基于S7-1200 PLC下水道除污機器人控制研究
2020-06-08 02:27:12凌雙明
現代信息科技 2020年19期
摘? 要:城市化規模的不斷擴大導致下水道承載的排污量不斷增加,雨水季節到來時各種淤積物極易堵塞下水管道,為此設計了一款下水道除污機器人,可實現對地下管網的檢測、除污和疏堵。文章研究了以S7-1200 PLC為主控單元,結合工業以太網和伺服運動控制技術,并能實現觸摸屏組態無線監控的除污機器人控制系統。對機器人的末端執行機構與淤積物的排除能力進行了對比研究,設計了一種可以通過多種方式達到除污或去除堵塞的多功能機器人末端執行機構。
關鍵詞:下水道除污機器人;末端執行機構;S7-1200 PLC
Abstract:The continuous expansion of urbanization has led to an increase in the amount of sewage carried by sewers. When the rainy season comes,all kinds of sediments are easy to block the sewer. Therefore,a sewer decontamination robot is designed,which can realize the detection,decontamination and dredging of underground pipe network. The article studies a decontamination robot control system that uses S7-1200 PLC as the main control unit,combines industrial Ethernet and servo motion control technology,and can realize wireless monitoring with touch screen configuration. The end effector of the robot and the removal ability of sediment were compared and studied,and a multi-functional end effector of the robot that can achieve decontamination or removal of blockage in a variety of ways was designed.
Keywords:sewer decontamination robot;end effector;S7-1200 PLC
0? 引? 言
隨著我國城市化進程加快,城市規模越來越大,城市下水道堵塞問題沒有得到根本解決,堵塞的現象非常普遍,由于機器人在工業控制領域已經蓬勃發展,水下及特種機器人也得到了一定范圍的使用。國產下水道機器人目前正在起步階段,PLC作為工業自動化領域的通用控制器,應用非常廣泛,S7-1200 PLC不僅具備了運動控制、模擬量控制,而且網絡通信能力非常突出。通過S7-1200 PLC來實現對清污機器人自主作業控制展開研究,使該系統具備安全、高效、可靠、智能等特點,為我國城市管網行業機械設備的研制提供參考,對擺脫我國目前的智能清污機器人落后的現狀有較大的幫助。
研究履帶式小車為平臺的機器人除污裝置,其控制系統以S7-1200 PLC為主控單元,結合工業以太網技術、遠程無線遙控技術、機器視覺技術、伺服運動控制技術,可以實現對下水道機器人的控制,從而替代人工進入下水道清淤。機械手臂的設計及控制是機器人的關鍵環節之一,對下水道除污機器人的執行機構機械臂的結構和關節控制進行合理設計,可以使除污機器人的作業空間范圍得到有效提高,進而使作業的強度、力度、可靠性得到保障,同時也可以使除污機器人手臂的靈活度得到很大改善[1]。PLC結合步進驅動的控制系統讓機器人在下水道的彎曲管道作業時可以對垃圾和有害物堆積的死角進行有效的清理,降低清掃疏通的難度[2-4]。實際作業時,將該機器人放入管道內,此裝置能夠對管壁黏附物及堵塞情況,采用攝像頭探測管內工況,并根據管內工況,遠程監控調節機械臂與工作臺的位置,清理方式則采取旋轉機械臂,可以抓取堵塞物體,或者通過機械手臂上與強力泵連接的水管實現真空抽污,也可以通過連接在機械手上的水槍配合沖洗管壁,實現三種方式聯合除污或者去除堵塞物,達到疏通地下管網的目的。研究該課題可以幫助解決下水道污染,對環境保護有重大意義。本設計目前的開發進度是控制系統的軟、硬件設計和調試,下一步是結合控制系統和機械部分的裝置實物。
1? 除污機器人手臂設計
1.1? 機械臂的設計方案
機械臂的關節由伺服電機加控制器驅動;減速器作為傳動部件可以增大力矩,降低轉速,關節軸末端安裝的編碼器光柵可以反饋關節的位移和速度。關節外殼采用301不銹鋼材料并涂刷絕緣漆,起到在污水中作業時防腐蝕防銹的作用。關節部件的密封材料使用橡膠加機油密封。
1.2? 機械手臂的結構設計
本文所設計的機器臂安裝在下水道除污機器人上,如圖1所示,采用了3關節坐標型結構,包括第一關節G1、第二關節G2、第三關節G3。該結構可以使機器人手臂的自由度高,工作范圍大。其中第一關節可以環繞Z1軸線旋轉正200度至負120度;第二關節可以環繞Z2軸線旋轉正200度至負180度;第三關節可以環繞Z3軸線旋轉正200度至負110度。該機械手臂結構由于靈活度大,相比于挖掘機除淤泥和清理垃圾物的效率和清潔度有很大提高。
2? 除污機器人手臂末端設計
2.1? 機器人末端執行器手爪結構
如圖2所示,機器人末端執行器手爪包括:頂板、氣缸、活塞桿、連接板、側板、第一連桿、第二連桿、掛扣、拉簧、抓取板、導套。
頂板呈矩形板狀結構,氣缸設置在頂板的上側,氣缸與頂板通過螺栓固定相連接;活塞桿位于氣缸的下部,活塞桿與氣缸通過套合方式相連接;連接板設置在活塞桿的下方,連接板與活塞桿通過螺栓固定相連接;側板設置在連接板的側部,側板與連接板為一體式結構;第一連桿設置在頂板的側部,第一連桿與頂板通過轉軸相連接;第二連桿設置在第一連桿的下側,第二連桿與第一連桿通過轉軸相連接;掛扣設置在第二連桿的側部,掛扣與第二連桿通過焊接方式相連接;拉簧設置在側板與第二連桿的中部,拉簧與側板及第二連桿通過掛扣方式相連接;抓取板設置在第二連桿的下部,抓取板與第二連桿通過焊接方式相連接;導套設置在頂板的下側,導套與頂板通過螺栓固定相連接。
2.2? 機器人末端執行器優點
機器人末端執行器手爪結構,頂板呈矩形板狀結構,頂板的兩側設置有U形狀的連接座。連接板呈矩形板狀結構,連接板的兩側焊接有四處側板。側板、第一連桿、第二連桿、掛扣、拉簧及抓取板在頂板的左右兩側呈對稱設置。抓取板呈弧形板狀結構。手爪結構通過設置氣缸作為該機械手的驅動部件,其較現有的電機帶動絲桿實現抓取的機械手爪更為靈活,動作迅捷,結構簡單。通過將主動部件氣缸經連接板及拉簧連接至第一連桿,其結構為柔性連接,可有效避免因調整不當或錯誤抓取時造成機械手爪損壞,適用性強。本文設計的手爪通過對現有裝置的改進,具有結構簡單、動作靈敏、能夠防止手爪損壞、適應性強的優點。
3? PLC控制系統整體設計
3.1? S7-1200 PLC下水道清污機器人控制功能
PLC的型號選擇西門子公司的S7-1200系列,CPU選擇為1215C DC/DC/DC晶體管輸出型,版本號6ES7 214-1HG40- OXBO。14個數字量輸入和10個數字量輸出,自帶兩路模擬量輸入輸出信號。原位:電磁閥YV1、YV2、YV3、YV4、YV5以及電機M1、M2、M3、M4狀態均為OFF;十字搖桿、所有按鈕狀態均為OFF。十字搖桿移動到SQ1,機器人左直流電機M1、右直流電機M2前進;十字搖桿移動到SQ2,左直流電機M1、右直流電機M2后退;十字搖桿移動到SQ3,機器人右直流電機M2前進、左直流電機電機M1停止;十字搖桿移動到SQ4,機器人左直流電機M1前進、右直流電機M2停止。按下SB3按鈕,控制真空抽污電磁閥YV1工作,松開則停止工作。按下SB4按鈕,控制高壓水槍沖洗電磁閥YV2工作,松開則停止工作。按下按鈕SB5,控制升降臂控制閥YV3的上升,按下按鈕SB6,控制升降臂控制閥YV3的下降;按下按鈕SB7控制伸縮臂控制閥YV4的伸出,按下按鈕SB8控制伸縮臂控制閥YV4的縮回;按下SB9控制夾緊松開控制閥YV5的夾緊,按下SB10控制夾緊松開控制閥YV5的松開;PLC控制系統整體設計的功能框圖如圖3所示。
采用該控制系統可以遙控操作下水道清污機器人再管道中進行作業,無需工人進入下水道。機器人攜帶的攝像頭將畫面傳送到控制器屏幕后,控制者根據實時畫面確定垃圾或淤積物的位置,在觸摸屏上操控機械臂對主要淤積物清除后,控制高壓水槍抽污沖洗電磁閥打開,對管道壁進行沖洗或真空抽污,可以實現二次清理,保證了清污效果,使得地下管道清污變得安全、高效。徹底改變了以往人工對下水道清污不徹底、安全隱患大的問題。
3.2? 機械手伺服電機PLC程序設計
當按下按鈕SB5(圖中對應地址I0.4),伺服方向信號(圖中對應地址Q0.5)得電,收到左旋信號,當按下按鈕SB6(圖中對應地址I0.5),伺服方向信號(圖中對應地址Q0.5)失電,收到右旋信號,程序如圖4所示。
當按下按鈕SB1(圖中對應地址I0.4)或者SB2(圖中對應地址I0.5),中間繼電器(圖中對應地址M2.0)得電,并使其常開觸點閉合,執行脈沖輸出(圖中對應地址Q0.4),程序如圖5所示。
3.3? 機械手底座步進電機PLC程序設計
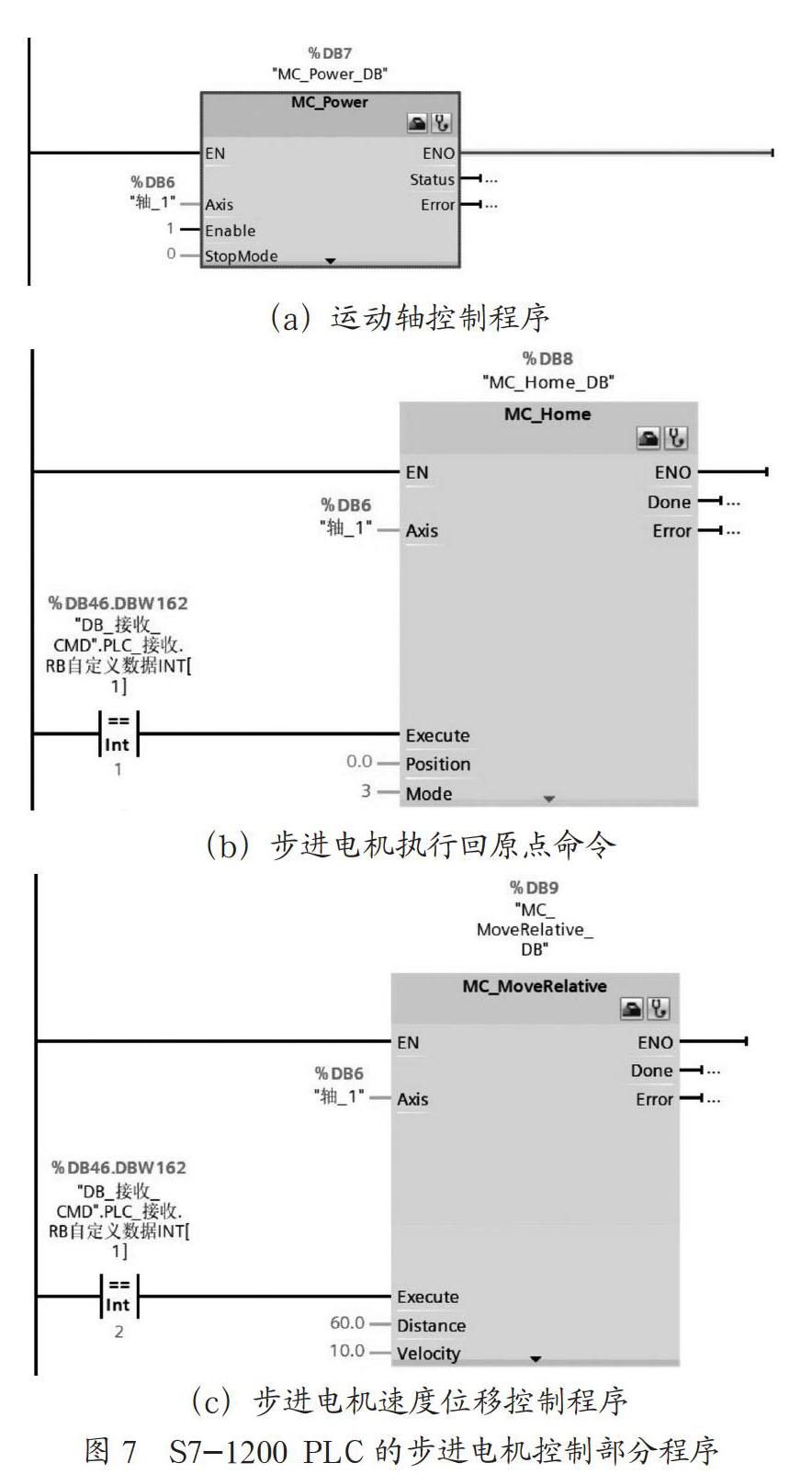
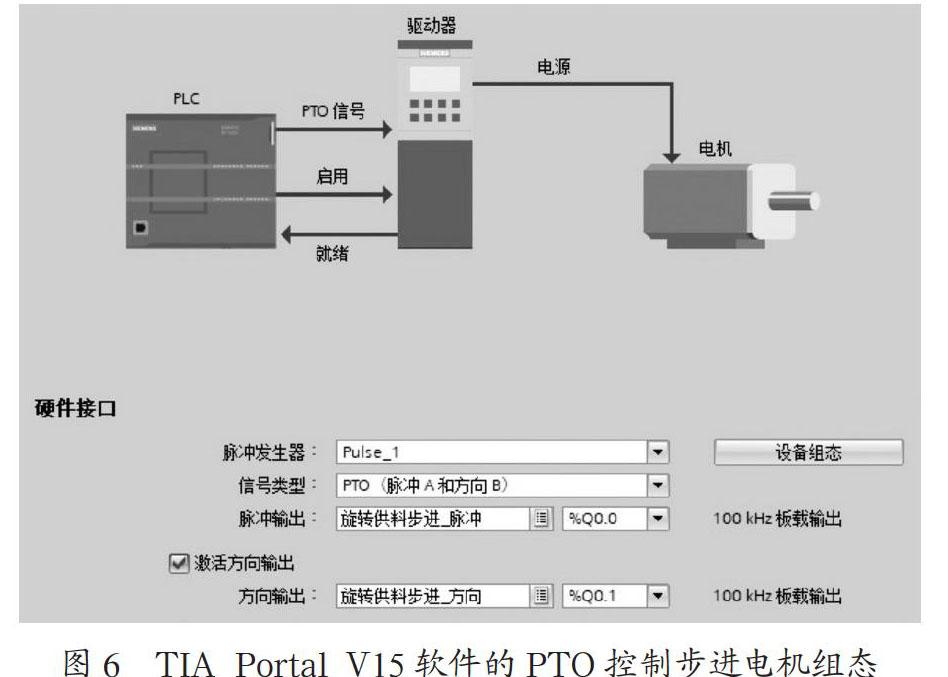
機器臂安裝在步進電機驅動的底座上,步進電機由PLC控制位移,這樣可以提高方向的精確度。步進電機的主要結構由PLC,步進電機模塊,驅動器、電源以及其他相關電路設備組合而成,系統的電源供應主要由UPS接口電源控制[5,6],該元件能夠保證系統任何階段的供電工作都是連續安全的。外部輸入設備包括正轉按鈕I0.3和反轉按鈕I0.4,在下水道的水下作業時采用觸摸屏遠程遙控操作。步進電機每轉的脈沖數6 400轉/分鐘,電機每轉的負載位移是1.5 mm,所允許的旋轉方向為雙向。設置硬件上限位開關輸入I0.0,硬件下限位開關輸入I0.1;最大轉速70°/s,最小轉速0°/s;啟動和停止時速度為0.703 125°/s。如圖6所示,通過TIA Portal V15軟件的PTO組態,PLC控制步進電機的脈沖輸出為Q0.0,方向信號為Q0.1。
步進電機控制程序如圖7所示,主要包括上使能數據塊DB7,PLC接收自定義數據進行比較。當比較值等于1時,步進電機執行回原點命令;當PLC接收到的自定義整數型數據比較值等于2時,步進電機執行位移控制,即以10 mm/s的速度移動60 mm;當PLC接收到的自定義整數型數據比較值等于3時,步進電機執行點動正轉;當PLC接收到的自定義整數型數據比較值等于4時,步進電機執行點動反轉。回原點執行完畢時,PLC發送1出去,接收到機器人終端信號反饋后發送數字0對DBW162進行清零。
3.4? 觸摸屏軟件設計
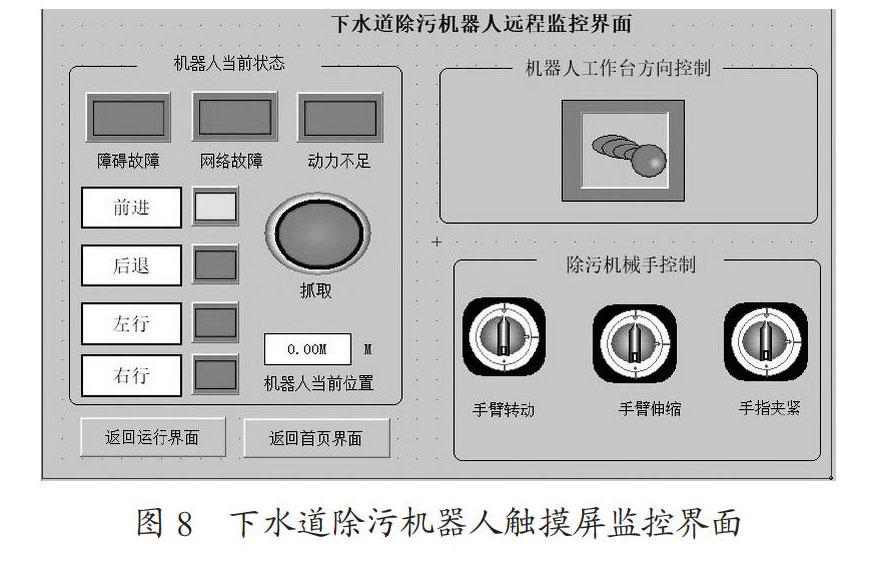
觸摸屏通過無線網橋進行中繼連接到PLC的接口,能監控機器人運動狀態,遠程控制機械手運動。如圖8所示,在TPC7062TI人機界面上組態畫面,要求用戶窗口包括機器人的工作狀態,如:障礙故障、網絡故障、動力不足,機器人車載平臺的運行指示和機械手的抓取指示,并能通過操作手柄實現對機器人車載平臺的操作,實現小車的前進后退、方向控制,除污機械手控制如伸縮、抓取等。點擊“返回運行界面”后,“運行模式”指示燈亮,如果系統網絡正常,經過授權的客戶組的權限檢查后,可以點擊“運行參數設置”按鈕進入運行參數設置。
5? 結? 論
本文主要闡述了S7-1200 PLC機器人控制系統的設計、多功能末端機械手執行機構的設計,及MCGS觸摸屏組態監控系統的設計,該設計綜合了機械部分和運動控制部分的軟、硬件設計,可以實現強力除污的目的,提高了機器人的工作效率,節約了人力物力,有較好的應用和推廣價值。
參考文獻:
[1] 丁祥青,馬莉.采摘機器人機械手結構設計與分析 [J].機床與液壓,2017,45(23):40-42.
[2] 申少魁.PLC控制系統在機器人上的應用 [J].南方農機,2018,49(16):3.
[3] 徐玉如,李彭超.水下機器人發展趨勢 [J].自然雜志,2011,33(3):125-132+2.
[4] 趙德安,沈甜,陳玉,等.蘋果采摘機器人快速跟蹤識別重疊果實 [J].農業工程學報,2015,31(2):22-28.
[5] WALTERS P,KAMALAPURKAR R,VOIGHT F,et al. Online Approximate Optimal Station Keeping of a Marine Craft in the Presence of an Irrotational Current [J]. IEEE Transactions on Robotics,2018,34(2):486-496.
[6] KNUDSEN K B,NIELSEN M C,SCHJOLBERG I. Deep Learning for Station Keeping of AUVs [C]// OCEANS 2019 MTS/IEEE SEATTLE. IEEE,2019.
作者簡介:彭小平(1978—),男,漢族,湖南衡陽人,副教授,本科,研究方向:電氣自動化;凌雙明(1983—),女,漢族,湖南長沙人,副教授,本科,研究方向:工業機器人技術。
猜你喜歡
兒童故事畫報·發現號趣味百科(2025年8期)2025-08-23 00:00:00
青少年科技創新報(2024年23期)2024-07-12 00:00:00
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
少年文藝·我愛寫作文(2017年6期)2017-06-12 23:21:56
Coco薇(2017年5期)2017-06-05 08:53:16
商業評論(2014年9期)2015-02-28 04:32:41