一種ADS-B空間信息采集系統的設計
2020-06-22 13:23:17吳小丹黃奕徐賀明張建軍宋衛
數字技術與應用 2020年4期
關鍵詞:數據采集
吳小丹 黃奕 徐賀明 張建軍 宋衛

摘要:本文對一種ADS-B空間信息采集系統進行了研究,闡述了該系統的工作原理,并對ADS-B全域空間信息在線系統的軟硬件架構進行了詳細論述。該系統通過軟件無線電(SDR)和異面構型天線解決了小型化多通道大容量接收的硬件難題,主要面向民航飛機ADS-B報文接收與應用領域。
關鍵詞:ADS-B;軟件無線電;數據采集
中圖分類號:TP311.1? ? ?文獻標識碼:A? ? 文章編號:1007-9416(2020)04-0000-00
0 引言
ADS-B的全稱是廣播式自動相關(Automatic Dependent Surveillance –Broadcast,ADS-B),是無線電技術在航空監視上的新應用,即基于GPS等導航衛星定位和空地、空空數據鏈的航空器運行監視系統。作為一種在空管監視領域被正式采用的新技術,與傳統的地面雷達系統相比,ADS-B系統能跳過傳統航空監視領域的應答步驟,提供更加實時和準確的航空器身份信息和三維位置信息,增加對偏遠地區如森林、遠海、沙漠的監視范圍,同時減少有雷達區域對雷達多重覆蓋的需求。ADS-B還可通過TIS-B和FIS-B應用程序提供交通和官方生成的圖形天氣、地形、空域限制等飛行信息,并向其它裝載了ADS-B設備的飛機提供本飛機的位置和速度方向等信息,提高機組的空域情景意識,增強飛機的安全性,并可用于航空公司的運行監控和管理,為高效、安全地飛行奠定基礎。因此,國際民航組織(International Civil Aviation Organization,ICAO)確定將其作為未來場面和空中監視系統的主流技術。
由于所有裝配ADS-B系統的飛機隨機、自動、周期性的廣播ADS-B信號,本文研究的ADS-B空間信息系統,旨在利用衛星平臺的高空優勢實現對飛機飛行狀態進行大范圍的、近實時的連續跟蹤與監視,尤其是對地面空管系統覆蓋的薄弱地區,如大洋、北極、沙漠和地面系統投資費用高的偏遠山區等空域進行全天候監視,大大提高飛機的飛行安全、飛行效率和空域利用率。
1 ADS-B空間信息采集系統的原理
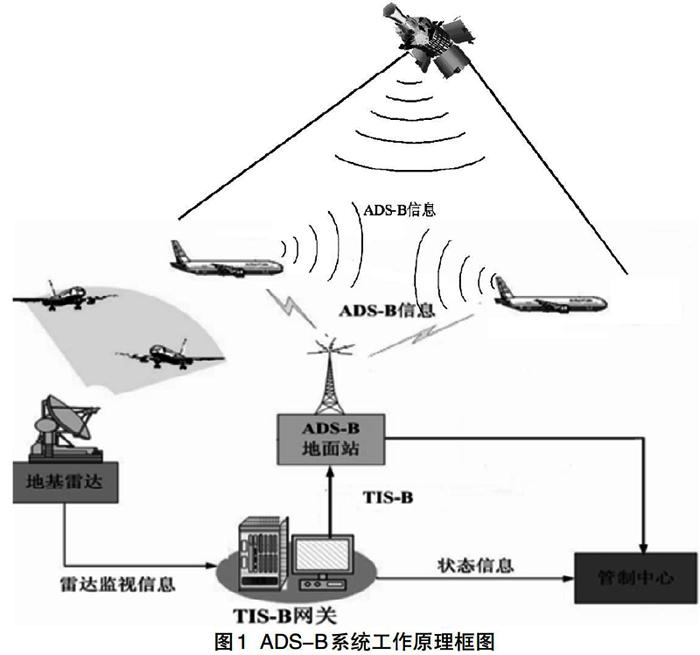
ADS-B的工作原理如圖1所示。首先機載ADS-B設備收集本機GNSS設備產生的定位信號(如GPS信號),對飛機進行實時定位,然后綜合機身上搭載的慣性陀螺儀、高度計等設備產生的飛行相關信息,把本機身份、位置、高度、速度、航跡(爬升率、飛行方向)等數據組裝后以一定的時間間隔向外廣播,這樣飛機和地面基站可同時看到空域內其它飛機的方位與狀態,更好的對航線內飛機的間隔和密度進行規劃,從而有效提高機組的空中交通情景意識,使飛行任務更加安全與高效。
由于傳統的地基ADS-B系統通信時未規定通信協議,屬于突發通信系統,所有的機載ADS-B設備都采用同頻廣播的方式隨機發送ADS-B消息,因此,存在2個或多個ADS-B消息沖突的現象。當從衛星平臺上接收飛機ADS-B信號時,由于視場遠大于機載ADS-B的通信距離,飛機數量更多,視場內的飛機在同一時刻廣播ADS-B,或者不同時刻廣播的ADS-B消息因為傳播時延不同而同時到達星載ADS-B接收機,因而ADS-B消息產生碰撞的概率會更高[1]。ADS-B信號沖突產生的原理如圖2所示。
1090ES體制并未采用任何通信協議,所有機載ADS-B OUT設備都是隨機發射PPM調制信號,傳統的ADS-B基站主要依靠接收各信號的幅度差來進行碰撞信號的分離,因此,重點是要對到達天線接收端的信號功率進行精確估計。而在衛星上對地面的ADS-B進行接收時,由于接收范圍擴大,無疑會放大衛星視場內信號碰撞的概率。因此,需要通過使用多個天線波束對視場內的空域進行分割,人工制造“小區”,使得各小區的信號功率差滿足信號解算要求,達到對碰撞信號分離解算的目的。
2 ADS-B空間信息采集系統的設計與實現
2.1 系統組成及原理
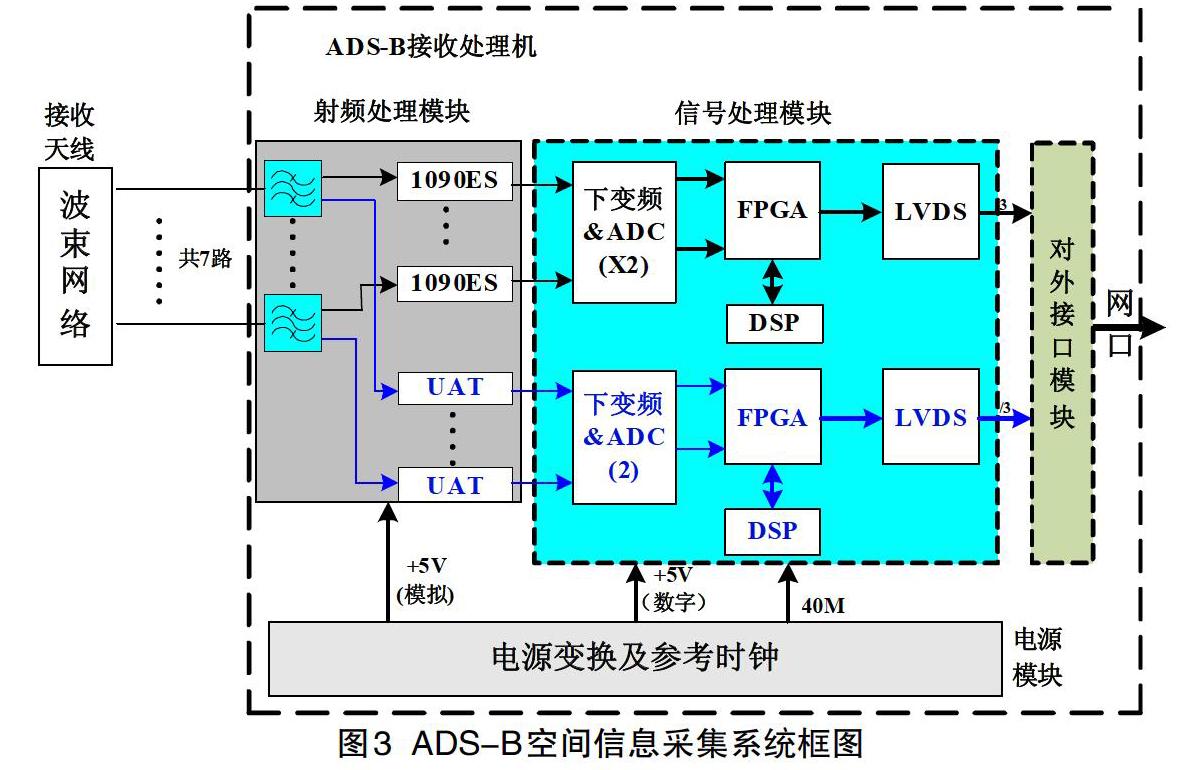
ADS-B空間信息采集系統由ADS-B信號接收天線和ADS-B信號接收處理機組成,如圖3所示。ADS-B信號接收天線為六棱臺錐天線,共有7個天線單元,將接收到的L波段信號經過濾波放大后進行頻點分離,形成UAT、1090ES各7路,共14路ADS-B射頻信號送給接收機。ADS-B信號接收處理機由3個模塊組成,分別是射頻處理前端、信號處理模塊和電源變換及參考時鐘。
系統的工作原理如下:
1個多通道ADS-B天線接收覆蓋范圍內的ADS-B信號,形成7路ADS-B射頻信號送給接收機; 接收處理機接收天線送來的7路ADS-B射頻信號,并對其進行功分成14路信號,進行混頻、采樣、信號檢測、噪聲剔除、解信號沖突、解調、解碼等處理,獲取ADS-B的原始數據信息與解算信息;接收處理機通過總線通訊,傳輸遙測信息,同時可以進行太網高速總線通訊,實現解算數據的實時高速傳輸。
2.2 系統的硬件設計與實現
2.2.1接收天線
由于ADS-B信號帶寬較寬,因此,接收靈敏度較低,對天線增益提出了較高的要求。同時,為了盡可能地發揮單個載荷的接收效能,需要在保證天線增益的情況下盡可能地擴大天線的波束角。經過仿真分析,結合衛星平臺的約束條件,采用7個螺旋天線組成陣列天線,每個螺旋天線具有一定的安裝指向,使得7個波束實現對空域±64°的的覆蓋。天線的結構外形如圖4所示。
六棱錐臺結構以鋁合金板材為原材料,其中隔板采取鏤空設計以實現減重效果,鏤空圓孔的尺寸遠小于天線工作波長,對電性能無影響。
為了固定螺旋天線的螺距,以保證天線電性能,傳統的螺旋天線一般將柔軟的金屬線纏繞在刻有螺旋線走向的全高支撐柱上,或者直接對彈性很差而剛度很強的金屬線材料做定型處理,并依附于支撐柱上。
所設計的螺旋天線單元本身全高約350mm,為了適應小型化需求,必須壓縮天線的高度。采取了對天線進行壓緊釋放的處理,避免使用全高支撐柱,然而加工工藝無法保證彈性螺旋線(鈹青銅材料)經過熱處理定型并且脫離模具后的螺距以及剛度。采用了張緊繩并行分段固接的形式,如圖5所示。
為了滿足接收天線的電性能需求,螺旋天線的螺距設計值應為65mm,但是為了保證天線本身的剛度,縮短沖擊力矩,防止天線釋放后造成螺線長時間抖動的問題,在結構設計中,將螺旋天線自然狀態下的螺距設計為85mm,并采用三根均勻排布的張緊繩依次壓緊綁定,實現螺旋天線的非完全釋放。采用這種螺距設計的方式還可以精確控制螺距,極大補償螺距不準造成的電性能的下降。
ADS-B天線的7副單元天線各指向不同方向,最終設計在每副天線的底部安裝高度100mm(全高為350mm)的介質導向環以引導螺旋線的展開釋放方向。壓縮狀態的ADS-B天線尺寸較展開狀態的空間壓縮比例達到77%。整個錐臺結構采用中空設計,方便將后端的接收機和低噪放置于錐臺內部,縮小系統整體包絡。
2.2.2接收處理機
在ADS-B空間信息采集系統中,接收機內部各模塊的原理連接如圖6所示。
由圖可知, ADS-B接收處理機由射頻前端、信號處理器和二次電源組成。
射頻前端功能是接收ADS-B合成網絡輸出的七通道L波段射頻信號,經濾波放大,頻率分離后輸出共計十四路信號給信號處理器,并可根據指令要求分別調整各個輸入通道的信號功率。
信號處理器采用FPGA+DSP的SDR架構,通過配置在外圍的接口電路和存儲芯片,以及接收前端的基于軟件無線電的通用數字化射頻前端,可以靈活的根據任務需求在線進行軟件模塊的載入和更新。信號處理器首先經ADC芯片接收包含的路信號,分別進行采樣、濾波、放大、下變頻等處理,輸出零中頻信號給FPGA芯片進行解時隙沖突、解調、打時標、組幀、信息提取等處理,精簡信息通過CAN總線接口發送至綜合電子分系統,普通信息通過網絡接口輸出至數據服務器[2]。
2.3 系統的軟件算法
ADS-B空間信息采集系統采用七個獨立通道進行數據的獨立獲取,在兼顧運算量和平臺資源情況下,采用了基于極大似然相關解調方式的信號提取與解算算法[3]。
2.3.1報頭框架初始檢測算法
通過檢測4個連續的模式S報頭時間間隔的脈沖,開始進行脈沖報頭的初始檢測。檢測的標準是:(1)4個脈沖報頭和數據塊第一個脈沖遵循0?s,1?s,3.5?s,4.5?s的時序關系;(2)4個報頭脈沖里上升沿個數≥2;(3)其余為有效脈沖位置(VPP);(4)由于設備內外部噪聲等干擾的影響,為了防止脈沖位置偏移,采樣容差可以+1(即后延一個樣點)或-1(前推一個樣點)。
2.3.2碰撞情況判斷及解交織算法
碰撞情況判斷:通過報頭框架檢測算法,在120us內檢測到多個報頭,則判斷出現碰撞狀況。
重構法:對于兩重信號碰撞的情況,如果碰撞在一起的兩個ADS-B信號功率值相差較大,則可以先提取較大功率的信號并進行噪聲重構,再與碰撞在一起的原消息進行比較,剔除后得到功率較小的報文。
2.3.3比特位及置信度的判定
通過采用基線多樣點技術利用每個模式S比特位(chip)的10個樣點值來對0/1及置信度進行判定,算法流程如圖7所示。利用AD采樣出來的每個比特位的10個樣點判斷該比特位是1還是0;而置信度則是對比特位可能落入的0/1區域可能性大小的一種度量,置信度將會被用于后續的糾錯模塊。
3 應用領域與意義
ADS-B空間信息采集系統利用異面構型天線技術、綜合數字化前端、新一代高速基帶處理系統等技術,在降低系統重量和成本的同時,兼容世界主流的1090ES和UAT兩種ADS-B信號制式,提高信號的接收范圍和處理效率,可以全天時全天候采集全球民航、通航飛機發射的ADS-B信號,進行實時處理后在地面站應用端將空域內飛機的飛行狀態實時顯示出來。主要用于飛機航線安全監控及空管指揮,包括:繪制長期的空中態勢圖,幫助進行飛機航線規劃,以低成本高性能的優勢填補偏遠地區、遠海等缺乏傳統空管雷達覆蓋的區域,在中小機場替代空管雷達進行空域管理指揮,提高空難救援效率等。
4 結語
本文介紹了一種ADS-B空間信息采集系統的設計,該系統利用SDR(軟件無線電技術)平臺及異面天線構型技術,兼容1090ES和UAT兩種ADS-B制式信號,同時解決了在設備小型化的同時,保留高性能數據處理能力的難題。
參考文獻
[1] 吳小丹.一種全域數據采集與交換載荷技術的研究[J].空間電子技術,2018.
[2]趙民建.多波段、多速率、多模式軟件無線電接收技術研究[D].杭州:浙江大學,2003年.
[3]吳駿.星載高靈敏度ADS-B接收機信號解算算法和研究[D].成都:電子科技大學,2016年.
收稿日期:2020-03-09
作者簡介:吳小丹(1984—),男,貴州六盤水人,通信工程碩士,工程師,研究方向:數據收集載荷的融合技術,航空監視技術等。
The Design of ADS-B Space Data Collect System
WU Xiao-dan,HUANG Yi,XU He-ming,ZHANG Jian-jun,SONG Wei
(Shanghai Aerospace Electronic Technology Institute, Zhongchun Rd 1777, Shanghai? 201109)
Abstract:This paper illuminates the working principle of an ADS-B space data collect system, and expounds the system design and its soft-hardware structure. The system resolves the hardware problems of miniaturization of multi-channel and large-capacity reception by applying software radio technology and different-planes-structure antenna, and is mainly oriented to the field of ADS-B message reception and application of civil aviation aircraft.
Key words: ADS-B;software radio;data acquisition
猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15
電子技術與軟件工程(2016年22期)2016-12-26 11:11:30
現代電子技術(2016年22期)2016-12-26 09:44:35
電子技術與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識與技術(2016年27期)2016-12-15 20:42:01
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
