大蒜定向種植扶正入土裝置
2020-06-22 08:35:52河北農業大學趙一州張寅馬攀
河北農機 2020年5期
河北農業大學 趙一州 張寅 馬攀
1 研制背景及意義
大蒜具有豐富的營養成分,獨特的口感,具有殺菌、抑菌等醫療保健功能,因此大蒜越來越受到世界各國人民的喜愛,市場需求也在不斷增加,種植面積呈逐年上升趨勢[1]。然而,我國的大蒜生產主要依靠人工勞動,不利于農業現代化和新農業的發展。為此,我國研制了適應大蒜生產需要的機械設備和工具,實現了大蒜產業化生產,滿足了大蒜種植者的需求,提高了大蒜機械化生產水平,形成大蒜種植、地膜覆蓋、收獲等關鍵技術產業鏈[2]。
根據農藝學要求,蒜瓣背面靠緊溝壁,蒜瓣必須直立種植,且芽部朝上根部朝下。該播種方法有利于大蒜的生長發育,達到提高大蒜品質和增產的目的。
而目前的全自動大蒜栽種技術采用特定機件扶正蒜瓣、振動抖槽定向器等裝置,基本上解決了大蒜朝向問題[3]。但是由于大蒜在入土階段,靠其自身重力從出口落到開好的溝槽中,由于土壤等因素,會使蒜瓣在跌落土中后再次歪倒。
本裝置是為解決已經定向的蒜瓣在投穴過程中,直立度由于受土壤類型、土壤含水率、土穴形狀、導種管下口與土穴的距離等因素的影響,而在跌落土中后再次歪倒的問題而設計。
2 主要結構
本設計包括推送裝置,夾持裝置以及感應裝置。
推送裝置主要用來推動機械管夾,使其可以上下移動,方便將夾住的蒜瓣放入已打好的洞中,推送裝置主要是以發電機帶動齒輪轉動,使得其可以上下移動。
夾持裝置主要用來夾通過定向器傳送下來的蒜瓣,管夾采用耐磨、耐腐蝕金屬,內置有優質海綿,以防止對蒜瓣造成傷害,管夾內壁裝有感應裝置,當感應到蒜瓣時,管夾會自動夾緊,然后由推送裝置推動管夾,將蒜瓣放入洞中。
感應裝置分為兩個,第一個就是上面所述裝在管夾內壁,用來感應蒜瓣;第二個則是裝在管夾底端,在管夾伸入洞中的過程中,這個感應裝置會感應其深度,到達底部通過感應裝置使管夾松開,推動裝置帶動管夾上移,回到最初位置。
裝置結構如下圖:
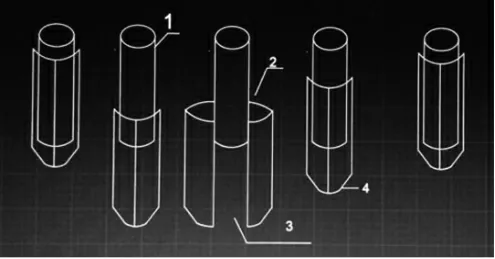
圖1 自動扶正夾管結構示意圖
3 工作原理
(1)本裝置是安裝在現有裝置(圖2)的下種管種子出口處的一個可以上下伸縮的管夾(管夾結構見圖1),當已處于正向的蒜瓣經過出口時,會被本裝置夾住(內置有優質海綿,不會對蒜瓣造成損傷),隨后管夾向下移動,直至將蒜瓣送至與土壤接觸時,管夾松開,上升至原位,等待接送下一個蒜瓣。(即一個在排種口與地面間的接送裝置,利用該裝置將蒜瓣放在土穴里,而不是蒜瓣自己跌落到土穴里,這樣就減少了蒜瓣在最后入土階段方向的不確定性)。
(2)下面部件側面為齒狀,當檢測到大蒜已經落到土壤中便會及時回收,在齒的縫隙中先漏進一部分土壤埋在大蒜底部,隨著機構回縮,土壤依次從下到上覆土,確保大蒜直立在土壤中。
(3)該裝置會根據具體情況而上下移動。
(4)與現有裝置結合:本裝置安裝在圖2 的4 處。以拖拉機作為動力,通過把手和牽引桿把動力傳到播種盤上;播種盤轉動,播種盤上的壓穴錐壓出圓錐形的種穴,同時凸輪轉動,帶動擋板向右移動,排種管和下種管連通, 蒜種由播種箱落下,經過排種管,落到下種管中,被管夾裝置夾住,之后管夾會被拖拉機的運動而帶動進行上下移動,當夾子下落到與穴底土壤接觸的時候松開將蒜瓣放在穴內,隨后管夾上升。播種盤繼續帶動凸輪轉動,擋板在凸輪推程過程中向左移動,阻斷播種管和下種管的連接;同時覆土板對落下的蒜種進行覆土,此為一次播種過程;管夾繼續在動力帶動下上下移動進行下一次播種,實現播種的連續作業,如此往復。
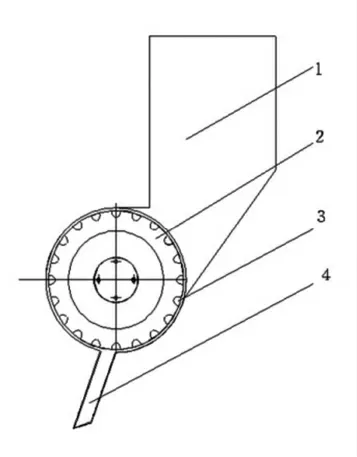
圖2
4 存在問題及解決方案
由于該裝置是直接與土壤接觸的,管夾在上下移動過程中,有部分土壤會卡到伸縮部位的縫隙中,從而造成磨損和卡滯。對此提出兩種解決方法:
一是在伸縮部位側面加上毛刷裝置,刷掉所附著的土壤;
二是故意增大伸縮接合部位的徑向縫隙,使得卡在縫隙中的土壤由于管夾的震動和土壤的自重而掉落,此外,大縫隙也有減小由于熱脹冷縮等原因所造成的擠壓與摩擦。
5 創新點及應用
在已成型的定向種植機存在一個入土時大蒜瓣芽尖朝向又會變化的問題,本裝置是安裝在已有機器的蒜瓣下種管出口處的機械管夾,直接把蒜送入土中。該裝置會根據具體情況而上下移動。
下面部件側面為齒狀,當檢測到大蒜已經落到土壤中時及時回收,在齒的縫隙中先漏進一部分土壤埋在大蒜底部,隨著機構回縮,土壤依次從下到上覆土,確保大蒜直立在土壤中。
解決了一些小型、實用型大蒜定向播種機在投穴過程中蒜瓣芽尖朝向的隨機性問題,提高定向大蒜播種機的精度。
6 結語
該裝置的研究,解決了已經扶正定向的蒜瓣在入土過程中,受重力、土壤等因素的影響,使得蒜瓣再次傾斜的問題。使蒜瓣定向種植機械定向效率更高,為大蒜種植機械體系的完善提供了參考。