智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作模式優(yōu)化研究
2020-06-30 10:31:03龔政
電力與能源系統(tǒng)學報·中旬刊 2020年1期
關(guān)鍵詞:智能變電站
龔政
摘要:在現(xiàn)行的遠程操作模式應用下,智能變電站數(shù)字運行監(jiān)控系統(tǒng)對遠程操作指令的響應時間較遲緩,為此提出智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作模式優(yōu)化研究。通過對通信數(shù)據(jù)類型、通信協(xié)議的統(tǒng)一轉(zhuǎn)換,以及集成電路卡的通信端口參數(shù)合理配置,實現(xiàn)遠程操作通信方式優(yōu)化;通過搭建每條操作指令發(fā)出兩次次或兩次以上觸發(fā)通信邏輯,采用脈沖性指令,實現(xiàn)對遠程操作邏輯組態(tài)優(yōu)化;運用A/D轉(zhuǎn)換模塊實現(xiàn)信息采集控制優(yōu)化,以此完成智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作模式優(yōu)化研究。
關(guān)鍵詞:智能變電站;監(jiān)控系統(tǒng);遠程操作模式
中圖分類號:TK323文獻標識碼:A
0引言
智能變電站數(shù)字運行監(jiān)控系統(tǒng)是智能電網(wǎng)的重要環(huán)節(jié),也是智能電網(wǎng)調(diào)度控制和生產(chǎn)管理的基礎(chǔ),通過與智能電網(wǎng)信息統(tǒng)一接入、統(tǒng)一展示以及統(tǒng)一存儲,實現(xiàn)對智能變電站的運行監(jiān)測、控制、操作、信息綜合分析以及運行管理等功能,而監(jiān)控系統(tǒng)的運行操作主要依靠第三方遠程操作系統(tǒng)實現(xiàn),當前國內(nèi)外大型智能變電站數(shù)字運行監(jiān)控系統(tǒng),與第三方遠程操作系統(tǒng)應用比較廣泛的主要有LC卡、OPC以及以太網(wǎng)交互機等操作模式,在對監(jiān)控系統(tǒng)進行通信時,通常采用Modlbus協(xié)議,并且通過RS-232 接口連接[1]。由于現(xiàn)有的第三方遠程操作系統(tǒng)的配置和編程差異較大,導致智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作模式在執(zhí)行通信操作時,經(jīng)常發(fā)生通信地址錯位、操作指令重復發(fā)送、操作結(jié)構(gòu)紊亂等現(xiàn)象,現(xiàn)行的操作模式已經(jīng)不適應當前智能變電站數(shù)字運行監(jiān)控系統(tǒng)的發(fā)展需求,需要在原有操作模式基礎(chǔ)上對其進行優(yōu)化,或者研究出新的遠程操作模式改變當前遠程操作模式,此次提出智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作模式優(yōu)化研究,分別從網(wǎng)絡(luò)協(xié)議地址匹配、操作系統(tǒng)邏輯組態(tài)等方面對原有操作模式進行優(yōu)化,為完善監(jiān)控系統(tǒng)遠程操作提供參考依據(jù)。
1智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作模式優(yōu)化研究
1.1遠程操作通信方式優(yōu)化
智能變電站數(shù)字運行監(jiān)控系統(tǒng)與第三方操作系統(tǒng)通信配置中,因不同數(shù)據(jù)類型的操作通信配置不相同,配置情況較為復雜,會影響到第三方操作系統(tǒng)操作通信協(xié)議的通信時間[2]。因此,在第三方操作系統(tǒng)中,利用編程等手段,把通信數(shù)據(jù)類型轉(zhuǎn)換成其他數(shù)據(jù)類型,以簡化通信配置,縮短操作指令的通信時間[3]。監(jiān)控系統(tǒng)遠程操作模式中涉及到的通信數(shù)據(jù)類型僅有四種,下表為智能變電站數(shù)字運行監(jiān)控系統(tǒng)PLC數(shù)據(jù)區(qū)與通信協(xié)議地質(zhì)對應關(guān)系表。
針對監(jiān)控系統(tǒng)的四種數(shù)據(jù)類型,PLC編程時將前兩種數(shù)據(jù)類型全部轉(zhuǎn)換為Inputs Register數(shù)據(jù)類型,僅使用30012-30013這一種通信協(xié)議,并且利用%IJ0000-%IJ10028數(shù)據(jù)區(qū)與其他PLC數(shù)據(jù)區(qū)進行數(shù)值轉(zhuǎn)換,滿足監(jiān)控系統(tǒng)遠程操作通訊需求[2]。在進行智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作通信優(yōu)化設(shè)計時,還要對集成電路卡的通信端口參數(shù)進行優(yōu)化配置,集成電路卡地址與遠程操作數(shù)據(jù)區(qū)通訊處理方式采用周期性的數(shù)據(jù)傳輸方式,確保發(fā)送出去的每條遠程操作指令,通過集成電路卡執(zhí)行兩次指令發(fā)送操作,以此完成對遠程操作模式的通信方式優(yōu)化。
1.2遠程操作邏輯組態(tài)優(yōu)化
在對遠處操作通信方式優(yōu)化基礎(chǔ)上,將所有的操作指令采用脈沖性指令,通過搭建每條操作指令發(fā)出兩次次或兩次以上觸發(fā)通信邏輯,即第一次觸發(fā)通信向遠程操作系統(tǒng)相關(guān)數(shù)據(jù)區(qū)地址置位,第二次和第三次觸發(fā)通信向遠程操作系統(tǒng)該地址復位,保證智能變電站數(shù)字運行監(jiān)控系統(tǒng)能夠及時接收到脈沖型指令,并且保證智能變電站數(shù)字運行監(jiān)控系統(tǒng)正常運行的效果。智能變電站數(shù)字運行監(jiān)控系統(tǒng)控制回路接收到操作指令后,有自保持及狀態(tài)回路完成操作指令,以此實現(xiàn)智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作模式優(yōu)化。
1.3信息采集控制優(yōu)化
將變電站運行數(shù)據(jù)通過A/D轉(zhuǎn)換模塊傳送給單片機,處理后經(jīng)由通信模塊和RS232接口傳送至數(shù)據(jù)中心。信息采集時,由定時器來設(shè)置采集時間間隔,在每次讀取信息之前,應暫停A/D轉(zhuǎn)換模塊的運作,信息讀取完成后再才能啟動A/D轉(zhuǎn)換。
2對比實驗
2.1實驗設(shè)計
實驗的服務器主機操作系統(tǒng)版本為Windows 2012 Server,內(nèi)存為8GB,CPU為Intel Core I3 1250K,并安裝了JRE7.0版本虛擬機,智能變電站數(shù)字運行監(jiān)控系統(tǒng)為四方SDS202。實驗檢驗對比應用優(yōu)化后的操作模式與原有操作模式,智能變電站數(shù)字院線監(jiān)控系統(tǒng)對操作指令響應時間,實驗方法:操作系統(tǒng)后臺執(zhí)行命令,前端同時執(zhí)行自動化程序點擊返回相關(guān)按鈕,執(zhí)行50次,全部操作完畢后,打開操作系統(tǒng)日志,計算時間差。另外針對不同操作指令的響應時間進行對比,對比優(yōu)化前后的時間差異。
2.2實驗結(jié)果
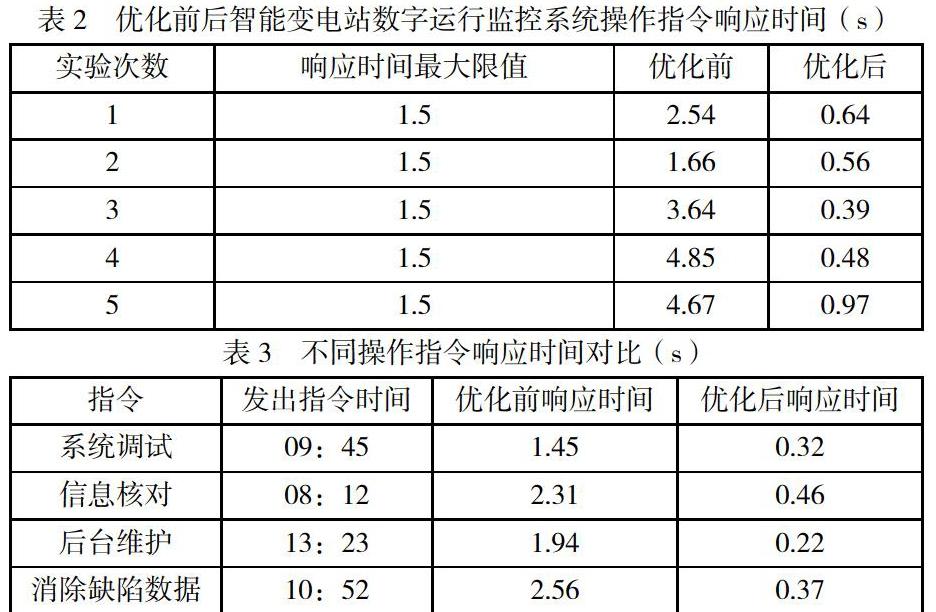
通過十次實驗,得到實驗結(jié)果如下表所示。不同操作指令的響應時間對比如表3所示。
由表2從上表可以看出,針對同一操作指令優(yōu)化后智能變電站數(shù)字運行監(jiān)控系統(tǒng)對操作指令相應時間有所提高,由表3可以看出,對于不同的操作指令,優(yōu)化后的響應時間也遠少于優(yōu)化前的狀態(tài),由此說明優(yōu)化后的遠程操作模式具有一定有效性。
3結(jié)束語
此次對智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作模式優(yōu)化進行了研究,在不改變原有遠程操作硬件設(shè)備前提下,對操作通信方式和操作邏輯組態(tài)進行優(yōu)化完善,提高了智能變電站數(shù)字運行監(jiān)控系統(tǒng)遠程操作模式靈活性和可靠性,并且此次提出的優(yōu)化方案具有較好的通用性,對智能電網(wǎng)合理開發(fā)具有一定的借鑒意義。
參考文獻
[1]?張巧霞,王廣民,李江林,等. 變電站遠程運維平臺設(shè)計與實現(xiàn)[J]. 電力系統(tǒng)保護與控制,2019,47(10):164-172.
[2]?楊清萍,蔡翔,李周,楊先杰. 電力信息通信一體化遠程監(jiān)控平臺建設(shè)與應用分析[J]. 通訊世界,2019,26(05):214-215.
[3]?張偉慶,張建輝,余小嵐. 在移動終端上遠程實時監(jiān)控實驗室和操作儀器[J]. 大學化學,2019,34(01):98-103.
猜你喜歡
中國科技縱橫(2016年20期)2016-12-28 15:16:01
科技傳播(2016年19期)2016-12-27 16:05:30
中國綠色畫報(2016年7期)2016-12-26 16:02:56
中國新技術(shù)新產(chǎn)品(2016年23期)2016-12-26 10:03:58
科技創(chuàng)新與應用(2016年34期)2016-12-23 19:45:32
電子技術(shù)與軟件工程(2016年20期)2016-12-21 11:00:39
電子技術(shù)與軟件工程(2016年19期)2016-12-19 20:31:31
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:05:45
電子技術(shù)與軟件工程(2016年18期)2016-11-14 00:18:29
中國新通信(2016年16期)2016-10-18 11:00:27
