農業果樹采摘機器人功能實現及試驗研究
2020-06-11 03:46:00陳振鵬
農機使用與維修 2020年6期
陳振鵬


摘?要:水果產業是農業生產的經濟型產業,也是提高人民生活水平、保持社會穩定的重要產業。針對傳統人工采摘水果效率低下、經濟成本高的問題,說明了自動采摘水果機器人研究的必要性,并給出了果樹采摘機器人功能實現主要方式,對主要的技術參數作出了試驗驗證方法與思路。
關鍵詞:農業;果樹采摘機器人;功能;技術實現;試驗
中圖分類號:TP241文獻標識碼:A
doi:10.14031/j.cnki.njwx.2020.06.013
隨著生活水平的提升,水果已成為我國人民生活中必不可少的食品,我國蘋果、梨、橘子等眾多水果產量位居世界前列。對于現階段的水果生產而言,大規模果園的生產耗費了大量的人力資源,且采摘過程的經濟成本很高,尤其對于水果采摘來說,更是費時費力,且很多水果具有明顯的時令性,快速采摘也成為了保證其高品質銷售的基礎。針對這一問題,我國對于水果采摘機器的研究也投入了大量的人力物力,相關的研究已達30年以上,現階段對于蘋果、橘子、西紅柿等的采摘機器人理論研究已十分豐富,相信相關機具的普及也會很快實現。
1?果樹采摘機器人的研究情況
我國現階段對果樹采摘機器人的研究多來自于科研院所及各大高校的農機專業,相關研究重點在于采摘動作執行、果實識別、自動導航行駛等方面。研究的難點問題包括:(1)自動識別技術受環境影響較大,光照條件、樹葉遮擋、果實形狀顏色不同都會影響視覺識別的準確性;(2)采摘方式的柔性化。由于采摘不能破壞水果表面,對于脆嫩、形狀各異、位置不同的水果,需要實現無害化的采摘;(3)機械手需具備良好的避障能力。在滿足高效率采摘的過程中,機械手執行動作還必須避開樹枝的遮擋,避免對機械手造成損壞,或對采摘的水果造成刮傷。
目前來看,水果采摘機器人的機械結構和自動化技術發展已比較成熟,但是智能識別技術、水果識別算法、避障技術的研究還需突破關鍵技術,才能保證水果采摘機器人技術得到全面提升,并為未來產業化提供足夠的技術保證。
2?關鍵技術實現方式
2.1?基本結構
果樹采摘機器人由三大部分組成,分別為移動平臺、機械臂、識別及控制系統,如圖1所示。移動平臺是采摘機器人運行的基礎,采摘機器人的行駛動力和運轉電能均來自于移動平臺。通常情況下移動平臺包括了常規底盤結構,如傳動結構、車輪或履帶和功能部件安裝架體,能夠在實現行使功能的同時為控制系統和機械手臂提供充足的安裝位置,并具有一定的功能擴展能力。機械臂安裝于移動平臺上,能夠實現升降、旋轉、伸縮等多種功能,以保證采摘手在特定空間范圍內到達任意位置,滿足對果實的采摘要求。識別及控制系統主要用來定位目標水果位置,控制采摘機器人行駛至目標附近,并由機械手臂完成采摘工作。
2.2?關鍵技術的實現
2.2.1?機械臂的動作執行
隨著技術的進步,機械臂的設計也越來越科學化,其形式和功能也多種多樣,本次研究采用了典型的機械臂結構以實現動作執行的相關要求。圖2為機械臂結構,其主要包括了電動推桿、伺服電機、臂體、扭轉電機、座板等幾大部分,電動推桿主要實現伸縮的功能,而伺服電機起到豎直方向位置的調節,扭轉電機實現水平方向的轉動,以此實現空間范圍上使采摘手到達指定區域的任意位置,以便于通過采摘手夾持水果并利用電動刀具實現梁柄切割。除此之外,機械臂整體可以在移動平臺上通過氣缸升高,以滿足不同高度果實采摘的需求。
2.2.2?移動平臺的結構與功能
移動平臺設計有兩種方案,分別為傳統輪式移動平臺和橡膠履帶式移動平臺,為適應果園地形的復雜要求,橡膠履帶式移動平臺具有更好的適應能力,應用可靠性更高。橡膠履帶具有很長的使用壽命,通常能達到5000 h以上,由于履帶結構與地面接觸面積大,能顯著的減少運行過程的振動,同時有利于保護果園的地表狀態,在濕潤泥濘的路面行駛能力強,有利于作業速度的提升。移動平臺上層架體結構具備了安裝機械臂固定座、氣缸體、水果收集筐、控制系統裝置和視覺識別系統裝置的接口,可實現快速裝配要求,同時,架體上還預留了技術升級的空間位置,供后續功能升級使用。
2.2.3?自動控制系統技術設計
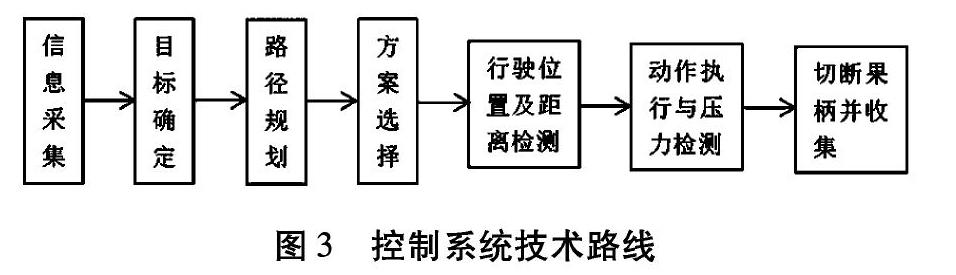
自動控制系統主要包括三大部分,分別為數據采集系統、數據分析處理系統和輔助系統,控制系統技術路線設計如圖3所示。
(1)數據采集系統包括以下幾大主要功能部件:一是位于平臺中部的雙攝像頭視覺傳感器,用以獲取果樹的具體信息,通過高清攝像頭獲取圖像,分析并獲得目標位置;二是位于視覺傳感器下方的定位傳感器,用于確定目標與機器人的相對位置,為系統線路規劃提供位置數據;三是位于機械臂采摘手上的觸覺傳感器和壓力傳感器,通過力敏電阻技術精確監測采摘目標果實的受力狀態,當夾持壓力達到預設值,可控制刀具將果柄切斷,完成采摘要求。
(2)數據分析處理系統通過主控計算機分析特定數據實現路徑規劃、圖像處理、機械臂運動學計算、伺服控制、反饋信息和傳感器信息的處理等功能。相關程序有專業技術人員編制,以滿足對不同水果、不同品種之間的差異化要求。控制過程采用了臺達交流伺服系統與交流伺服驅動器配合,能可靠實現位置、速度、轉矩的控制要求,通過RS-422串行通信技術,實現了將機器人運行狀態信息和故障情況傳遞給主監控系統,以實現便捷的狀態觀察和故障維護。
(3)輔助系統有以下幾部分組成:一是動力電源,為控制和行駛、機械臂動作提供能源支持;二是氣泵,為升降功能的氣缸提供氣動支持;三是報警指示燈,為可能出現的故障問題提供警報;四是人工手動遙控器,可實現人工近距離對機器人的控制。
3?試驗研究
采摘試驗在室內進行,采用塑料仿真果樹代替真實果樹,為保證試驗數據的合理性,采摘試驗共進行10次,分別對于不同位置的蘋果進行識別、定位、采摘與收集。試驗中通過筆記本電腦監控識別與決策過程,實際試驗數據如下表所示,采摘過程共識別蘋果62個,成功完成采摘56次,成功率較高。
對于采摘失敗的原因進行分析,可能原因包括:(1)蘋果生長位置附近環境因素較復雜,枝葉干擾過多易引起機械手受力而偏離采摘方向,導致采摘任務的失敗;(2)光影的變化導致果實實際位置的判斷存在偏差,使機械手采摘時的預判位置錯誤,導致末端執行器不能捕獲目標果實;(3)移動平臺在行駛中無法到達預期采摘位置,導致采摘行為無法執行;(4)測距傳感器在執行采摘過程中檢測到機械臂進入距離警戒值,發出警報,導致采摘過程中斷。
室內仿真實驗過程與實際果園環境仍存在較大差異,但也具有一定的指導意義,經分析當械手末端位置滿足采摘要求時,成功率很高,未來采摘機器人的優化應重視通過性能和避障性能的研究,以進一步提升果樹采摘機器人的工作能力。
4?結論
通過介紹果樹采摘機器人的應用及功能實現方法,闡述了現代化技術在果樹采摘機器人上的應用情況,說明了現階段實際應用面臨的難題,通過試驗驗證盡管水果采摘成功率較高,但成功與否仍受環境影響較大。對采摘機器人的進一步研究應以實際生產環境為試驗對象,從而提升機具的應用能力和適用性,保證相關產品能更好的應用于市場。
參考文獻:
[1] 趙德安, 姬偉, 陳玉,等. 果樹采摘機器人研制與設計[J]. 機器人技術與應用, 2014(5):29-33.
[2] 李國利, 姬長英, 顧寶興,等. 多末端蘋果采摘機器人機械手運動學分析與試驗[J]. 農業機械學報, 2016, 47(12):14-21.
[3] 馬強. 蘋果采摘機器人關鍵技術研究[D]. 北京:中國農業機械化科學研究院, 2012.
[4] 羅大偉, 姬偉, 李俊樂,等. 蘋果采摘機器人末端執行器抓持規劃研究[J]. 信息技術, 2015(1).
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2021年13期)2021-08-14 01:38:18
今日農業(2020年15期)2020-12-15 10:16:11
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
