變結(jié)構(gòu)航天器模糊神經(jīng)網(wǎng)絡(luò)滑模控制器設(shè)計(jì)
2020-06-23 07:58:04王冉周志成曲廣吉陳余軍
中國空間科學(xué)技術(shù) 2020年3期
關(guān)鍵詞:結(jié)構(gòu)
王冉,周志成,曲廣吉,陳余軍
1. 中國空間技術(shù)研究院 通信衛(wèi)星事業(yè)部, 北京 100094 2. 中國空間技術(shù)研究院, 北京 100094
隨著航天技術(shù)的發(fā)展,出現(xiàn)了具有變結(jié)構(gòu)特性的航天器,例如帶有大型可展開天線的遙感、通信衛(wèi)星以及在軌組裝的航天器等。這類航天器在軌展開后結(jié)構(gòu)尺度可達(dá)幾十米甚至上百米,展開過程中航天器的質(zhì)量分布和剛度特性將發(fā)生明顯變化。如果按照單一在軌構(gòu)型及其動(dòng)力學(xué)特性進(jìn)行姿態(tài)控制系統(tǒng)設(shè)計(jì),有可能使航天器姿態(tài)產(chǎn)生較大偏差甚至失穩(wěn),因此研究適用于變結(jié)構(gòu)過程的姿態(tài)控制方法具有重要的工程價(jià)值。
近些年滑模變結(jié)構(gòu)控制器有了較快發(fā)展,相對(duì)于PID控制器具有更強(qiáng)的魯棒性,可用于復(fù)雜航天器的姿態(tài)控制[1-2],但存在設(shè)計(jì)復(fù)雜、計(jì)算量大、抖振等問題。在滑模控制中,具有PID形式的滑模面和傳統(tǒng)滑模面相比具有更快的響應(yīng)速度和更高的穩(wěn)態(tài)精度[3],將其與群智能算法[4]、反步法[5]、狀態(tài)觀測(cè)器[6]以及神經(jīng)網(wǎng)絡(luò)[7]等結(jié)合起來,可進(jìn)一步提高其控制性能。模糊神經(jīng)網(wǎng)絡(luò)具有邏輯推理和自學(xué)習(xí)能力[8],將滑模控制與其結(jié)合可以實(shí)現(xiàn)自適應(yīng)滑模控制,并降低抖振[9]。將模糊神經(jīng)網(wǎng)絡(luò)與滑模控制器相結(jié)合,可用于帶有柔性附件的航天器[10]、機(jī)器人[11]、陀螺儀[12],電機(jī)[13]等的控制,但是以上研究對(duì)象的模型參數(shù)未發(fā)生明顯改變。對(duì)帶有大天線的航天器進(jìn)行動(dòng)力學(xué)建模面臨新的問題[14],對(duì)大天線展開過程整星的動(dòng)力學(xué)建模可采用多體動(dòng)力學(xué)方法[15]、絕對(duì)節(jié)點(diǎn)坐標(biāo)法[16]等,但是存在模型數(shù)據(jù)量大,難以進(jìn)行控制仿真等工程問題,實(shí)際應(yīng)用中需要采用工程可用的動(dòng)力學(xué)建模方法。
本文以帶有可展開天線的航天器天線在軌展開過程為研究對(duì)象,在考慮大天線展開的剛?cè)狁詈蟿?dòng)力學(xué)模型基礎(chǔ)上,利用RBF神經(jīng)網(wǎng)絡(luò)逼近變結(jié)構(gòu)航天器的動(dòng)力學(xué)模型。由于傳統(tǒng)的PID控制器和滑模控制器難以滿足天線展開期間航天器姿態(tài)控制的要求,為進(jìn)一步提高姿態(tài)控制器的魯棒性,設(shè)計(jì)模糊神經(jīng)網(wǎng)絡(luò)自適應(yīng)調(diào)節(jié)滑模控制的參數(shù)。其中,滑模控制具有PID滑模面,在變結(jié)構(gòu)過程結(jié)束后由滑模控制直接切換為PID控制器以減小抖振的影響。模糊神經(jīng)網(wǎng)絡(luò)自適應(yīng)滑模控制器相較于傳統(tǒng)滑模控制器具有更強(qiáng)的魯棒性和更快的響應(yīng)速度,可以提高航天器變結(jié)構(gòu)期間的穩(wěn)定性和控制精度。
1 帶有柔性附件的變結(jié)構(gòu)航天器動(dòng)力學(xué)建模
航天器有兩個(gè)柔性太陽翼和一個(gè)大型可展開天線,天線展開時(shí)航天器質(zhì)量不變而構(gòu)型發(fā)生改變,整星的慣量參數(shù)和耦合系數(shù)均發(fā)生改變,利用混合坐標(biāo)法進(jìn)行模化,在此模型的基礎(chǔ)上利用拉格朗日方法及其偽坐標(biāo)形式可以得到柔性耦合動(dòng)力學(xué)方程[17-18]。
動(dòng)力學(xué)模型示意如圖1所示。其中,OI-xIyIzI為慣性系,Ob-xbybzb為星本體系,Oa-xayaza、Osl-xslyslzsl和Osr-xsrysrzsr分別為天線和左右太陽翼的附件坐標(biāo)系。
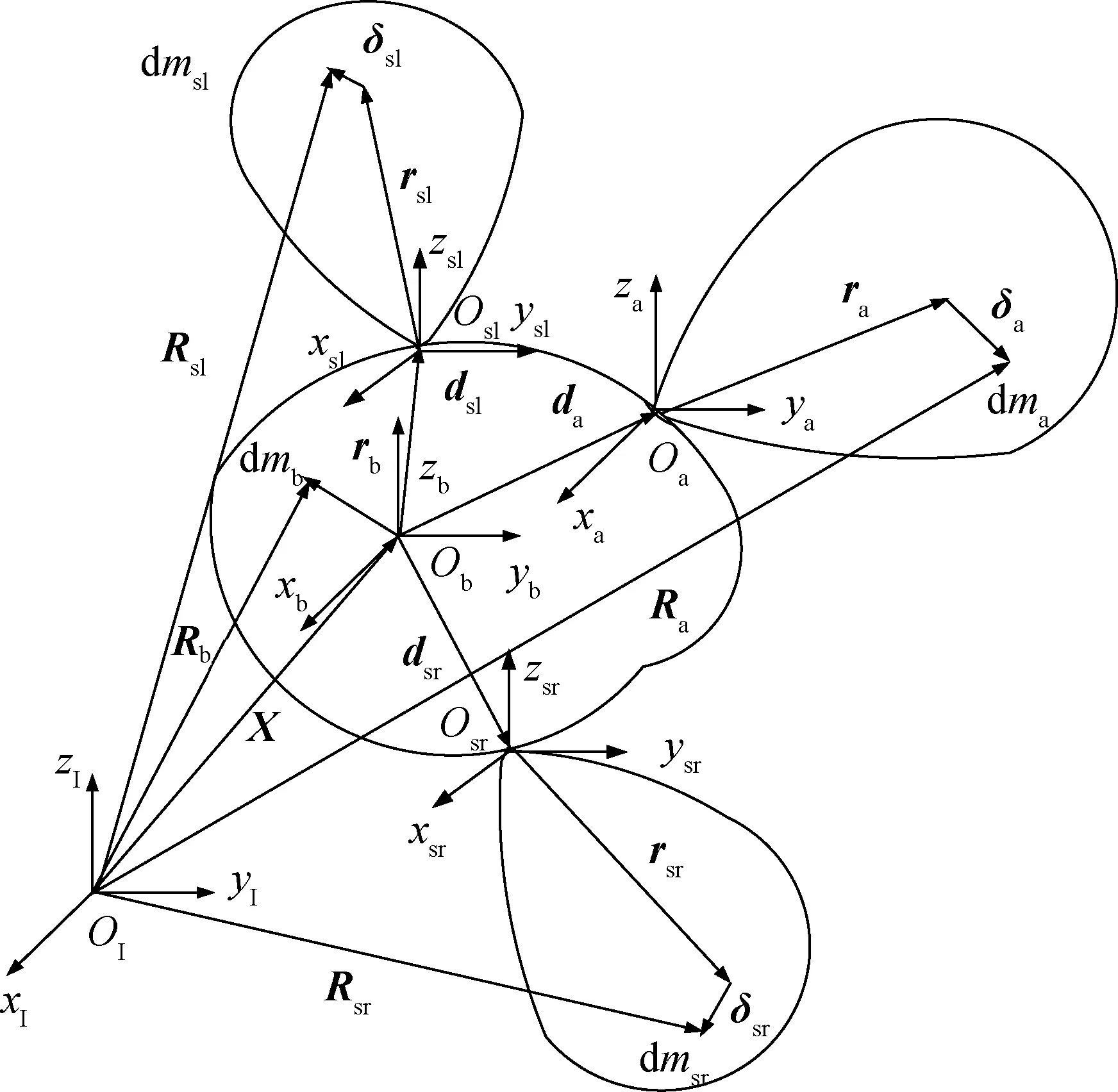
圖1 動(dòng)力學(xué)模型示意Fig.1 Dynamical model
星本體質(zhì)點(diǎn)位置矢量:
Rb=X+rb
式中:X為航天器質(zhì)心相對(duì)于慣性系位置矢量,在慣性系中度量;rb為星本體任意一點(diǎn)dmb相對(duì)于質(zhì)心的位置矢量,在星本體系中度量。
天線質(zhì)點(diǎn)位置矢量:
Ra=X+da+ra+δa
式中:da為天線與星本體連接點(diǎn)相對(duì)于航天器質(zhì)心的位置矢量,在星本體系中度量;ra為天線任意一點(diǎn)dma相對(duì)連接點(diǎn)的位置矢量;δa為變形位移,在天線坐標(biāo)系中度量。
太陽翼質(zhì)點(diǎn)位置矢量為:
Rsi=X+dsi+rsi+δsi
式中:i=l,r,分別表示左右太陽翼;dsi為太陽翼與星本體連接點(diǎn)相對(duì)于航天器質(zhì)心的位置矢量,在星本體系中度量;rsi為太陽翼任意一點(diǎn)dmsi相對(duì)連接點(diǎn)的位置矢量,δsi為變形位移,在太陽翼坐標(biāo)系中度量。
星本體質(zhì)點(diǎn)速度矢量:
天線質(zhì)點(diǎn)速度矢量:
式中:ωs為星本體轉(zhuǎn)動(dòng)角速度;ωa為柔性附件轉(zhuǎn)動(dòng)角速度。
太陽翼質(zhì)點(diǎn)速度矢量:
式中:ωsi為太陽翼轉(zhuǎn)動(dòng)角速度。
星本體質(zhì)點(diǎn)速度在慣性坐標(biāo)系下的矩陣形式表示為:
天線質(zhì)點(diǎn)速度在附件坐標(biāo)系下的矩陣形式表示為:

太陽翼質(zhì)點(diǎn)速度在附件坐標(biāo)系下的矩陣形式表示為:

星本體動(dòng)能為:
(1)
式中:Mb為星本體質(zhì)量陣;Ib為星本體慣量陣。
太陽翼動(dòng)能為:

(2)

大天線動(dòng)能為:

(3)

則系統(tǒng)總動(dòng)能為:
T=Tb+Ta+Tsr+Tsl
(4)
系統(tǒng)總勢(shì)能為:
V=Va+Vsr+Vsl=
(5)
式中:Λa、Λsl、Λsr分別為天線和左右太陽翼的廣義剛度陣。
由拉格朗日方程和偽拉格朗日方法,考慮到天線展開過程中,航天器的轉(zhuǎn)動(dòng)慣量、剛?cè)狁詈舷禂?shù)、天線振動(dòng)頻率均隨時(shí)間改變,忽略太陽翼的轉(zhuǎn)動(dòng),得到變結(jié)構(gòu)航天器的剛?cè)狁詈蟿?dòng)力學(xué)方程為:

(6)

(7)
(8)

(9)

(10)

(11)

式(6)為航天器質(zhì)心的平動(dòng)方程,式(7)為航天器繞質(zhì)心的轉(zhuǎn)動(dòng)方程,式(8)為天線展開質(zhì)心平動(dòng)方程,式(9)(10)為太陽翼振動(dòng)方程,式(11)為天線的振動(dòng)方程。
方程(6)可進(jìn)一步簡化為:
(12)

根據(jù)天線展開的實(shí)際規(guī)律,本文設(shè)定天線展開符合余弦規(guī)律,方程(8)等價(jià)于:
(13)
式中:d為反射器展開過程中質(zhì)心運(yùn)動(dòng)的總距離;T為反射器展開的總時(shí)間。
2 模糊神經(jīng)網(wǎng)絡(luò)自適應(yīng)滑模控制律設(shè)計(jì)
具有PID形式的滑模面如下:
(14)
式中:s=[s1,s2,s3]T;e=αd-α,αd為期望姿態(tài)角,α為實(shí)際姿態(tài)角,所需的控制測(cè)量量與PID控制器相同;
則相應(yīng)的滑模控制律為[19]:
u=ueq+uss=
(15)
式中:ueq為等效控制;uss為切換控制;Kp、Kd為等效控制系數(shù)陣;K、ε為切換控制系數(shù)陣,Kpj=Ijq2j,Kdj=Ijq1j,j=1,2,3。

從而得到姿態(tài)角與控制力矩的近似線性關(guān)系:
(16)
利用模糊神經(jīng)網(wǎng)絡(luò)調(diào)整控制參數(shù),模糊神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)如圖2所示。
圖2 模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)Fig.2 Structure of fuzzy neural network
第1層:輸入層。輸入層的神經(jīng)元和輸入維數(shù)一致,并直接傳遞到下一層。其輸出為:
o1=[xc1,xc2]
(17)
式中:xc1=yd(k)-y(k)=e(k),xc2=wd(k)-w(k)=ew(k),yd和wd為期望姿態(tài)角和姿態(tài)角速度,y和w為實(shí)際姿態(tài)角和姿態(tài)角速度。
第2層:模糊化層。隸屬度函數(shù)采用高斯函數(shù),模糊化層的輸出為:
(18)
式中:i=1,2;j=1,2,…,N,N為模糊集的個(gè)數(shù)。
第3層:模糊推理層。模糊推理層依據(jù)模糊法則進(jìn)行計(jì)算,其輸出為:
o3(i,j)=φ1i·φ2j
(19)
式中:i=1,2,…,N;j=1,2,…,N。
第4層:輸出層。輸出為控制參數(shù)變化量:
(20)
式中:n=p,d;i=1,2,…,N;j=1,2,…,N。
價(jià)值函數(shù)的定義為:
(21)
權(quán)值ωn的變化量為:
(22)
其中:i=1,2,…,N;j=1,2,…,N;n=p,d。
權(quán)值的遞推公式為:
ωn(i,j)|k=ωn(i,j)|k-1+Δωn(i,j)|k+
α[ωn(i,j)|k-1-ωn(i,j)|k-2]
(23)
其中:k為迭代次數(shù)。
高斯函數(shù)參數(shù)cij的變化量為:
(24)
高斯函數(shù)參數(shù)cij的遞推公式為:
cij|k=cij|k-1+Δcij|k+αc(cij|k-1-cij|k-2)
(25)
高斯函數(shù)參數(shù)bij的變化量為:
(26)
高斯函數(shù)參數(shù)bij的迭代公式為:
bij|k=bij|k-1+Δbij|k+
αb(bij|k-1-bij|k-2)
(27)
基于模糊神經(jīng)網(wǎng)絡(luò)的自適應(yīng)滑模控制原理圖如圖3所示。
圖3 控制系統(tǒng)原理Fig.3 Control system diagram
3 仿真系統(tǒng)建立及仿真分析
航天器慣量在25 s內(nèi)從初始狀態(tài)變化為終止?fàn)顟B(tài),如表1所示。太陽翼基頻為0.18 Hz;天線未展開時(shí),基頻為0.7 Hz,天線展開1/3時(shí),天線基頻為0.10 Hz,天線展開2/3時(shí),基頻為0.08 Hz;天線全展開時(shí),基頻為0.12 Hz。
表1 變結(jié)構(gòu)航天器質(zhì)量參數(shù)
初始姿態(tài)為正常在軌運(yùn)行狀態(tài)。柔性附件取前六階模態(tài),天線的展開對(duì)整星姿態(tài)的影響近似為天線質(zhì)心平動(dòng)和天線振動(dòng)兩部分;振動(dòng)頻率和耦合系數(shù)隨結(jié)構(gòu)的改變而變化,由于難以得到大天線展開過程每一時(shí)刻的有限元模型,耦合系數(shù)由展開初始狀態(tài),展開1/3處,展開2/3處的有限元模型插值近似得到。執(zhí)行機(jī)構(gòu)為10 N推力器,在星本體坐標(biāo)下,產(chǎn)生的控制力矩可表示為T=[30,80,30] N·m。在航天器變結(jié)構(gòu)過程中采用滑模控制器,結(jié)構(gòu)固定后切換為PID控制器。取帶寬為天線展開后基頻帶寬0.12 Hz的1/3左右,穩(wěn)定裕度大于70°,則控制參數(shù)初值取為:Kp=[45,50,50],Kd=[800,1 000,1 000]。取RBF神經(jīng)網(wǎng)絡(luò)的隱層節(jié)點(diǎn)為6;FNN第2層節(jié)點(diǎn)數(shù)為10,第3層節(jié)點(diǎn)數(shù)為25。

圖4 姿態(tài)角曲線Fig.4 Attitude angle curves
圖4是天線展開過程及展開后,航天器分別在無控、滑模控制和模糊滑模控制情況下的姿態(tài)角曲線。從圖4(a)可見,無控條件下,天線展開會(huì)使航天器產(chǎn)生15°左右的偏差,如果不對(duì)姿態(tài)進(jìn)行控制將會(huì)對(duì)航天器的正常運(yùn)行造成影響;從圖4(b)可見,采用具有PID型滑模面的滑模控制器對(duì)變結(jié)構(gòu)過程進(jìn)行姿態(tài)控制,航天器姿態(tài)和柔性附件振動(dòng)經(jīng)過500 s左右可收斂到0.04°以內(nèi),姿態(tài)角收斂較慢,且姿態(tài)出現(xiàn)多于3次的明顯振蕩;從圖4(c)可見,模糊神經(jīng)網(wǎng)絡(luò)自適應(yīng)滑模控制器的控制參數(shù)隨著航天器結(jié)構(gòu)的變化改變,經(jīng)過40 s可收斂到0.02°以內(nèi),得到的航天器姿態(tài)角收斂速度明顯加快,且航天器姿態(tài)只出現(xiàn)2次振蕩,有效減小了整星的姿態(tài)振蕩。
圖5是柔性附件的振動(dòng)曲線。從圖5(a)(b)可以看出,太陽翼的振動(dòng)經(jīng)過400 s左右收斂到0.04以內(nèi);從圖5(c)可以看出,天線振動(dòng)經(jīng)1 400 s收斂到0.1以內(nèi),柔性附件振動(dòng)可以得到有效抑制。

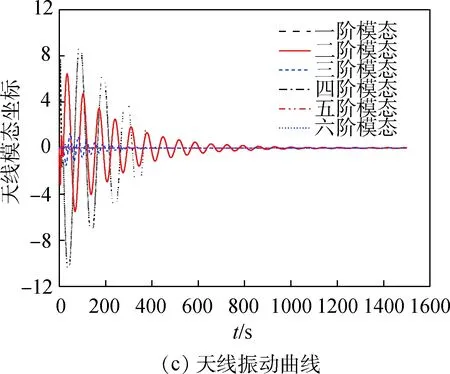
圖5 柔性附件振動(dòng)曲線Fig.5 Vibration curves of flexible appendages
圖6是RBF神經(jīng)網(wǎng)絡(luò)的姿態(tài)估計(jì)誤差曲線,可以看出RBF神經(jīng)網(wǎng)絡(luò)可以在10 s內(nèi)逼近航天器的動(dòng)力學(xué)模型,估計(jì)誤差在10-3(°)以內(nèi),說明有RBFNN得到的近似線性關(guān)系是可信的。
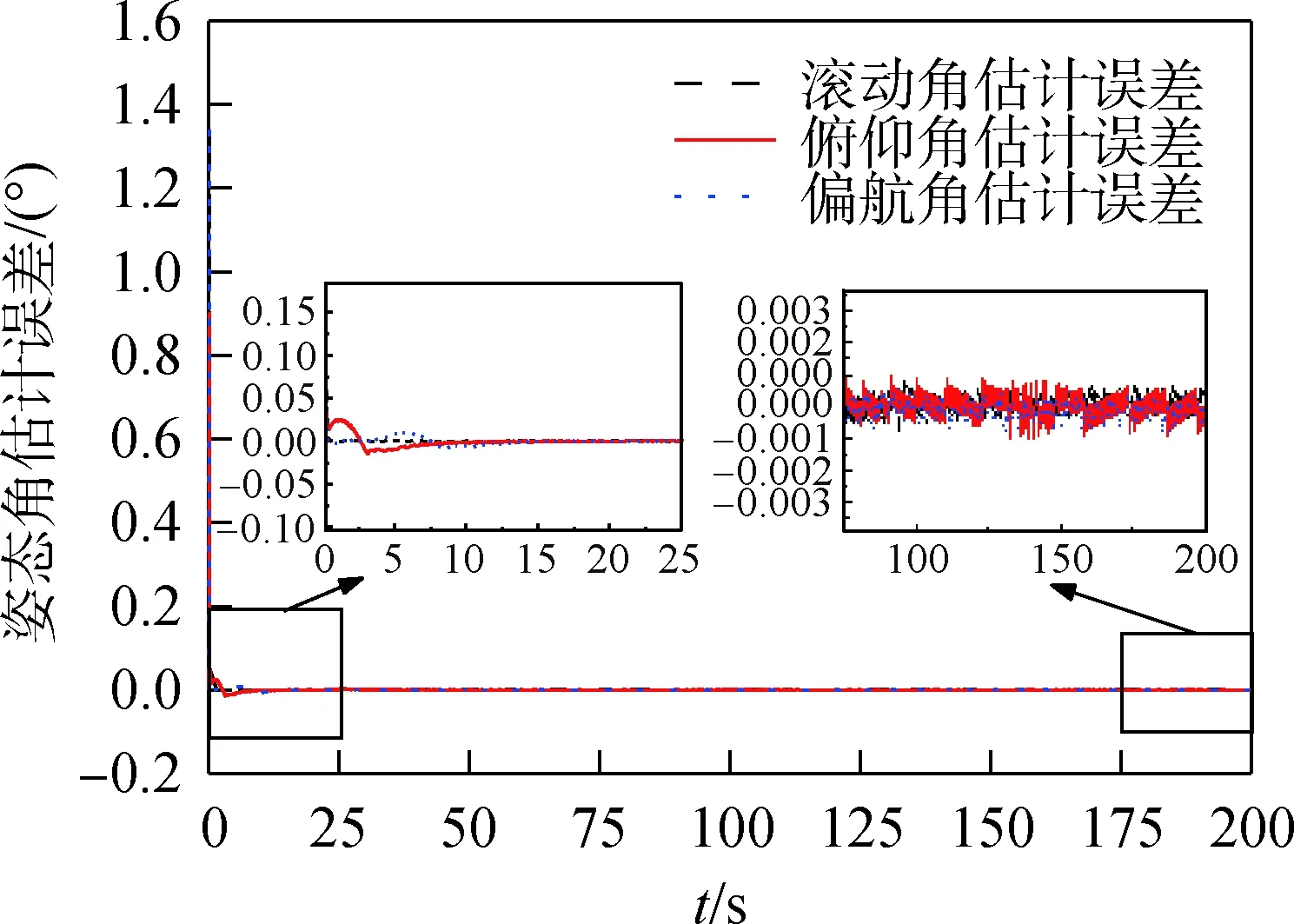
圖6 姿態(tài)角估計(jì)誤差曲線Fig.6 Attitude angle estimation
圖7是控制力矩曲線,控制力矩在航天器的控制能力范圍內(nèi),可以實(shí)現(xiàn)有效的控制。
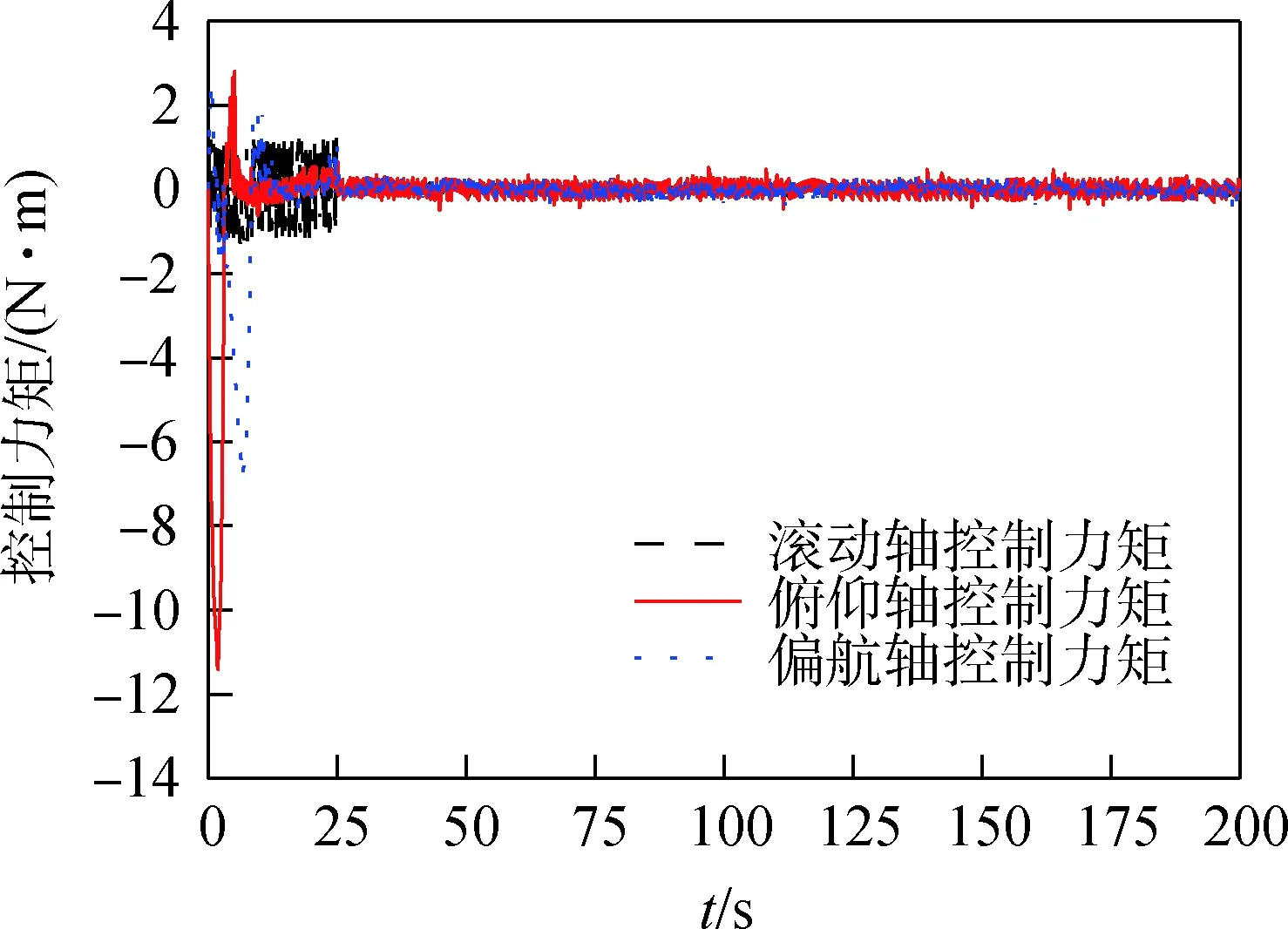
圖7 控制力矩曲線Fig.7 Control effort curves
4 結(jié)束語
本文針對(duì)航天器結(jié)構(gòu)改變影響航天器姿態(tài)穩(wěn)定的問題,對(duì)變結(jié)構(gòu)航天器進(jìn)行動(dòng)力學(xué)建模,在此基礎(chǔ)上設(shè)計(jì)了基于模糊神經(jīng)網(wǎng)絡(luò)的自適應(yīng)滑模控制器,通過對(duì)航天器變結(jié)構(gòu)過程無控、參數(shù)不變的PID型滑模控制和模糊神經(jīng)網(wǎng)絡(luò)自適應(yīng)滑模控制3種情況的仿真,驗(yàn)證了航天器變結(jié)構(gòu)過程中整星姿態(tài)將產(chǎn)生明顯擾動(dòng),有必要對(duì)變結(jié)構(gòu)過程進(jìn)行姿態(tài)控制;模糊神經(jīng)網(wǎng)絡(luò)滑模控制器相對(duì)于參數(shù)不變的PID型滑模控制器,可以使航天器姿態(tài)更快收斂到穩(wěn)定狀態(tài),且姿態(tài)振蕩少,有效提高了控制效果。
未來針對(duì)在軌服務(wù)航天器等動(dòng)力學(xué)參數(shù)有更大不確定性的變結(jié)構(gòu)航天器,需要進(jìn)一步研究本文控制方法的適用性,并根據(jù)實(shí)際需求進(jìn)一步改進(jìn)現(xiàn)有控制方法。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學(xué)生數(shù)理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50