
特種車輛無縫對接系統研究與優化
2020-06-11 00:44:28張澤仲張曉艷卞學良
汽車實用技術 2020年10期
張澤仲 張曉艷 卞學良
摘 要:根據車型數據設計特種車輛無縫對接系統及其運動規律。針對系統結構分析載荷力的傳遞過程,推算驅動裝置電動推桿的受力情況,利用MATLAB/ SIMULINK進行數學建模仿真驗證是否符合電動推桿的額定推力,最后將所建結構模型利用ADAMS軟件進行結構優化,從而得到符合要求的最優結構。
關鍵詞:輪椅舉升裝置;數學建模;動力學仿真
中圖分類號:U462 ?文獻標識碼:A ?文章編號:1671-7988(2020)10-102-04
Research and optimization of special vehicle seamless docking system
Zhang Zezhong1,?Zhang Xiaoyan2,?BianXueliang2
(1.China Automotive Technology and Research?Center?Co.,?Ltd,?Tianjin 300300;2.Hebei University?of?Technology,?Tianjin 300401)
Abstract:?Design of the system and its movement rules of the disabled person's seamless system based on the vehicle data. According to the load transfer process analysis system structure, and calculate the driving force of the electric push rod device. The use of MATLAB/ SIMULINK mathematical modeling and verification to verify whether the thrust force of the electric push rod meet requirements. Finally, the structural model is optimized by ADAMS software, and the optimal structure is obtained.
Keywords:?Wheelchair lifting device;?Mathematical modeling;?Dynamic simulation
CLC NO.: U462 ?Document Code: A ?Article ID: 1671-7988(2020)10-102-04
前言
近年來,中國殘疾人數不斷上升,隨之而來殘疾人出行問題越來越受到關注,輪椅已成為殘疾人出行必備工具,而人力輪椅無法滿足長途出行,故需要設計使輪椅與車輛友好對接設備。日本本田公司,日本豐田公司及美國harmar公司都研發出了類似產品。本文設計了一種舉升裝置是輪椅能夠進入車輛,并通過對特種車輛無縫對接系統進行設計仿真優化得到系統的最優模型。
1?設計要求
特種車輛無縫對接系統要求升降平臺從地面升至車廂地板平面過程符合人體所能承受的運動范圍,輸入功率盡可能小,傳遞效率盡可能高,在滿足工況要求的情況下盡可能使結構簡單緊湊。
該系統工作行程為升降平臺降至地面,輪椅駛入升降平臺,升降平臺托舉輪椅上升至于車廂地板水平接合,待輪椅駛入車廂后,升降平臺收起,工作行程結束。
此無縫對接系統安裝在某車型上,根據車型數據決定對接系統主要參數如表1所示。
2?對接系統設計方案
對接系統裝配于車尾,輪椅駛入升降平臺,升降平臺連同由電動推桿推動舉升至與車廂地板水平接合后,輪椅駛入駕駛室,之后對接系統收起,使占用空間最小。
2.1 蹬車升降裝置設計
蹬車升降裝置采用對稱的雙四桿機構,由電動推桿驅動主臂、拉臂、及升降平臺的運動,機構如圖2所示:
2.2 建立電動推桿位移模型
蹬車機構結構簡圖如圖3:
升降平臺垂直位移y:
升降平臺水平位移x:
其中lAB=506mm、lAC=370.6mm、lAE=113.4mm、α=66.06°、γ=4.581°,聯立以上三式,由matlab求得s與x,y間關系:
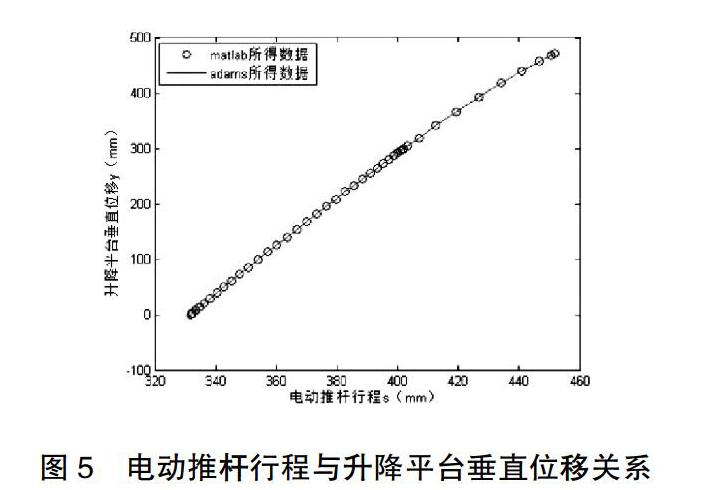
利用MATLAB所得函數作圖與ADAMS仿真所得比對,將Adams所得圖形數據導入matlab與數學模型對比結果如圖4、圖5:
由對比圖知所建數學模型精度達到要求,數學模型可正確表達運動關系。
2.3 系統運動規律設計
根據加速度舒適性評價及相關方面的研究,取蹬車過程垂直方向急動度j=0.6m/s3,最大加垂直速度不超過0.6m/s2,最大垂直速度不超過1.75m/s。
蹬車過程升降平臺升至車廂地板高度,豎直位移y=300?mm,根據位移與急動度關系公式:
由此計算出急動度轉變時間點,并由下式計算蹬車過程平臺垂直加速度:
可得:
曲線如圖6所示:
將垂直加速度函數進行兩次積分,可得垂直位移y關于時間t的函數:
與式(2)、式(3)聯立,可得水平位移x與時間t的函數及主臂升角(β-α-γ)關于時間t的函數:
對水平位移函數k(t)求二階導數可得水平加速度關于時間t的函數:
2.4 建立電動推桿運動推力模型
欲分析電動推桿受力,即主臂上c點受力,現逆向推算即由升降平臺承受負載推算主臂受力。
隔離升降平臺進行受力分析:
設負載輪椅及人總重120kg,每側裝置分配載荷60kg,隔離舉升平臺進行受力分析,升降平臺受力分析簡圖如圖7所示,其中l1=70.34mm,l2=101.16mm,l3=393.2mm,l4=?338.8mm。
豎直方向慣性力Fy及水平方向慣性力Fx:
根據達朗貝爾原理,可得:
根據式(11)可得FFy與FFx關系:
聯立式(17)、(18)可得:
將FFy、FFx帶入式(15)、(16),即可求出升降平臺與主臂鉸接點B受力:
隔離主臂進行受力分析:
主臂結構簡圖如圖8所示:
由達朗貝爾原理:
已知lAC=370.75,lEC=s,由根據余弦定理可得:
由式(4)(10)聯立解得:
將其帶入式(24)可得:
又因為:
將其帶入式(23)中即可得出:
求得v(t)即為電動推桿推力關于時間的函數。
將以上公式導入MATLAB/SIMULINK中進行數學建模并輸入加速工況及負載如圖9所示:
用此模型模擬蹬車過程,設置仿真時間2.52s,運行模型結果如圖10所示:
圖形表明推桿的最大推力不超過2900N,符合電動推桿的額定推力。
3?利用ADAMS進行仿真優化
為了將電動推桿的最大推力降低,以改善各構件工作狀態將ADAMS中所建模型進行優化,主要考慮主臂與支座鉸接點A,主臂與電動推桿鉸接點C,電動推桿與支座鉸接點E:
(1)將A、C、E點設置為參數化點,并根據車型參數確定優化范圍,設置如表2:
(2)將以上6個變量依次設計研究得出敏感度如表3:
由此可見電動推桿力的變化相對DV_2、DV_5、DV_6三個變量最敏感。
(3)對敏感變量進行優化
設置對電動推桿最大推力進行最小化優化,設計變量為DV_2、DV_5、DV_6,優化結果如表4:
優化后電動推桿受力曲線與優化前電動推桿受力曲線對比如圖11。
由表4和圖11可以看出,優化后電動推桿最大推力由2868.97N降至2183.74N,降幅達到23.9%,且力的變化更平緩,優化基本達到了效果。
4 結語
此文介紹的特種車輛無縫對接系統,設計了升降平臺的運動規律,分析系統結構并利用MATLAB軟件建立了系統的數學模型,再通過動力學仿真軟件ADAMS驗證數學模型并優化,在符合車型參數的情況下最大限度降低電動推桿的載荷,改善其工作環境,優化效果顯著。
參考文獻
[1] 李彩峰.新型車載輪椅自動升降機的設計與研究[D].西北農林科技大學,2009.
[2] 謝慧萍,季英瑜.基于ADAMS軟件的六連桿沖壓機構的優化設計[J].輕工機械,2009,(02):47-50.
[3] 應樂安,王成燾.電梯加速度舒適性評價的生理心理學研究[J].機械設計與研究,2008,(01):106-107+111.
[4] 邵堃,張祥,冷雷波,侯計成,王文忠.車載式輪椅自動升降機的研制[J].機械設計,2007,(08):63-65.
[5] 佘守憲,董水金.變加速動力學與舒適性問題[J].物理與工程,2006,?(06):35-37.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
