隧道巡檢機器人通信系統設計
2020-06-22 13:23:17閆詩玥郭陽寬
數字技術與應用 2020年4期
關鍵詞:網絡通信
閆詩玥 郭陽寬

摘要:針對隧道巡檢機器人巡檢過程中環境密閉、強磁干擾、長距離傳輸、信號延遲、通信不穩定等問題設計了隧道巡檢機器人通信系統,分別從網絡通信及內部通信兩方面設計了基于Labview的軟件控制的網橋通信、以太網絡通信與串口通信結合的隧道巡檢機器人通信系統。有效解決了隧道巡檢環境干擾問題,使通信更加快速,信號更加穩定,保障了隧道巡檢機器人巡檢過程信息交互的穩定與可靠。
關鍵詞:隧道巡檢機器人;通信系統;網絡通信
中圖分類號:TP242? ? ?文獻標識碼:A? ? 文章編號:1007-9416(2020)04-0000-00
0 引言
隨著經濟的發展,電纜發生故障引發的事故的幾率也在相應地增加,為了保障電力電纜在地下隧道內的穩定安全運行,隧道巡檢機器人孕育而生[2]。隧道巡檢機器人具有可長時間不間斷工作,保證了巡檢過程中的實時可靠性,復雜環境中適用性等。隧道巡檢機器人在進行巡檢時需要與外界搭建可靠的通信,由于隧道區域空間狹小,存在拐角和岔口,加上內部有大量的電力電纜,構成了一種閉域空間環境,這些都將給隧道巡檢機器人的通信帶來嚴重困難,因此有必要對隧道巡檢機器人的通信系統進行設計[1]。
1 通信系統整體設計
通信系統分為網絡通信和內部通信,其中網絡通信為了避免因直角彎產生的信號延遲等問題,主要由兩個部分組成分別為有線、無線傳輸[3]。有線傳輸部分與信號中繼相連接,被放入井下的隧道巡檢機器人攜帶中繼模塊。其中中繼模塊通過網橋無線發射和接受相應指令;內部通信即本體攜帶的控制單元與驅動器、傳感器等裝置的信號通信。
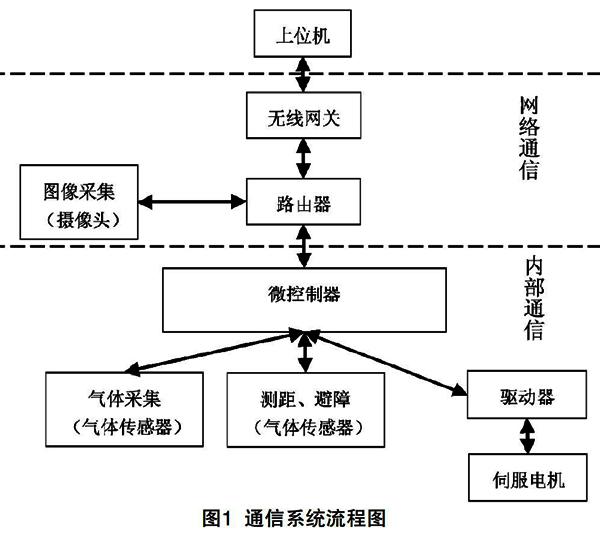
由于隧道巡檢系統的硬件結構可分為三層:上層-上位機、中層-微控制器、下層-用于執行的驅動單元和用于反饋的采集單元。因此隧道巡檢機器人的通信系統流程圖如圖1所示,上層上位機與中層微控制器通過網絡通信完成指令的傳輸及相應處理;中層微控制器與下層單元選用串口通信方式完成信息交互[4]。
2 網絡通信設計
通信系統中運用網絡通信傳輸者著上層上位機和中層微控制器之間的指令,同時負責與機器人所攜帶的攝像頭之間的畫面反饋工作。因為隧道空間密閉同時存在強磁干擾,所以需要傳輸距離較長并且穩定的信號傳輸,為穩定完成通信任務,實現較長距離信號傳輸,為實現對機器人動作位置調整和實時監控等功能,設計了以網橋為中繼的網絡通信模式[6]。
網橋可以在較長的距離上正常工作,其主要在數據鏈路層工作,連接LAN的方法是不同的MAC地址發送幀[5]。由于考慮到在網絡通信的過程中會有障礙物出現的可能,為降低對信號的影響將中繼單元(網橋)放置在隧道內,與上位機的連接由于不需要移動所以選用了有線傳輸更加穩定。傳輸網橋有2.4G和5.8G兩種型號傳輸方式,由于5.8G傳輸距離長、傳輸速率塊、傳輸穩定等優勢選用5.8G網橋進行信號傳輸。
上位機和微控制器及上位機和攝像頭之間為單獨通信,因為與上位機間的通信都需要通過雙絞線形式進行連接并且在于機器人內部,并且穩定性能要求高,所以選擇國電龍源電氣路由器搭建網絡,即能接入控制器進行指令傳輸,也能連接攝像頭增加控制靈活性。具體參數如表1所示。
3串口通信設計
中層的微控制器與下層的電機及三個驅動器之間的信號通信采用的是串口通信模式,因為RS232應用簡便、成本較低、通信質量穩定、應用領域廣泛等特點所以設計選用了RS232串口協議通信方式。
RS232串行接口主要用于完成中層微控制器與下層部分模塊之間的通信,選用的中層的微控制器與下層的驅動器上均有可以用于進行RS232通信的DB9串行接口。組網時應在發送線與地線之間連接一個10kΩ的電阻,為保障工作電路和驅動器的安全。通過對三個驅動器的組網方法就可以實現機器人各個電機之間的聯動控制,實現靈活操作控制。
4 結論
本文完成了基于Labview的軟件控制的5.8GHz的外部網橋通信、以太網絡通訊與RS232串口通信結合的隧道巡檢機器人巡檢系統的通信系統設計。此通信系統可以保證網絡傳輸的快速可靠,有效降低隧道內的強磁干擾。
參考文獻
[1] 姜蕓,付莊.一種小型電纜隧道檢測機器人設計[J].華東電力,2009,37(1):95-97.
[2]李忠友,劉元雪,陳小良,等.隧道火災研究現狀與展望[J].地下空間與工程學報,2010,06(a02):1755-1760.
[3] Noda S, Ueda K. Fire detection in tunnels using an image processing method[C].Vehicle Navigation and Information Systems Conference, 1994. Proceedings. IEEE,1994:57-62.
[4] 謝振宇.電纜隧道綜合檢測機器人控制系統研究[D].上海交通大學,2008.2
[5]趙亮,馮林,吳振宇,等.基于FPGA的小型機器人無線通信系統[J].計算機工程,2010,36(13):251-253.
[6] 李向東,厲秉強.基于巡檢機器人的通信控制系統設計與分析[J].山東電力技術,2005(6):3-7.
收稿日期:2020-03-10
作者簡介:閆詩玥(1995—),女,北京人,碩士研究生,研究方向:儀器儀表工程。
Design of Communication System for Tunnel Inspection Robot
YAN Shi-yue1, GUO Yang-kuan2
(1.GUODIAN LONGYUAN ELECTRICAL CO., LTD.,Beijing 100039;
2.Beijing Information Science and Technology University, School of Instrument Science and opto Electronics Engineering, Beijing 100192)
Abstract: Aiming at the problems such as environmental confinement, strong magnetic interference, long-distance transmission, signal delay, and unstable communication during the inspection process of the tunnel inspection robot, the tunnel inspection robot communication system was designed. From the aspects of network communication and internal communication, a bridge communication and a tunnel inspection robot communication system combining Ethernet communication and serial communication are designed. This design effectively solves the problem of environmental interference in tunnel inspection, makes communication faster, and signals are more stable, ensuring the stability and reliability of information interaction during the inspection process of the tunnel inspection robot.
Keywords:Tunnel Inspection Robot;Communication System;aspects of network communication
猜你喜歡
數字通信世界(2022年8期)2022-09-26 07:28:54
艦船科學技術(2022年6期)2022-04-19 11:02:04
電子制作(2019年15期)2019-08-27 01:11:48
測控技術(2018年7期)2018-12-09 08:57:54
電子測試(2018年14期)2018-09-26 06:05:06
電子制作(2018年10期)2018-08-04 03:24:46
通信電源技術(2018年3期)2018-06-26 06:33:46
電子制作(2018年1期)2018-04-04 01:48:30
電子制作(2017年17期)2017-12-18 06:41:06
電子測試(2017年23期)2017-04-04 05:07:12
