防擺吊具剛?cè)狁詈蟿?dòng)力學(xué)分析與結(jié)構(gòu)拓?fù)鋬?yōu)化
2020-06-09 12:20:59田昊許平陳國(guó)鼎賀伯林袁紅超
軟件 2020年2期
田昊 許平 陳國(guó)鼎 賀伯林 袁紅超
摘 ?要: 傳統(tǒng)吊裝夾具應(yīng)用在有色金屬板電解、檢測(cè)、分揀等工序的搬運(yùn)等過(guò)程,易會(huì)出現(xiàn)擺動(dòng)磕碰等情況,需要設(shè)計(jì)一種在吊裝運(yùn)動(dòng)過(guò)程中可以防止金屬板擺動(dòng)和減少對(duì)金屬板表面質(zhì)量損壞的防擺機(jī)構(gòu)。通過(guò)在Pro/E中建立吊裝夾具三維模型并裝配出整體機(jī)構(gòu),由于防擺機(jī)構(gòu)在工況下高速運(yùn)動(dòng)并且為薄板零件,所以通過(guò)柔性體替代剛體進(jìn)行動(dòng)力學(xué)分析,以模仿真實(shí)運(yùn)動(dòng)情況。利用HyperMesh做模態(tài)分析,導(dǎo)出MNF文件到 ADAMS中,建立機(jī)構(gòu)的剛?cè)狁詈夏P汀?dòng)力學(xué)分析輸出各構(gòu)件在防擺機(jī)構(gòu)夾緊運(yùn)動(dòng)過(guò)程中各鉸接處的受力情況以及接觸處的沖擊載荷。利用OptiStruct進(jìn)行拓?fù)鋬?yōu)化使得機(jī)構(gòu)整體結(jié)構(gòu)減重48.1%,減輕工業(yè)機(jī)器人的工作負(fù)載,減少對(duì)金屬板表面的沖擊,以獲取更好的運(yùn)動(dòng)性能。
關(guān)鍵詞:?吊具;防擺;剛?cè)狁詈?拓?fù)鋬?yōu)化;ADAMS;HyperWorks;OptiStruct
中圖分類號(hào): TH113.2????文獻(xiàn)標(biāo)識(shí)碼:?A????DOI:10.3969/j.issn.1003-6970.2020.02.043
【Abstract】:?Traditional hoisting jig will swing and bump in the handling process of non-ferrous metal plates in the electrolysis, detection, sorting and other processes. It is necessary to design an anti-swing mechanism which can prevent the metal plate from swinging and reduce the damage to the metal plate surface quality in the lifting movement. The three-dimensional model of the hoisting jig is established in Pro/E and the whole mechanism is assembled. Since the anti-pendulum mechanism moves at high speed under the working condition and is a thin plate part, the rigid body is replaced by flexible body for dynamic analysis to imitate the real motion. Using HyperMesh for modal analysis, the MNF file was exported to ADAMS, and the rigid and flexible coupling model of the mechanism was established. Dynamic analysis of the output components in the anti-swing clamping motion of each hinge and the impact load at the contact. Using OptiStruct for topological optimization, the overall weight loss structure of the mechanism is 48.1% to reduce the load of industrial robots, reduce the impact on the surface of metal plates, and obtain better motion performance.
【Key words】: Spreader; Anti-swing; Rigid and flexible coupling; Topological optimization; ADAMS; HyperWorks; OptiStruct
0??引言
電解金屬板的吊具主要應(yīng)用于對(duì)電解后剝離母板并安裝吊裝耳環(huán)的高純度金屬板在后續(xù)加工、檢測(cè)、分揀、包裝過(guò)程中的吊裝作用,其對(duì)傳統(tǒng)冶金行業(yè)實(shí)現(xiàn)自動(dòng)化起到至關(guān)重要的作用。現(xiàn)有吊具在工作過(guò)程中由于只吊取耳環(huán)上橫梁的位置使得金屬板在被吊取運(yùn)動(dòng)過(guò)程中發(fā)生慣性擺動(dòng),這在空間有限的工廠環(huán)境中很容易發(fā)生磕碰情況,稀有純金屬一般質(zhì)地較軟并且質(zhì)量大易發(fā)生變形,對(duì)后續(xù)加工產(chǎn)生不必要的麻煩。但增加防擺機(jī)構(gòu)又使得吊具重量大增,同時(shí)可能在夾緊過(guò)程中對(duì)金屬板面造成沖擊變形,并且對(duì)工業(yè)機(jī)器人的功率型號(hào)和能耗提出更高的要求,這時(shí)就很有必要借助優(yōu)化設(shè)計(jì)的手段對(duì)防擺機(jī)構(gòu)進(jìn)行優(yōu)化。
結(jié)構(gòu)優(yōu)化技術(shù)是當(dāng)前CAE技術(shù)發(fā)展的一個(gè)熱點(diǎn),OptiStruct采用數(shù)學(xué)規(guī)劃方法,通過(guò)求解靈敏度構(gòu)造近似顯式模型,采用小步長(zhǎng)迭代找到最優(yōu)解,是目前工程上高效、穩(wěn)健的優(yōu)化方法,在工業(yè)界中的應(yīng)用也逐漸成熟[1]。利用結(jié)構(gòu)優(yōu)化技術(shù)進(jìn)行結(jié)構(gòu)設(shè)計(jì),可以在設(shè)計(jì)前期就參與到結(jié)構(gòu)參數(shù)的確定,為設(shè)計(jì)的分析改進(jìn)節(jié)省時(shí)間,降低吊具重量和制造成本,使結(jié)構(gòu)設(shè)計(jì)更加合理、經(jīng)濟(jì)。本文通過(guò)ADAMS剛?cè)狁詈戏抡婧蚈ptiStruct拓?fù)鋬?yōu)化分析,得到了吊具的夾緊、沖擊雙工況優(yōu)化結(jié)果,并對(duì)優(yōu)化結(jié)果進(jìn)行了對(duì)比,可為類似結(jié)構(gòu)優(yōu)化設(shè)計(jì)和現(xiàn)實(shí)生產(chǎn)提供參考。
1??防擺機(jī)構(gòu)剛?cè)狁詈辖<胺抡?/p>
1.1??防擺機(jī)構(gòu)剛?cè)狁詈夏P徒?/p>
ADAMS柔性模塊是采用模態(tài)來(lái)表示物體彈性的,它基于物體的彈性變形是相對(duì)于連接物體坐標(biāo)系的彈性小變形。其基本思想是賦予柔性體一個(gè)模態(tài)集,采用模態(tài)展開法,用模態(tài)向量和模態(tài)坐標(biāo) 的線性組合來(lái)表示彈性位移,通過(guò)計(jì)算每一時(shí)刻物體的彈性位移來(lái)描述其變形運(yùn)動(dòng)[2]。
2.2.1??設(shè)計(jì)變量
厚度和體積是執(zhí)行力臂的主要結(jié)構(gòu)參數(shù),是在規(guī)定的載荷條件下,保證結(jié)構(gòu)強(qiáng)度和剛度以及使用壽命的基本條件。本次優(yōu)化設(shè)計(jì)選擇的設(shè)計(jì)變量為除鉸孔周圍預(yù)留區(qū)域的其余部分。
2.2.2??約束條件
大臂約束最小厚度為6?mm,末端與回轉(zhuǎn)鉸接處全方向最大位移為4?mm,并設(shè)置加工方向?yàn)楹穸确较颉P”?和小臂2約束最小厚度,末端與回轉(zhuǎn)鉸接處全方向最大位移為2?mm,并設(shè)置對(duì)稱中心面。將迭代次數(shù)上限設(shè)置為500確保完全迭代,停止迭代條件為近10次求解相近停止。
2.2.3??優(yōu)化數(shù)學(xué)模型
優(yōu)化設(shè)計(jì)有三要素,即設(shè)計(jì)變量、目標(biāo)函數(shù)和約束條件。設(shè)計(jì)變量是發(fā)生改變從而提高性能的一組參數(shù);目標(biāo)函數(shù)要求最優(yōu)的設(shè)計(jì)性能,是關(guān)于設(shè)計(jì)變量的函數(shù);約束條件是對(duì)設(shè)計(jì)的限制,是對(duì)設(shè)計(jì)變量和其他性能的要求。優(yōu)化數(shù)學(xué)模型可表述為:
2.3??拓?fù)浣Y(jié)果分析
大臂優(yōu)化歷程經(jīng)過(guò)了148次迭代,小臂1經(jīng)歷了46次迭代,小臂2經(jīng)歷了57次迭代實(shí)現(xiàn)了結(jié)果穩(wěn)定收斂[8-9]。鑒于線性屈曲分析得到的臨界屈曲載荷是非保守的,通常比結(jié)構(gòu)的承載能力大,一般是穩(wěn)定承載能力上限[10]。根據(jù)對(duì)拓?fù)鋬?yōu)化結(jié)果向上圓整的思想和對(duì)機(jī)構(gòu)進(jìn)行可加工性設(shè)計(jì)得到結(jié)構(gòu)與設(shè)置合適的w,得到最優(yōu)解密度對(duì)照?qǐng)D如圖4所示[11]。新結(jié)構(gòu)中大臂重量由2.73?kg減重到1.17?kg減重57.2%;小臂1重量由1.75?kg減重到1.34?kg減重24.5%;小臂2重量由1.99?kg減重到1.10?kg減重44.8%,兩個(gè)防擺機(jī)構(gòu)執(zhí)行力臂重量由18.4kg減重到9.56?kg減重48.1%。
2.4??減重后的動(dòng)力學(xué)仿真對(duì)比
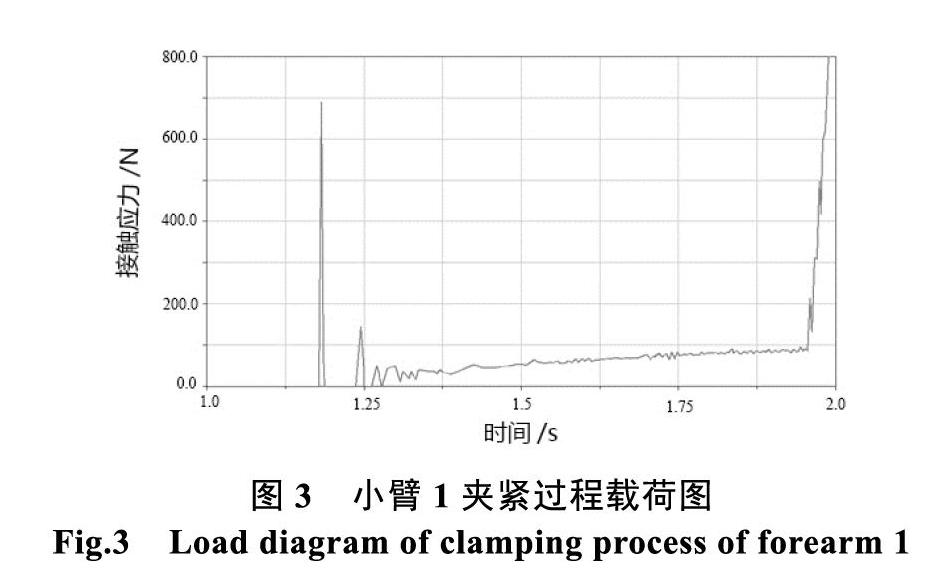
將拓?fù)鋬?yōu)化后的新結(jié)構(gòu)通過(guò)HyperMesh進(jìn)行柔性化,沿用之前的剛?cè)狁詈蟿?dòng)力學(xué)模型以柔性體替換柔性體的方式進(jìn)行替換如圖5所示[12]。圖6圖7是防擺機(jī)構(gòu)原始結(jié)構(gòu)和優(yōu)化結(jié)構(gòu)的沖擊載荷變化規(guī)律。
由圖7可知,較原始結(jié)構(gòu)由于改變機(jī)構(gòu)質(zhì)心和減輕機(jī)構(gòu)質(zhì)量,新機(jī)構(gòu)中小臂1和小臂2在前期波動(dòng)環(huán)節(jié)都有參與,接觸應(yīng)力峰值明顯降低,由685?N降低到275?N,降低幅度40.1%。并且由于改變機(jī)構(gòu)質(zhì)心,新機(jī)構(gòu)中小臂1和小臂2在前期波動(dòng)環(huán)節(jié)都有參與,對(duì)金屬板或機(jī)架沖擊情況得到較大改善,但是總波動(dòng)次數(shù)有所增加。沖擊載荷峰值發(fā)生在即將夾緊的時(shí)間段,說(shuō)明由于慣量的減少使得之前的運(yùn)動(dòng)處于圍繞鉸接處的往復(fù)旋轉(zhuǎn)運(yùn)動(dòng),使得更快進(jìn)入穩(wěn)定階段。
3 ?結(jié)論
(1)根據(jù)柔性體建模基本理論,通過(guò)有限元分析軟件HyperMesh生成關(guān)鍵部件的柔性體,在動(dòng)力學(xué)分析軟件 ADAMS 平臺(tái)上,使用虛擬樣機(jī)技術(shù),建立了一款防擺吊具剛?cè)狁詈戏抡婺P汀?/p>
(2)采用OptiStruct軟件對(duì)防擺吊具進(jìn)行拓?fù)鋬?yōu)化設(shè)計(jì)分析,通過(guò)設(shè)置合適參數(shù)優(yōu)化出符合加工要求的最優(yōu)結(jié)構(gòu)。
(3)對(duì)優(yōu)化結(jié)果通過(guò)ADAMS進(jìn)行了動(dòng)力學(xué)驗(yàn)證,最后得出機(jī)構(gòu)在運(yùn)動(dòng)過(guò)程中的沖擊載荷明顯降低,同時(shí)機(jī)構(gòu)重量得到減輕,可為類似結(jié)構(gòu)優(yōu)化設(shè)計(jì)提供參考。
參考文獻(xiàn)
閆利, 馬愛(ài)軍. 基于OptiStruct的載人航天環(huán)境模擬艙結(jié)構(gòu)優(yōu)化設(shè)計(jì)[J]. 航天醫(yī)學(xué)與醫(yī)學(xué)工程, 2017, 30(4): 283-286.
劉俊, 林礪宗, 劉小平, 等. ADAMS 柔性體運(yùn)動(dòng)仿真分析 研究及運(yùn)用[J]. 現(xiàn)代制造工程, 2004(5): 53-55.
丁壽濱, 常宗俞, 武雅潔, 等. ADAMS與常用CAD軟件之間的接口[J]. 微計(jì)算機(jī)信息, 2005, 21(10-3): 202-204.
畢厚煌, 何家寧, 譚蓉, 等. 基于 ABAQUS 和 ADAMS 的懸臂式起重機(jī)結(jié)構(gòu)設(shè)計(jì)與 剛?cè)狁詈蟿?dòng)力學(xué)分析[J]. 機(jī)械設(shè)計(jì), 2017, 34(11): 16-21.
董玉紅, 許洪濤, 張立勛, 等. 大型零件搬運(yùn)裝配的智能輔助設(shè)備防擺控制[J]. 哈爾濱工程大學(xué)學(xué)報(bào), 2009, 30(6): 681-685.
李增剛. ADAMS入門詳解與實(shí)例[M]. 北京: 國(guó)防工業(yè)出版社, 2006: 125. l
曾攀, 雷麗萍, 方剛. 基于 ANSYS 平臺(tái)有限元分析手冊(cè)結(jié) 構(gòu)的建模與分析[M]. 北京: 機(jī)械工業(yè)出版社, 2011.
韓婷. 基于ANSYS的車架拓?fù)鋬?yōu)化設(shè)計(jì)[D]. 武漢: 武漢 理工大學(xué), 2013.
林丹益. 汽車發(fā)動(dòng)機(jī)支架拓?fù)鋬?yōu)化及有限元分析[D]. 杭 州: 浙江工業(yè)大學(xué), 2013.
林利紅, 文琴, 王成. 圓鋸片結(jié)構(gòu)拓?fù)鋬?yōu)化[J]. 機(jī)械設(shè)計(jì), 2018, 35(6): 24-28.
季武強(qiáng). 飛機(jī)機(jī)翼結(jié)構(gòu)拓?fù)鋬?yōu)化方法研究及其實(shí)現(xiàn)[D]. 沈陽(yáng): 沈陽(yáng)航空航天大學(xué), 2013.
嚴(yán)宏志, 朱翰成, 葉輝. 4自由度機(jī)器人剛?cè)狁詈戏抡婕敖Y(jié)構(gòu)改進(jìn)[J]. 機(jī)械設(shè)計(jì), 2015, 32(3): 56-61.