一種無線控制的大型LED燈光陣列裝置設計
2020-06-22 14:21:40朱云龍韓賢會李悅光梁雄杰
機械工程與自動化 2020年3期
關鍵詞:設計
朱云龍,韓賢會,李悅光,梁雄杰,陳 敏
(1.合肥探奧自動化有限公司 智能信息化部,安徽 合肥 230027;2.中建鋼構有限公司 技術部,廣東 深圳 518000)
0 引言
LED燈光陣列通過上下運動的發光小球和變幻多彩的燈光演示各種平面或立體造型,集成了伺服電機控制、燈光控制、圖形像素、視覺藝術等多類學科技術,是一種新穎的高科技動態雕塑。2015年,阿聯酋阿布扎比展出過一套由1 000個LED燈組成的燈光陣列,取名為“Kinetic Fly”,該裝置由發光小球、線纜、電機模組等組成。發光小球為直徑約120 mm的RGB LED燈;線纜由燈的電源線和RGB三根信號控制線合并繞制而成,單根線纜直徑超過5 mm,用于拉動燈上下運動及控制燈顏色變化。電機模組采用步進電機,用于帶動轉盤卷揚鋼絲繩上下運動,線速度約0 m/s~0.5 m/s,行程約3 m~6 m[1]。該燈光陣列裝置的線纜較為粗大,速度受限,如果在明亮環境中,大規模發光小球上密集粗大的線纜會嚴重影響視覺效果;如果小球需要大行程運動,也會造成線纜的轉盤過大,對電機的扭矩和建筑的承重都會造成很大的負擔。
本文基于柳州科技館大型動態雕塑《天韻》的研發設計,該裝置吊掛于館內層高超過25 m的中央大廳中,包括217個LED發光小球組成的燈光陣列和18個圓環形LED屏組成的屏陣列,小球最大行程約10 m,圓環形LED屏最大行程約4 m。該裝置運行在空曠明亮的大廳中,且小球運動行程較大,已有的燈光陣列技術不適用于本場合。為此,本文設計了一種燈光陣列裝置,該裝置克服了現有技術的缺點,為燈光陣列的擴展應用奠定了堅實的基礎。
1 裝置總體設計
裝置主要由鋼架平臺1、小球電機模組2、LED屏電機模組3、圓環形LED屏4、鋼絲繩5、LED發光小球6、吊裝組件7等組成,整體結構如圖1所示。
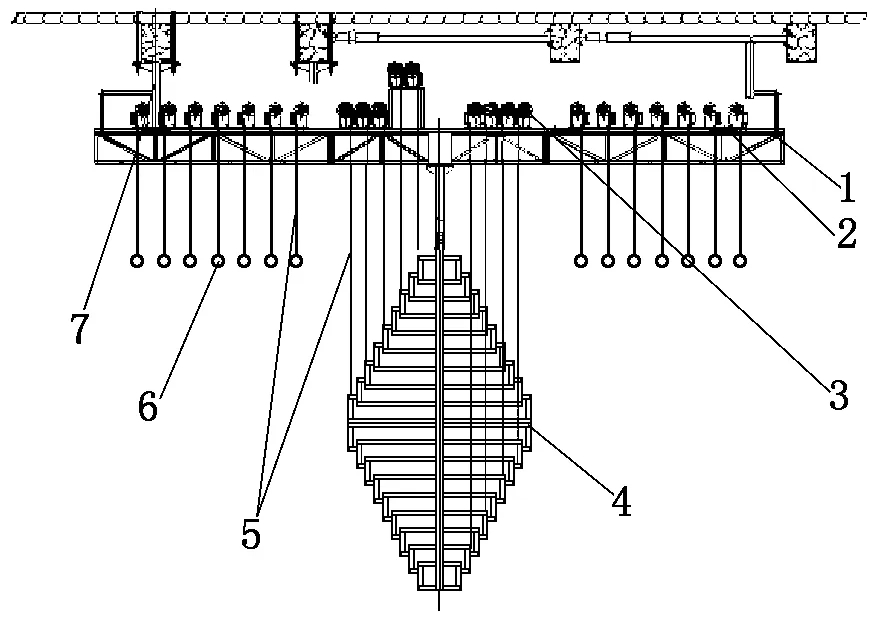
1-鋼架平臺;2-小球電機模組;3-LED屏電機模組;4-圓環形LED屏;5-鋼絲繩;6-LED發光小球;7-吊裝組件
吊裝組件固定于建筑承重梁,用于安裝固定鋼架平臺,鋼架平臺用于安裝固定小球電機模組和LED屏電機模組。每個電機模組卷揚一根鋼絲繩上下運動,末端固定發光小球或LED屏,其中每個發光小球由一根鋼絲繩固定,每個LED屏由三根鋼絲繩固定。發光小球均勻排列成7層圓環,相鄰兩層圓環中心間距為370 mm,總共217個。LED屏呈圓環狀,環高為360 mm,共有9種不同直徑規格,最大直徑為2 521 mm,最小直徑為687.5 mm,共18個LED屏。本文主要圍繞LED燈光陣列的設計進行闡述。
2 小球電機模組設計
小球電機模組由電機1、模組支架2、發光小球3、燈板組件4(含LED燈板及無線控制子節點)、鋼絲繩5和轉盤6等組成,單個小球直徑為150 mm,行程最大為10 m。小球電機模組結構如圖2所示。
2.1 電機選型
小球總質量m=0.5 kg,轉盤半徑r=0.06 m,轉盤材質為硬鋁,厚度為15 mm。小球運行最大速度按照v=6 m/s計算,最大加速度a=10 m/s2,加速時間t=0.6 s,轉盤最大角加速度α約166.67 rad/s2。經計算,運動過程中,小球所需最大扭矩T球約0.6 N·m,轉盤所需最大扭矩T盤約0.2 N·m,總扭矩T最大約0.8 N·m,考慮摩擦損失及使用余量,效率系數取0.7,電機理論扭矩T額>1.14 N·m。
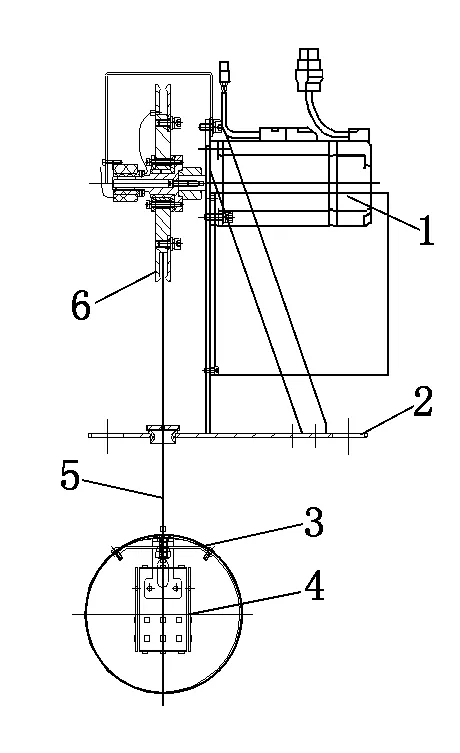
1-電機;2-模組支架;3-發光小球;4-燈板組件;5-鋼絲繩;6-轉盤
電機選用臺達C10804S7交流伺服電機,額定電壓為220 V,額定轉速為3 000 r/min,額定扭矩為1.27 N·m,最大扭矩為3.82 N·m。驅動器選用臺達A2-0421-E交流伺服驅動器,采用全閉環控制,具有速度控制模式、位置控制模式、扭矩控制模式,速度響應帶寬為1 kHz,支持DI擴展接口和EtherCAT總線。
2.2 鋼絲繩設計
本文采用燈光的供電與變色控制相分離的技術方案,需要鋼絲繩既能提升小球上下運動,又能給小球內LED燈及ZigBee子節點控制板供電。鋼絲繩選擇銅絲作為正極,外覆鋼絲作為負極,銅絲與外覆鋼絲中間選用絕緣材料隔離繞制為一根特制鋼絲繩。
小球內設計24顆RGB LED燈珠,單顆燈珠最大功率為0.5 W,ZigBee子節點功率小于1 W,供電采用24 V直流電,所需供電電流小于0.5 A。根據供電需求,選用直徑0.3 mm的銅絲作為正極,允許通電電流大于0.5 A,最終線纜總體直徑控制在1.5 mm,直徑大小只有現有產品線纜直徑的30%,性能獲得極大的提升。
2.3 燈光變色控制
ZigBee技術具有功耗低、組網簡單、成本低的特點,ZigBee支持星型、樹型和網狀拓撲結構,可以支持數以百計的節點,廣泛應用于自動控制領域[2]。文獻[3]中對ZigBee進行高密度節點通信測試,實現了單個主節點與100個子節點的通信,且在沒有校驗和糾錯的條件下,誤碼率低于0.02%。文獻[4]中對基于ZigBee技術的LED燈光控制方案做了詳細設計。
本文發光小球的變色控制采用基于ZigBee技術的無線控制方案。ZigBee通信模塊選用了TI公司的CC2530F256芯片,該芯片是用于2.4 GHz IEEE 802.15.4/RF4CE/ZigBee的第二代片上系統解決方案。CC2530使用增強型8051CPU,結合了領先的RF收發器的優良性能。芯片具有5個各自可編程的計數器/捕獲通道,每個都有一個16位比較值。每個計數器/捕獲通道可以用作一個PWM輸出或捕獲輸入信號邊沿的時序[5]。LED燈板集成了專用LED驅動電路,通過PWM實現R、G、B三個輸出端口的256級調節控制。燈光變色控制架構如圖3所示。
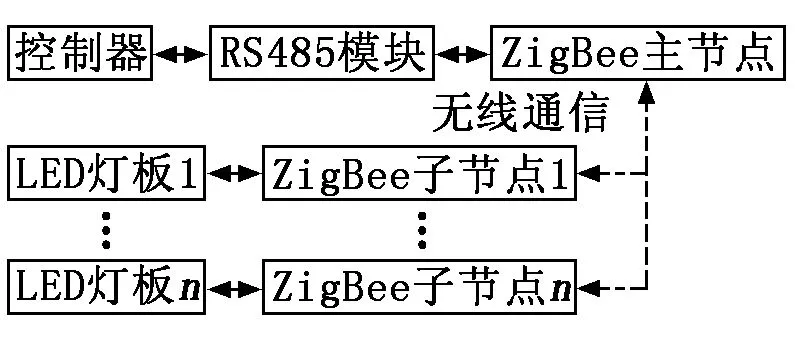
圖3 燈光變色控制架構
LED燈板和ZigBee子節點放置在發光小球內部,由鋼絲繩供電,LED燈能夠實現RGB 256級顯示,ZigBee子節點接收ZigBee主節點控制信號后,實時控制LED燈變色。
2.4 模組測試
根據以上設計,筆者搭建了實驗臺,開展了運行測試,電機模組位于離地約13 m高度,鋼絲繩長度約12 m,如圖4所示。經過30天,每天不少于12 h的運行試驗,驗證了鋼絲繩的良好力學性能,在保證正常供電的同時,能夠長時間纏繞不損壞。小球最大運行速度達4 m/s時,燈光變色控制仍然比較穩定可靠。經過測試,充分證明了本文技術方案的可行性。

圖4 電機模組實驗臺
3 控制網絡結構設計
由于裝置電機數量較多,電機位置實時動態變化,數據量較大,故采用了工業自動化當前最新的現場總線控制技術——EtherCAT(以太網控制自動化技術)。EtherCAT幾乎支持任何拓撲類型,包括線型、樹型、星型等,1 000個I/O的更新時間只需30 μs,其中還包括I/O周期時間,單個以太網幀最多可進行1 486字節的過程數據交換,幾乎相當于12 000個數字輸入和輸出,而傳送這些數據耗時僅為300 μs[6]。控制網絡結構如圖5所示。
燈光陣列的控制器選用了2個倍福C6930工業PC,每個控制器通過EtherCAT總線連接112臺或105臺伺服驅動器,以實現217個伺服驅動器的組網連接。控制器與ZigBee主節點之間通過RS485模塊連接,ZigBee主節點與子節點之間通過無線傳輸信號,針對217個子節點,采用3個主節點各連接56個子節點、1個主節點連接49個子節點的方案。
4 結語
本文通過特制鋼絲繩、ZigBee無線技術、EtherCAT總線技術設計了一種無線控制的大型LED燈光陣列裝置,相比現有產品,本文的設計極大地降低了線纜直徑,增加了小球的運動行程范圍,使裝置可以在科技館、博物館、商場大廳、酒店等各類明亮高空環境下良好地運行,大大擴展了裝置的應用范圍。
設計過程中發現,大規模燈光在高于1 Hz的變色頻率下同時進行顏色突變時,會出現少量小球變色滯后的情況,在今后的研究中,還需要對其進一步改進,以達到更好的展示效果。

圖5 控制網絡結構
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
