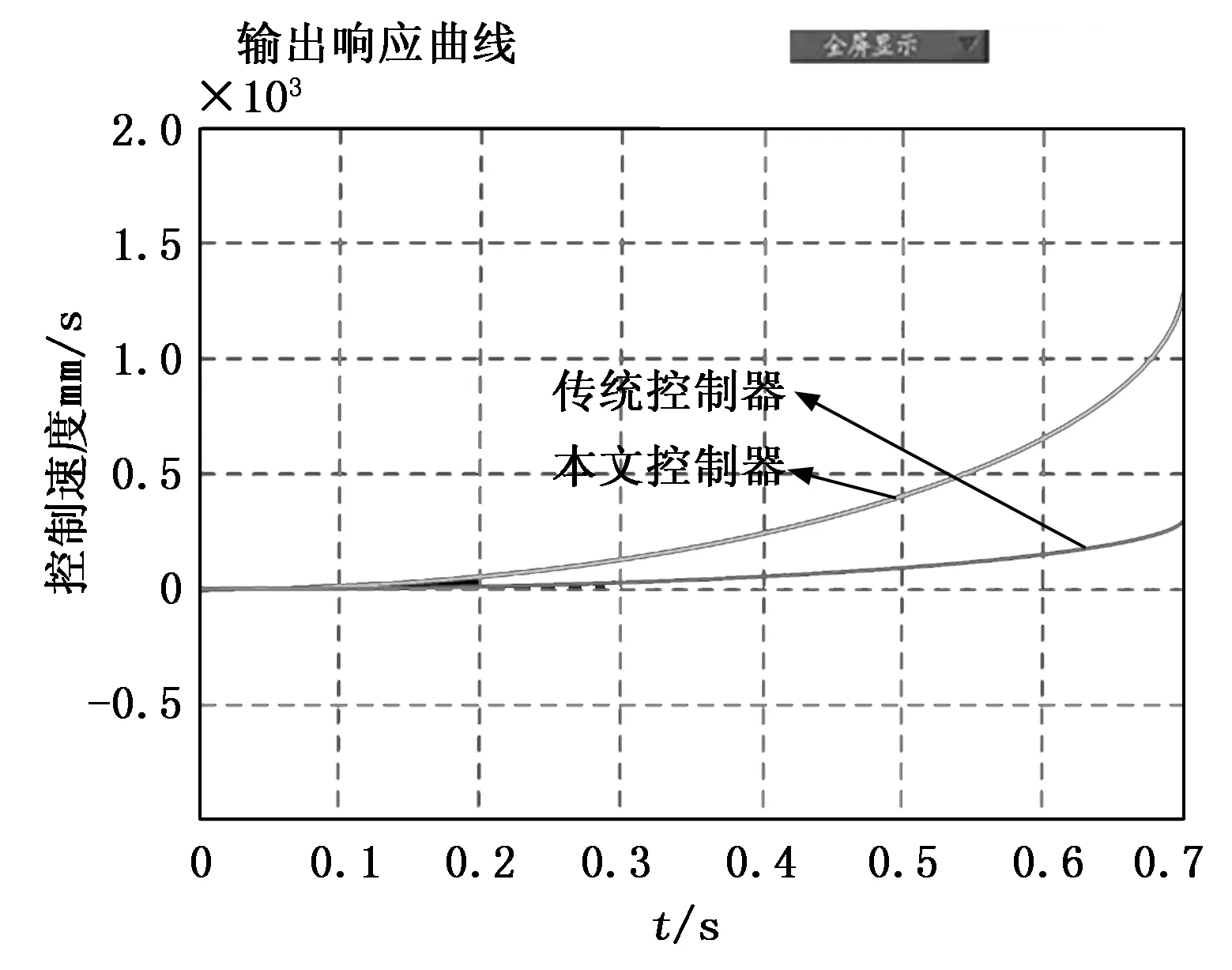
圖10 控制時速對比圖
對比圖10可知,在同一時刻,本文研究方法比傳統研究方法的控制時速明顯提高。造成此種差異的主要原因在于本文對爬壁機器人控制器進行自動尋跡模型的構建,并設置合理參數,將引導線進行二值化處理,以尋求其最佳控制系統方案。同時利用網格對其控制行蹤進行追蹤,利用模擬攝影機器將控制所得的數據信息進行系統采集,并分類處理。對動作值進行實際測量,在最終獲取的測量信息中對其進行系統比較,選取出較為集中的處理數據信息,進而提高控制器系統的準確性與高效性。在一定的時間處理下,本文研究對于控制器的綜合管理功能較強,并能夠在較快的速度內完成對控制器系統的管理,在此后的研究中,隨著研究時間的增加,本文研究方法的控制時速不斷提升,且一直位于傳統研究方法之上。除以上原因外,本文采用整體運動規劃的方法,對爬壁機器人控制器的運行軌跡進行系統性整合規劃,并進行一步提升其系統自控力,并對其動作軌跡與操作行程進行簡單追蹤,同時在一定程度上保持了控制器系統的穩定性與爬壁機器人本身綜合系統的敏捷度,將機身進行周期性轉換處理,根據仿生機器人步態與其相應的對角線步態進行系統性比較,以此找出控制系統中存在的隱藏性故障。轉變電機運動的時速,并增強時速運行系統,在高時速的狀態下提升系統的工作質量。而傳統研究方法對此的處理效果較差,在研究過程中忽略了對整體控制器系統工作的時效性處理,對于控制器時效性方面的研究較淺顯,最終研究的研究效果較差。
經過以上對比分析可知,本文研究方法的控制器控制性能與控制時速均位于傳統研究方法之上,能夠在較高的程度上增強控制器系統的整體工作性能,并對缺點因素進行較好的系統方法式處理,在理論研究的基礎山同時提升系統的工作時速,并進一步增強主動控制系統的能動性,促使系統能夠進行自我處理與保護,具備更加廣闊的使用市場以及較好的發展前景。
6 結束語
文中在傳統研究方法的基礎上進行了一種新式基于System Vue的爬壁機器人控制器研究,該研究方法的研究效果優于傳統研究方法。
首先對爬壁機器人進行控制器仿生模擬分析,對其控制器組成結構以及整體機體狀態進行系統分析,在結構構造仿生的過程中,正確處理步態規劃問題,并將二者結合,進而創建控制模型,并由此獲取所需參數,并對參數進行系統錄入處理,選擇合適的錄入數據放置到主控制中心系統中等待系統驗收,并獲取最終的正確參數。在參數獲取后,優化吸附控制算法,對其所進行的動作函數進行系統分析,以保證控制器系統能夠較好地完成系統所需任務,據此改進控制器硬件電路,最終達到對爬壁機器人控制器研究的目的。
相較于傳統研究方法,該研究方法能夠在較短時間內提升爬壁機器人控制器系統的系統性能,并進一步提升其控制的效能,在系統工作過程中加大對系統的自主保護,以提升整體控制器的工作效率,為今后的研究提供系統支撐,以期具備更佳的研究效果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(2019年12期)2019-12-25 03:06:46
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
