
阿克曼轉向模型的改進及其電子差速控制仿真
2020-06-11 00:44:28薛昊淵連晉毅王嘉侖任艷強
汽車實用技術 2020年10期
薛昊淵 連晉毅 王嘉侖 任艷強


摘 要:分布式驅動電動汽車作為純電動汽車未來主要的發展方向,對其輪轂電機的轉速控制和轉向性能的研究是當前的熱點之一。文章在阿克曼轉向原理的基礎上,提出一種改進的阿克曼轉向模型,并在MATLAB/Simulink中搭建仿真模型,對前輪轉速進行控制。將改進前后兩種模型得到的車速結果與CarSim中相同工況下得到的仿真結果進行比較,發現改進后的轉向模型在車輛中低速運行時,前輪轉速能很好的滿足實際轉向要求、實現車輛的平穩轉向。這說明,筆者提出的基于阿克曼轉向原理的改進模型對研究分布式驅動電動汽車的轉向控制策略有一定的借鑒意義和參考價值。
關鍵詞:阿克曼轉向模型;改進;電子差速;建模仿真
中圖分類號:TP391.9 ?文獻標識碼:A ?文章編號:1671-7988(2020)10-118-04
Electronic Differential Control Simulation Based on Improved AckermanSteering Model*
Xue Haoyuan, Lian Jinyi*, Wang Jialun, Ren Yanqiang
( Taiyuan University of Science and Technology, Shanxi Taiyuan 030024 )
Abstract:?As the main development direction of pure electric vehicles in the future, distributed drive electric vehicles, the research on the speed control and steering performance of their hub motors is an essential research hotspot. Based on the Ackerman steering principle, this paper proposes an improved Ackerman steering model, and builds a simulation model in MATLAB / Simulink to control the front wheel speed. The vehicle speed results obtained from the two models before and after the improvement are compared with the simulation results obtained under the same conditions in CarSim. It is found that when the improved steering model runs at low speed in the vehicle, the front wheel speed can well meet the actual steering requirements and achieve Steering of the vehicle. This shows that the improved model based on the Ackerman steering principle proposed by the author has certain reference significance and reference value for studying the steering control strategy of distributed electric vehicles.
Keywords: Ackerman steering model; Improvement; Electronic differential; Modeling and simulation
CLC NO.: TP391.9??Document Code: A ?Article ID:?1671-7988(2020)10-118-04
1 引言
近年來,分布式純電動汽車作為新能源汽車領域的主要發展方向,在實現零排放、低污染的同時,又具有傳動鏈短、驅動效率高的特點[1]。為了提高汽車的能源利用率和行駛性能,文獻2[2]以阿克曼轉向模型為基礎,設計了一種速度滑模控制器,并利用Simulink搭建了差速轉向仿真模型,進行蛇形工況實驗,將仿真結果并與傳統PI控制差速轉向結果作對比,首先證明了等效滑膜控制的正確性與可行性,可以實現轉向要求。文獻3[3]中使用了CANoe-MATLAB接口軟件,利用Simulink建立后輪獨立驅動的差速模型,并利用CAN模塊對建立的模型進行封裝處理,使其自動生成執行代碼,再將生成代碼加載到CANoe電子差速節點中進行仿真,仿真結果顯示,該模型能夠完成輕型低速電動汽車差速功能。文獻4[4]則利用Simulink建立差速轉型模型,測試不同轉速以及轉角下,阿克曼轉向原理可否適用,結果顯示,基于阿克曼原理所設計的模型只適用于低速靜態下的電動汽車仿真,而當車速過高或轉角過大時,外側車輪轉速會產生較大偏差,導致車輛無法安全完成轉向。上述工作只是在理論層面分析了阿克曼轉向原理的適用性,未能與實際數據作對比,本文在上述工作的基礎上,提出一種改進后的阿克曼轉向模型,并在Simulink完成建模,將所建立的模型與CarSim進行聯合仿真比較,結果顯示這改進后更好地滿足好的滿足轉向要求。
2 阿克曼轉向原理的數學模型
阿克曼原理是由德國車輛工程師“Lankensperger”于1817年提出的,指在車輛轉彎時每個車輪繞同一中心轉動,從而保證輪胎與地面之間無滑動摩擦而處于摩擦力最小的純滾動狀態[5]。
阿克曼轉向原理是在假定汽車前輪定位角為0、汽車行駛系統為剛性、汽車行駛中無側向力的情況下,四輪繞同一圓心作純滾動運動。以此來做模型的簡化[6]。轉向原理如1所示。
圖1中,o為轉向與圓心,L為車輛軸距,σ為車輛轉向角,R0為質心轉彎半徑,a為前軸到質心距離,b為后軸到質心距離,c為后軸軸距,Rx為轉向中心到后輪距離,其中a、b和L為車輛參數,直接設置,σ則由駕駛員輸入,控制器采集得到。α,β則是前輪兩側轉角,根據輸入的轉角信號計算得到。
由幾何關系得:
根據速度瞬心特性可知,各質點的速度之比等于各點到瞬心的距離之比,可得:
由上述(1)-(3)式可得:
3 改進的阿克曼轉向模型
由上述阿克曼轉向原理可知,汽車在轉向時轉向角決定了轉向圓圓心o的位置,從而決定了前輪的轉彎半徑。由于阿克曼轉向原理是在理想的情況下所建立的,適用于較低速的情況。基于此,筆者對上述阿克曼轉向模型進行改進,令兩前輪轉角一樣大,均視為轉向角,改進后的模型如圖2所示。
圖2中,o為轉向圓心,o'和o''為前輪內外側車輪的轉向圓心,α為車輛轉向角,R為質心轉彎半徑,b為后軸到質心距離,L為車輛軸距,c為后軸軸距。
由幾何關系得:
4 MATLAB/Simulink的仿真模型建立與分析
4.1 Simulink參數設置
Simulink是MATLAB中包含的一種可視化仿真工具,它向用戶提供一個動態系統建模、仿真和綜合分析的集成環境,在這一環境中我們無須編寫大量程序只需選取適當的庫模塊,就可以構造出復雜的仿真模型[7]。本文所搭建的模型數據基于某型A級乘用車,其質量為750kg;軸距為2570mm;輪距為1508mm;后軸到質心距離為1564mm。
4.2 Simulink模型搭建
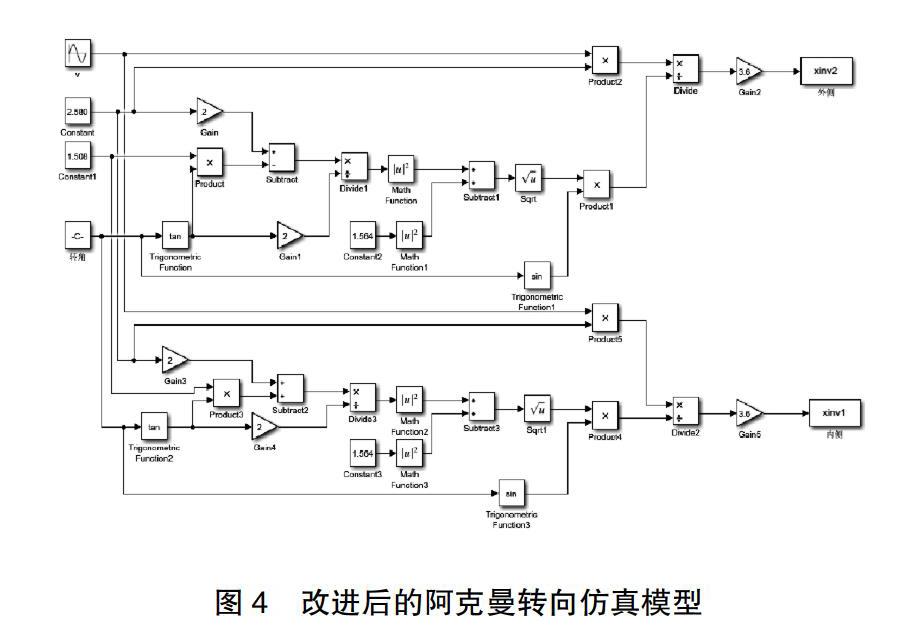
基于上述參數,以車速和轉角為輸模型輸入,以前輪轉速為模型輸出,根據第二部分以及第三部分得到的關系式,搭建如下模型,其中圖3為基于阿克曼原理的轉向仿真模型,圖4為改進后的阿克曼轉向仿真模型。
4.3 Simulink仿真結果
確定車輛轉向角為10°,讓車速從0起步加速到10m/s,記錄四輪的轉速,如圖5所示。
由MATLAB/Simulink的仿真結果可以看出,在確定汽車轉向角及車速的情況下,可以得到汽車前輪轉向角以及四輪的相應轉速。圖4在定轉角的情況下改變車速,可以看到,前輪轉速大于后輪轉速,外側車輪轉速大于內側車輪轉速,內側轉角大于外側轉角,滿足公式(3),符合車輛實際情況。
5 CarSim模型建立與對比分析
5.1 CarSim模型的建立
CarSim是一款專業的汽車動力學仿真軟件,主要采用面向系統的建模方法。軟件結構主要分為圖形用戶界面、車輛數學模型、求解器三方面[8]。在CarSim中可以直接選取A級乘用車并設置參數,車身參數模型如圖6所示,主要參數包括軸距,后軸到質心距離以及輪距。
車身模型建立后,點擊“Procedure”按鈕,選擇模擬過程,設置車速由0到10m/s,轉角設置縱坐標為角度恒定為10°如圖7、8所示。其中橫坐標均為時間由0到10s。
5.2 兩種控制策略的對比分析
點擊CarSim中的“send to Simulink”按鈕,將CarSim的仿真結果導入Simulink中,比較改進前后前輪的轉速與實際轉速的差值。前輪內側轉速對比結果如圖9所示,其中橫坐標為實際車速,縱坐標為兩種控制策略下不同車速與實際車速的差值。差值越小則說明控制效果越好,汽車不易打滑,轉向越安全。
由圖9可以看出,在低速運行時,基于阿克曼原理的轉向控制效果較好,與實際誤差小,在車速22Km/h以下時,最大誤差不超過0.3Km/h,汽車可以安全轉向,當速度為22Km/h時,誤差為0.1km/h。隨著速度增加,基于阿克曼原理的轉向控制會產生較大的誤差,當速度達到25Km/h時,誤差達到2.17km/h,此時汽車會產生打滑等現象,存在一定風險。相比于原模型,改進后的阿克曼模型在低速時與原模型基本一致,隨著速度增加,相比于原模型誤差有明顯減少,當速度同樣達到25Km/h時,誤差為1.9km/h,誤差了降低11.5%。
6 結論
針對前述改進的阿克曼轉向模型,并通過Simulink與CarSim聯合仿真驗證可知:
(1)阿克曼轉向模型只適合于低速轉向,當速度超過22km/h時,電動汽車的差速效果比較差,會產生打滑等現象,無法完成安全轉向。
(2)相比于原阿克曼轉向模型,改進后的阿克曼轉向模型,與實際的轉速差值較小,尤其是在中高速時對電動汽車的轉向性能有較大的改善。
參考文獻
[1] 陳辛波,劉浩,鐘再敏,王心堅,谷成.分布式驅動電動汽車的開發和行駛能耗優化分析[J].汽車技術,2014(07):39-43.
[2] 趙琦.四輪轂驅動電動汽車差速助力轉向與轉矩協調控制研究[D].安徽工程大學,2018.
[3] 許忪,張政.基于CANoe-MATLAB的電動汽車電子差速仿真[J].自動化與儀器儀表,2015(02):189-191.
[4] 華磊,張成濤,陸文祺,王佳奇.輪轂電機電動汽車電子差速低速轉向控制仿真[J].廣西科技大學學報,2018,29(03):77-81.
[5] 苗立東,章曾,吳曉輝,石沛林.非阿克曼幾何狀態下汽車車輪受力[J].科學技術與工程,2017,17(31):359-363.
[6] 姜明國,陸波.阿克曼原理與矩形化轉向梯形設計[J].汽車技術,?1994(05):16-19.
[7] Anonymous. MATLAB: A Practical Introduction to Programming and Problem Solving, 5th Edition[J]. Chemical Engineering Progr?-ess,2018,114(10).
[8] Li Junwei, Yang Huafang.Fuzzy logic applied to yaw moment control for vehicle stability[C].Mechatronics and Automation, 2009. ICMA 2009. International Conference on.2009.
[9] 陳哲明,周鵬,陳寶,付江華.汽車四輪獨立轉向穩定性控制策略研究[J].計算機仿真,2018,35(07):93-97+147.
[10] 王海濤,陳哲明.汽車轉向機構仿真及優化設計[J].計算機仿真,?2013,30(03):162-165+200.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
