車道保持系統研究
2020-06-11 00:44:28季鑫
汽車實用技術 2020年10期
季鑫


摘 要:為了減少由于駕駛人分心或疲勞造成的車道偏離事故,提出一種車道保持控制系統。根據道路線性將道路分為直線路段和曲線路段,利用跨道時間來判斷車輛將偏離車道;駕駛員的操作狀態根據轉向燈信號及轉矩信號來進行判斷。綜合車道偏離信息與駕駛員操作信息來判斷車道保持系統是否工作;車道保持系統的控制策略采用單點預瞄最優曲率駕駛員模型。仿真結果表明,模型能夠實現車道保持功能。關鍵字:車道保持系統;駕駛員模型;聯合仿真
中圖分類號:U462.1 ?文獻標識碼:A ?文章編號:1671-7988(2020)10-46-03
Research on lane keeping Assistance system
Ji?Xin
( School of Automobile, Changan University, Shaanxi Xian?710064?)
Abstract:?In order to reduce lane departure accidents caused by driver distraction or fatigue,we study Lane Keeping Assistance System. This article divides the road into straight sections and curved sections according to road linearity, and uses cross-lane time to judge whether the vehicle is in danger of deviating from the lane. The driver's operation state is judged based on the signal signal and the torque signal, and the information of the lane departure is combined with the driver's operation information to judge whether the lane keeping system is working. The control strategy of lane holding system adopts the optimal curvature driver model with single point preview. Simulation results show that the model can realize lane keeping function.
Keywords:?Lane-keeping system; Driver model; Co-simulation
CLC NO.: U462.1 ?Document Code:A ?Article ID: 1671-7988(2020)10-46-03
1 引言
車道保持輔助系統(Lane Keeping Assistance System,LKAS)的發展基于車道偏離預警(Lane Departure Warning System),是防止車輛在正常的行駛過程中由于車道偏離發生交通事故。車道偏離預警系統能提醒駕駛員,車輛此時有駛出當前車道的危險,以此來提高車輛主動安全,降低車輛因偏離車道而引發交通事故的概率[1]。車道保持系統能在車輛偏離車道線且駕駛員未采取相關措施時,接管車輛進行控制,使車輛回到車道中心線行駛。本文基于Carsim與MATLAB/?Simulink的聯合仿真,驗證車道保持控制系統控制策略的正確性。
2 車道保持系統的控制策略
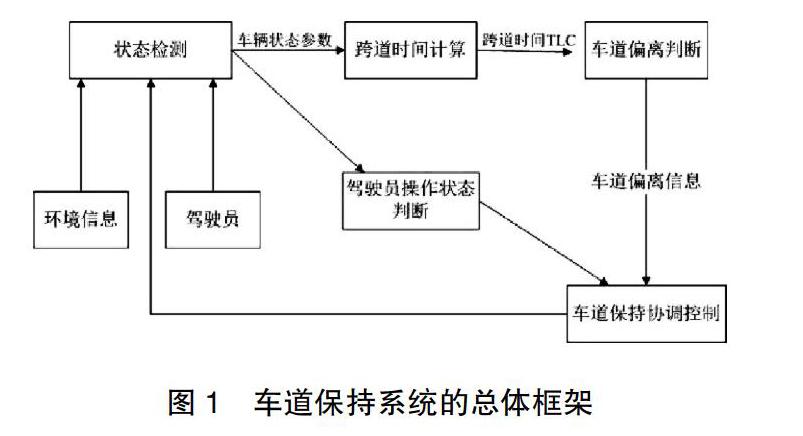
車道保持系統是根據車-路相對位置以及車輛的當前狀態參數來計算車輛的跨道時間,從而判斷車輛是否會發生車道偏離。為保障駕駛員操作的最高優先級,首先需判斷駕駛員是否主動操控車輛,綜合車道偏離信息來決定車道保持系統是否接管車輛。若車道保持系統接管車輛,則處于自動轉向模式,根據車道保持控制算法,計算此時車輛的理想方向盤轉角,作用于車輛,使方向盤轉動相應角度,從而回到道路中心行駛。具體框架如圖1所示。
根據駕駛員是否打開轉向燈來判斷駕駛員的操作狀態。轉向燈打開則認為駕駛員正主動操縱車輛,駕駛員優先控制車輛,按照駕駛員的意圖進行超車或換道,該情況下即使跨道時間小于設定閾值,系統也不會發生預警及干涉。如果駕駛員未打開轉向燈進行換道或超車,認為駕駛員無意識操作車輛,車道保持系統起作用。此外,駕駛員遭遇緊急情況時,雖然未打開轉向燈,但駕駛員作用于轉向盤上的力矩要比正常駕駛時更大,因此通過轉向盤上的轉矩來判斷駕駛員是否正在進行緊急操縱[2]。
本文選擇的車道偏離的判斷模型為基于車輛跨越道路邊界線的時間模型即TLC模型[3]。通過建立車輛運動學模型,根據當前車輛的行駛軌跡來預測將來車輛的行駛軌跡,并計算車輪接觸車道邊界線的最小時間即跨道時間(Time to Lane Cross,TLC)。如果TLC值大于設定閾值,則不發生車道偏離。如果計算得到的TLC值低于設定閾值,說明車輛有駛出當前車道的趨勢,發生車道偏離。
本文選擇郭孔輝提出的單點預瞄最優曲率駕駛員模型作為車輛控制方法[4]。
通過對駕駛員模型的分析,我們最終可得最優方向盤轉角:
d為距離,δ代表方向盤轉角,i表示轉向系傳動比,L代表軸距。
3 仿真實驗設計
設計車道保持系統的前提條件是建立人-車-路的閉環系統,該閉環系統包括以下模型:車輛模型、道路模型、駕駛員模型、車-路相對位置模型。
3.1?車輛模型
本文的車輛動力學模型基于車輛動力學仿真軟件Carsim搭建的,Carsim中車輛模型精度較高,提供的信息包括偏航角、縱向速度、側向速度等。本文使用某款轎車的主要參數如表1所示。除了上述的結構參數,制動系統、動力系統和空氣動力學特性等參數選擇默認值。
3.2?道路模型
道路模型是車輛在仿真行駛中的環境,也是車輛在行駛過程中的參考路徑。道路模型可以根據輸入的數據生成精確的空間三維路面模型,在該模型中,包括道路的線形、道路的縱斷面、道路的橫斷面,此外還可以對路面附著系數、道路的起伏等參數進行設置。本文建立了直線段模型與曲線段模型,直線段為100m的直線路段,曲線段為曲率半徑為900m的圓弧段路段。
3.3?駕駛員模型
駕駛員模型根據是否含有預瞄環節可以分為預瞄跟蹤模型和補償跟蹤模型兩大類,本文選擇駕駛員預瞄跟蹤系統中的最優預瞄模型。在預瞄時間內,確定車輛的運動狀態及其與車道的相對位置,然后建立車輛的目標側向位置與實際側向位置間偏差,從而算出方向盤轉角。在曲線路段的仿真計算中,加入了PID反饋控制,使得車輛模型能夠更好的跟蹤預先設定的路徑。
3.4?車-路相對位置模型
車-路相對位置模型即跨道時間模型。跨道時間的計算要基于車輛模型和車輛運動狀態,在預測過車輛的運動軌跡之后,計算車輛從當前位置行駛至車輪接觸道路邊界線所需要的時間。
3.5?仿真模型
具體的仿真分為直線路段與曲線路段兩個模塊,由于曲線路段的模型較為復雜,加入了PID反饋控制。
4 仿真結果
4.1?仿真結果
仿真工況:車速72km/h,仿真時間25秒,預瞄時間為0.8s在仿真開始時,方向盤初始角度為0°,在車輛行駛2秒時給轉向系統一個向左的階躍輸入,使車輛向左偏離車道,在車輛行駛13秒時給轉向系統一個向右的階躍輸入,使得車輛向右偏離車道,且在車輛向左或向右偏離道路的過程中不干預車輛運動,通過車道保持算法主動糾正車輛的動作。
在車輛行駛的2s,車輛開始向左偏移,當車輛運動到5s時偏移接近到離車道邊界線,車道保持系統開始起作用,主動控制車輛,經過約3s時間車輛回到道路中心線,然后沿車道中心線行駛。在車輛行駛12s的時候,給車輛向右的偏離量,偏移過程及車道保持系統的作用過程跟車輛向左偏離類似,此處不再具體講述。
4.2?車道保持系統的魯棒性驗證
4.2.1 坡度對車道保持系統控制算法的影響
根據公路工程技術標準(JTG B01-2003)規定,二級公路(平原微丘區)設計時速60km/h的最大縱坡,應不大于6%,在本文中,取坡度為5%,其他條件不改變。
當道路坡度為5%時,直線路段的仿真結果與無坡度時直線段的仿真結果幾乎一樣,在2s時,車輛向左偏到5s偏移接近到離車道邊界線,車道保持系統開始起作用,主動控制車輛,經過3s時間使得車輛回到道路中心線,然后沿著車道中心線行駛。行駛12s時,車輛向右偏離,當車輛運動到16s時偏移接近車道邊界線,車道保持系統主動控制車輛,經過3s時間使得車輛回到道路中心線。因此認為坡度對車道保持控制算法準確度的影響不大。
4.2.2 車速及預瞄時間對車道保持系統控制算法的影響
在上文的研究中,車速都為72km/h,預瞄時間為0.8秒。在本節中,將驗證在不同車速下車道保持系統的魯棒性,并驗證本文預瞄時間的準確性。
當預瞄時間為0.8s時,在不同速度下,車道保持控制系統都能及時響應,但隨著速度增加,車輛回正時超調量增大,高速行駛時,車輛不能很好的跟隨車道中心線行駛,會在車道中心線附近波動。
對比同一車速下不同預瞄時間車道保持系統的控制效果,預瞄時間越長,回正時間越大,車輛平順性越好,且中低速時,預瞄時間長,控制效果更好,高速行駛時,預瞄時間短,控制效果更好。本文所采取的0.8s處于中間值,能較好的適應不同車速的需求,選擇較為合理。
5 結論
本文設計了車道保持系統的模型框架,并在Carsim中完成搭建車輛模型、道路模型,在Simulink中完成搭建駕駛員模型、跨道時間算法模型,然后進行Carsim/Simulink聯合仿真實驗。實驗結果證明,基于跨道時間算法和單點預瞄模型的車道保持系統基本能實現車道保持的功能,有利于減小車道偏離事故發生的概率。
參考文獻
[1] Gonzalez-Mendoza M,Jammes B, Hernandez-Gress N,et al.A comparison of road departure warning systems on real driving conditions[C]//Intelligent Transportation Systems, 2014. Proceed?-ings.The 7th International IEEE Conference on. 2004:349-354.
[2] 黃楊成.基于電動助力轉向系統的車道偏離輔助系統的研究[D].合肥工業大學,2017.
[3] Mammar S,Glaser S, Netto M, et al. Time-to-line crossing and vehicle dynamics for lane departure avoidance. IEEE Intelligent Transportation Systems Conference, Washington, D.C.,USA, Octo?-ber?36,2004.
[4] 郭孔輝.駕駛員-汽車閉環系統操縱運動的預瞄最優曲率模型[J].汽車工程,1984, (3):1-16.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
