地球低軌道空間站往返月球的轉移軌道設計
2020-07-02 09:44:06高永飛王兆魁張育林
載人航天 2020年3期
高永飛,王兆魁,張育林,
(1. 國防科技大學空天科學學院,長沙410073; 2. 清華大學航天航空學院,北京100084)
1 引言
國際空間站和即將建成的中國空間站都屬于地球低軌道(Low Earth Orbit, LEO)空間站,作為載人航天的在軌空間資源,將支持航天員長期在軌駐留,提供在軌無重力科學實驗環境,并釋放微小衛星等,此外還可為各類飛行器提供在軌維修、加注等在軌服務[1]。 在基于地球低軌道空間站的載人月球探測飛行模式中,載人飛船從空間站出發飛往月球低軌道;航天員在完成月球探測任務后,從月球低軌道出發返回地球并借助大氣減速再次停靠在空間站[2]。 由此可見,載人飛船在地月往返任務中,無論在奔月階段還是返回地球階段,都受到空間站軌道面的約束,而空間站軌道面約束無疑會對這類飛行模式中的軌道轉移窗口產生影響。
研究人員對用于載人飛船地月轉移[3]的一般地月轉移軌道[4-7]、自由返回軌道[8-9]、混合軌道[10-11]和多段自由返回軌道[12]進行了較廣泛地研究。 一般地月轉移軌道僅需滿足近地停泊軌道和近月距的約束[13-15];自由返回軌道則不僅需要滿足地球低軌道出發的約束,同時還需要滿足近月距、再入大氣的一系列約束條件;混合軌道拓展了自由返回軌道可達月球低軌道的范圍;多段自由返回軌道在保證全過程自由返回特性的同時,拓展了可達月球低軌道的范圍。 但目前的軌道設計方法都未涉及對地球低軌道空間站軌道面約束的處理,也未從軌道轉移窗口、速度增量及轉移時間等基本特征出發對基于地球低軌道空間站的載人月球探測飛行模式進行分析。
本文圍繞地月/月地轉移軌道受地球低軌道空間站軌道面約束的問題,基于圓錐曲線拼接模型和蘭伯特問題,提出了相應的軌道設計方法。該方法首先通過解析求解地球低軌道空間站軌道面與月球影響球的交線,將空間站軌道面約束轉化為用于求解地心段轉移軌道的蘭伯特問題;進而通過求解蘭伯特問題得到了空間站軌道面約束下的地月/月地轉移軌道;最后針對軌道轉移窗口、速度增量、轉移時間及可達月球低軌道分布等特征,對基于地球低軌道空間站的載人月球探測飛行模式進行了分析。
2 軌道設計模型
在軌道設計過程中,首先對地球低軌道空間站的軌道面約束在月球影響球處做幾何分析,得到月球影響球入口點或出口點處的位置矢量,進而通過求解蘭伯特問題得到地心段和月心段轉移軌道的軌道根數,軌道設計流程如圖1 所示。
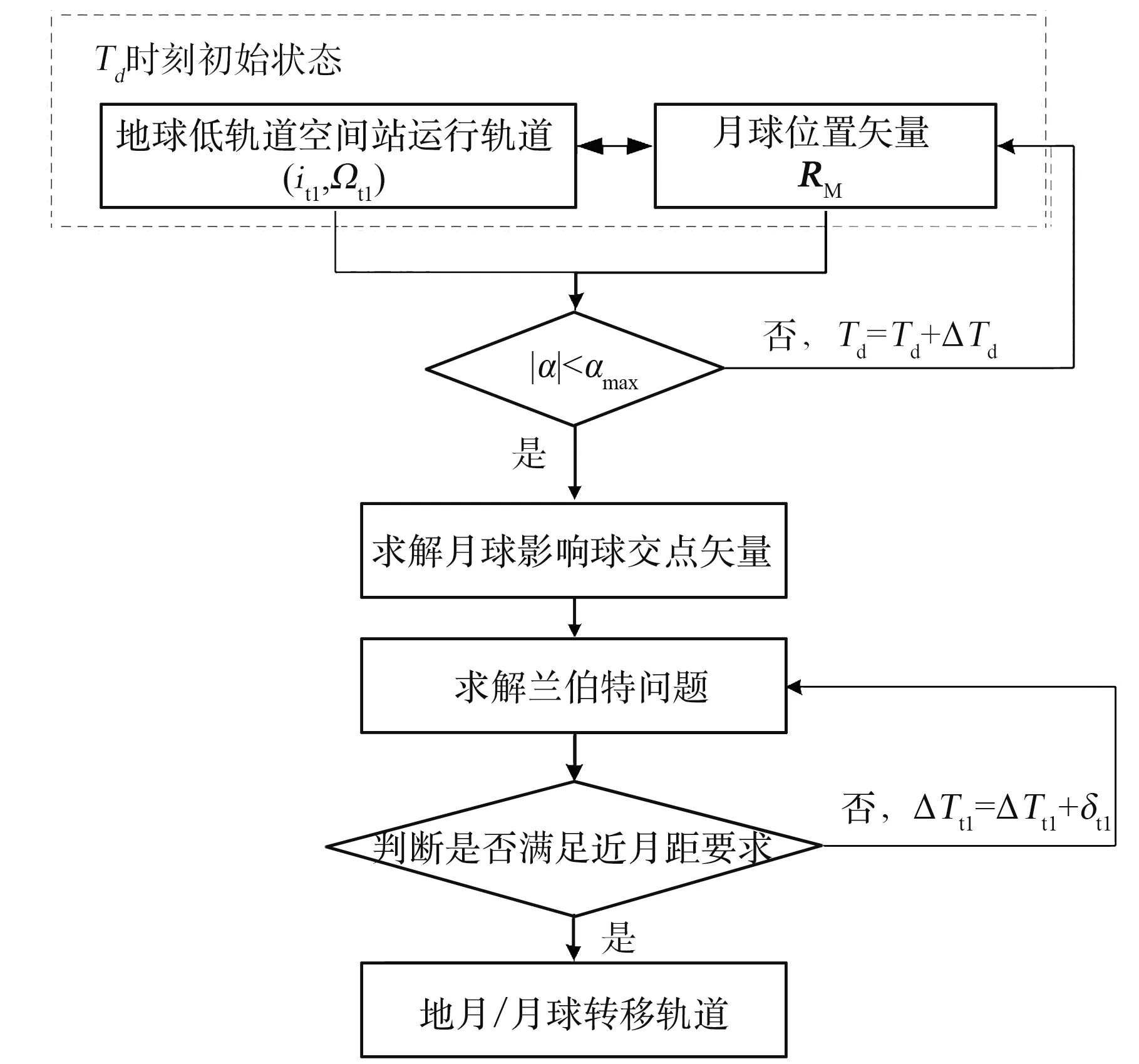
圖1 軌道設計流程圖Fig.1 Flow chart of trajectory design
地月轉移軌道的設計變量如下:①Rd為地月轉移軌道近地點高度;②itl為地月轉移軌道地心段軌道傾角;③ΩtlTd( ) 為地月轉移軌道地心段軌道升交點赤經;④Td為地球低軌道空間站出發進入地月轉移軌道的入軌時刻;⑤ΔTtl為地球低軌道空間站出發轉移至月球影響球的轉移時間;⑥為月心白道坐標系下Ts時刻的入口點緯度,其中Ts為到達月球影響球入口點時刻。
月地轉移軌道的設計變量如下:①ite為月地轉移軌道地心段軌道傾角;②Ωte為月地轉移軌道地心段軌道升交點赤經;③γre為再入點航跡角;④Tre為再入時刻;⑤ΔTte為月地轉移軌道地心段軌道轉移時間;⑥為月心白道坐標系下{Rd,itl,Ωtl,Td,ΔTtl,},軌道設計流程如下:Tse時刻的出口點緯度,其中Tse為月球影響球出口點時刻。
由于月地轉移軌道的設計方法同地月轉移相似,故以地球低軌道空間站出發到達月球的地月轉移軌道為例介紹軌道設計方法。
在軌道設計過程中,Rd、itl、Ωtl由地球低軌道空間站軌道決定,存在關系如式(1)~(3)所示:
式中,ρE為地球平均半徑,HL是空間站軌道高度,iL、ΩL分別為空間站軌道傾角及地月轉移出發時刻的升交點赤經。 給定設計變量

3 高精度動力學模型驗證方法
4 轉移軌道特征分析
式中,J2為地球扁率,iL地球低軌道空間站的軌道傾角,μE為地球引力常數,ρE為地球平均半徑,aL為地球低軌道空間站運行軌道的半長軸。 進一步假設空間站軌道的升交點赤經在2025 00:00:00 TDT 時刻為0°;目標環月軌道的高度假設為200 ~220 km。 在月地返回停靠在地球低軌道空間站時,借助大氣減速技術實現飛船的可重復使用,地球大氣再入條件為γre=- 5.2°和Hre=120 km。
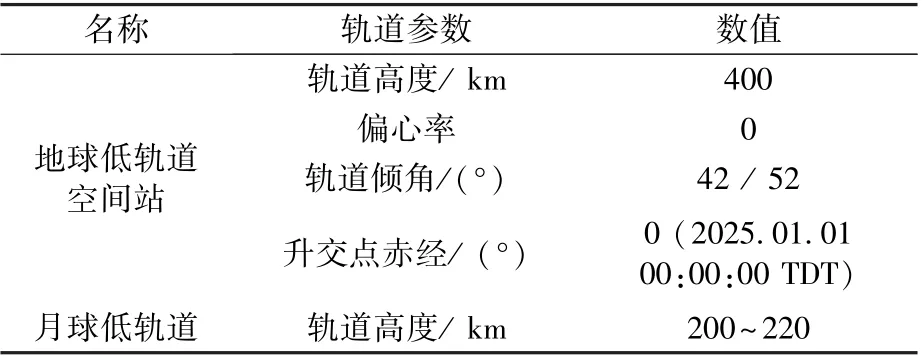
表1 地球低軌道空間站軌道參數及月球低軌道高度Table 1 Parameters of LEO space station and height of low lunar orbit
4.1 軌道轉移窗口
4.1.1 地月轉移
圖4 分別給出了中國空間站和國際空間站出發到達月球低軌道的地月軌道轉移窗口在2025 年的分布及窗口大小,其中紅色曲線為軌道轉移窗口的大小,藍色曲線為相鄰軌道轉移窗口的時間間隔。 表2 給出了從中國空間站或國際空間站出發地月轉移軌道的轉移窗口統計值。 由表可知,從中國空間站或國際空間站出發的軌道轉移窗口分別存在39 個和37 個,平均大小為1.608 8 天和1.656 1 天。 實際上,無論從中國空間站還是國際空間站出發,每月至少存在3 個軌道轉移窗口,這主要由空間站運行軌道的運動所引起。
4.1.2 月地轉移
圖5 分別給出了2025 年從月球低軌道出發返回至中國空間站或國際空間站的軌道轉移窗口分布及窗口大小,其中紅色曲線為軌道轉移窗口的大小,藍色曲線為相鄰軌道轉移窗口的時間間隔。 表3 則給出了相應轉移窗口的統計值。 由表可知,從月球低軌道返回至中國空間站或國際空間站的軌道轉移窗口分別有39 個和37 個,平均大小分別為0.673 9 天和0.566 8 天;與地月軌道轉移窗口相同,月地軌道轉移窗口每月也至少存在3 個。
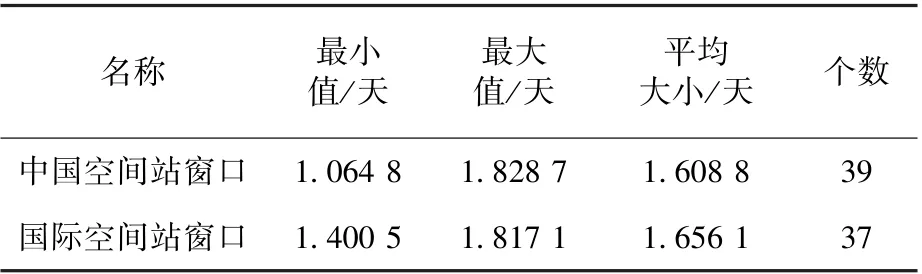
表2 2025 年地球低軌道空間站出發到達月球低軌道的軌道轉移窗口統計值Table 2 Orbit transfer window statistics for mission from LEO space station to low lunar orbit in 2025
圖4 2025 年地球低軌道空間站出發到達月球低軌道的軌道轉移窗口分布及大小Fig.4 Orbital transfer window for the mission from LEO space station to low lunar orbit in 2025
4.2 速度增量及轉移時間
4.2.1 地月轉移

表3 2025 年月地轉移返回至地球低軌道空間站的軌道轉移窗口統計值Table 3 Orbit transfer window statistics for mission from low lunar orbit back to LEO space station in 2025
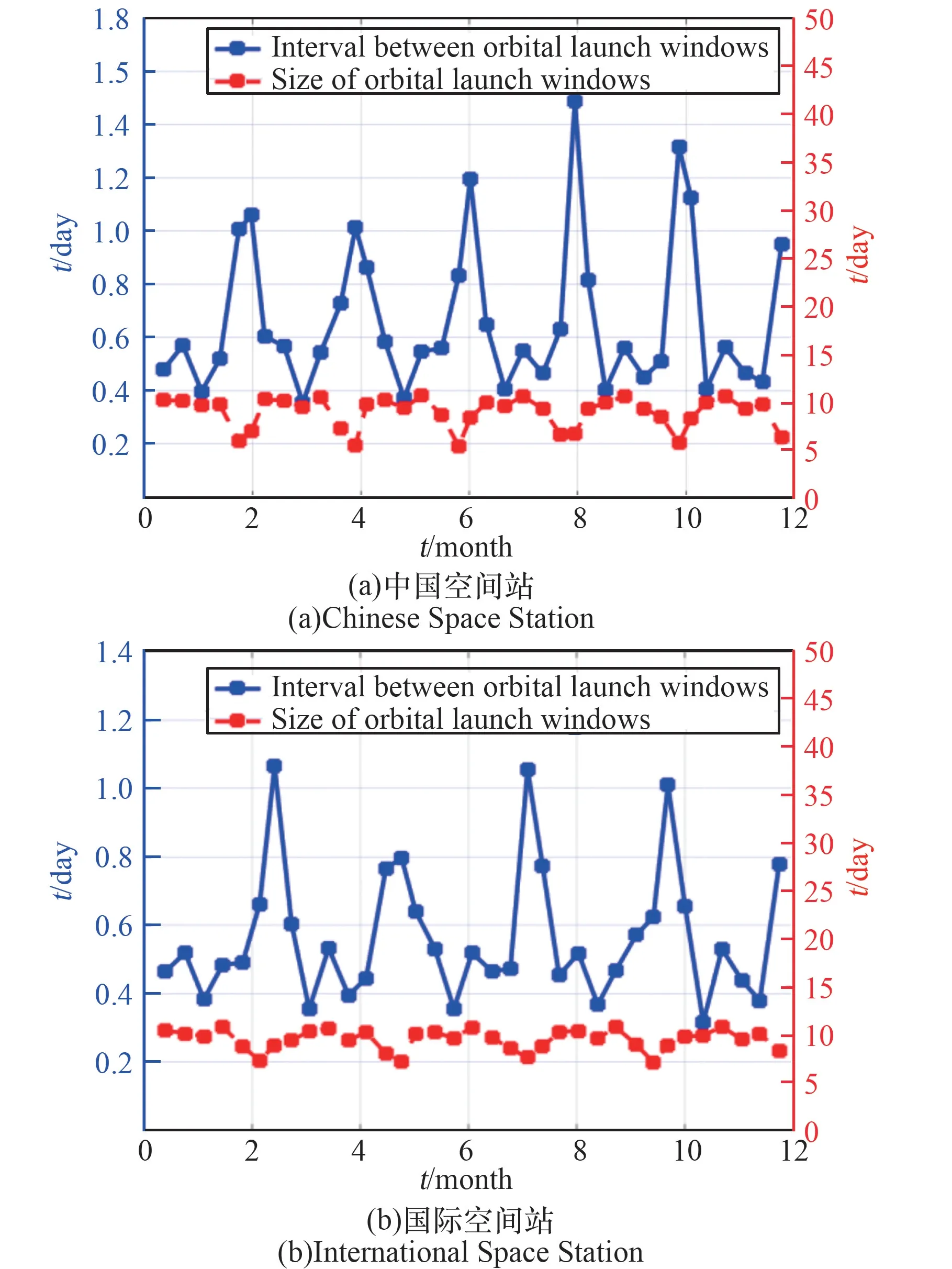
圖5 2025 年月球轉移返回至地球低軌道空間站的軌道轉移窗口分布及大小Fig.5 Orbit transfer window for mission from low lunar orbit back to LEO space station in 2025
地月轉移所需速度增量包括兩部分:地球低軌道空間站出發進入地月轉移軌道所需的速度增量Δvtl和到達月球附近時制動進入月球低軌道所需的近月制動速度增量ΔvLOI。
圖6 給出了2025 年中國空間站和國際空間站出發到達月球低軌道所需的速度增量及轉移時間,圖中顏色條為轉移軌道的相應轉移時間。 由圖可知,速度增量呈現周期性的波動形態,不同軌道轉移窗口中所需的速度增量最小值具有約80 m/s的差異。 同一軌道轉移窗口中,實現地月轉移所需的速度增量介于3 845 m/s 和4 250 m/s之間,其對應的轉移時間介于2.5~4.7 天。
2025 年,對于中國空間站出發的月球探測任務,其所需的最小速度增量為3 840 m/s,對應的轉移時間為4.84 天,最大速度增量為4 233 m/s,對應的轉移時間為2.48 天;對于國際空間站出發的月球探測任務,其所需的最小速度增量為3 848 m/s,對應的轉移時間為4.82 天,最大速度增量為4 289 m/s,對應的轉移時間為2.47 天。
4.2.2 月地轉移

圖6 2025 年地球低軌道空間站出發到達月球低軌道所需的速度增量和轉移時間Fig.6 Velocity increment and time of flight for mission from LEO space station to low lunar orbit in 2025
在討論載人飛船從月球低軌道返回至地球低軌道空間站時,本文提出借助地球大氣減速實現載人飛船的近地制動,故月地轉移所需速度增量僅包括從月球低軌道出發進入月地轉移軌道所需的速度增量Δvte。
圖7 給出了2025 年月球低軌道出發返回至中國空間站和國際空間站所需的速度增量及轉移時間。 與地球轉移速度增量類似,月地轉移所需速度增量同樣存在周期性波動,不同軌道轉移窗口中所需的速度增量最小值具有約80 m/s 的差異。 同一軌道轉移窗口內,速度增量介于760 m/s和1 100 m/s 之間,轉移時間介于2. 5 ~4. 7 天。
具體的,在2025 年返回中國空間站的月地轉移最小速度增量為761 m/s,其相應的轉移時間為4.82 天,最大速度增量為1 098 m/s,其相應的轉移時間為2.48 天;對于返回至國際空間站,月地轉移所需的最小速度增量為764 m/s,其相應的轉移時間為 4.82 天; 最大速度增量為1 113 m/s,相應的轉移時間為2.46 天。
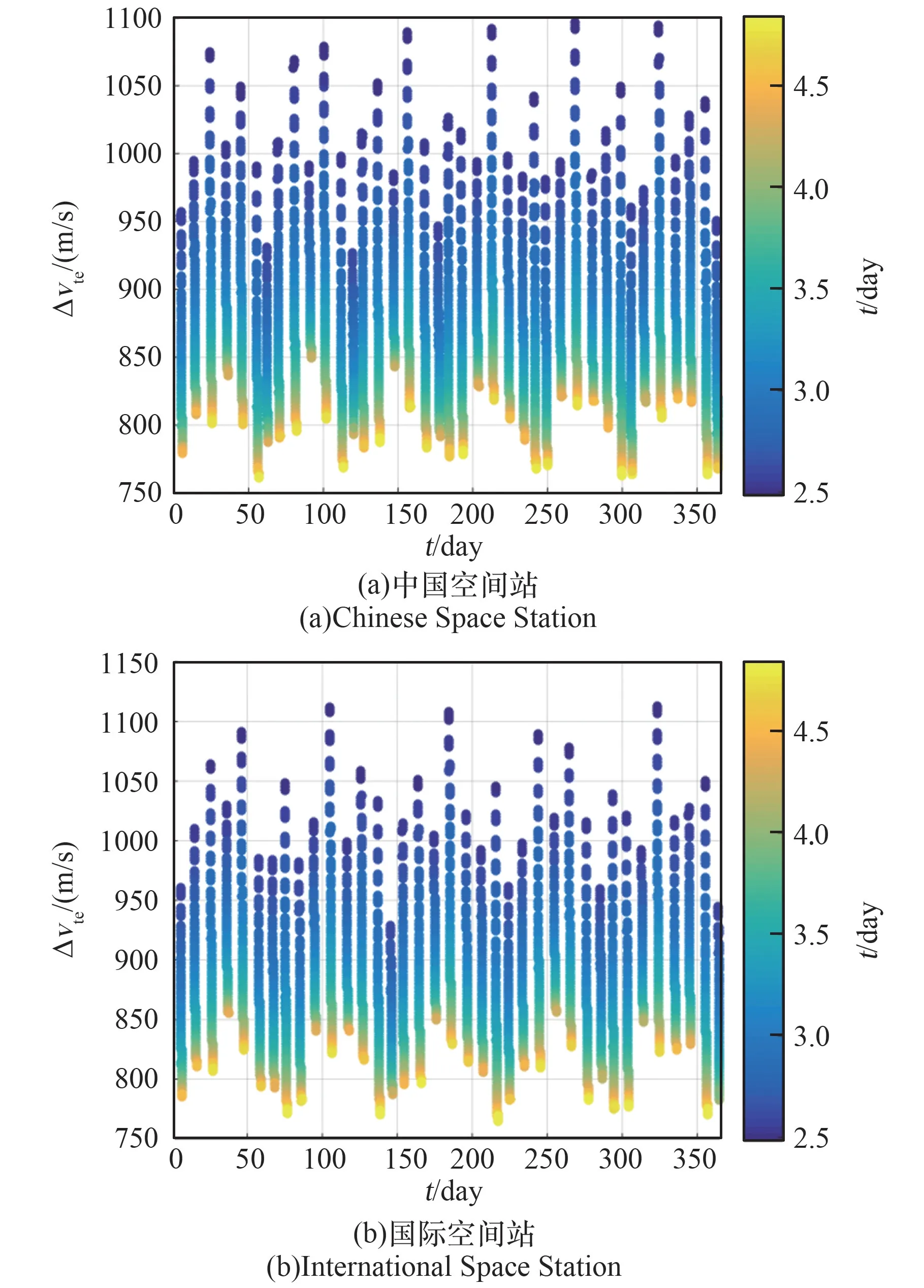
圖7 2025 年月球低軌道出發返回至地球低軌道空間站所需的速度增量和轉移時間Fig.7 Velocity increment and time of flight for mission from low lunar orbit back to LEO space station in 2025
4.3 地球低軌道空間站約束下的月球低軌道特性
為節省燃料,月球低軌道與月面之間的往返飛行采用共面上升與下降方式,故而地月轉移可達的月球低軌道或月地轉移的出發軌道決定了月面的可達范圍。 例如,零傾角月球低軌道僅能支持月球赤道附近的探測任務;極軌月球低軌道則能夠支持全月面的探測任務。 因此,本文針對基于地球低軌道空間站的載人月球探測飛行模式,分析可達月球低軌道與出發月球低軌道在月固坐標系下的軌道傾角-升交點經度范圍。 這里選擇月固坐標系,主要考慮到月球始終只有固定半個球面面向地球,月固坐標系相對于地球和月球的位置關系基本保持不變。
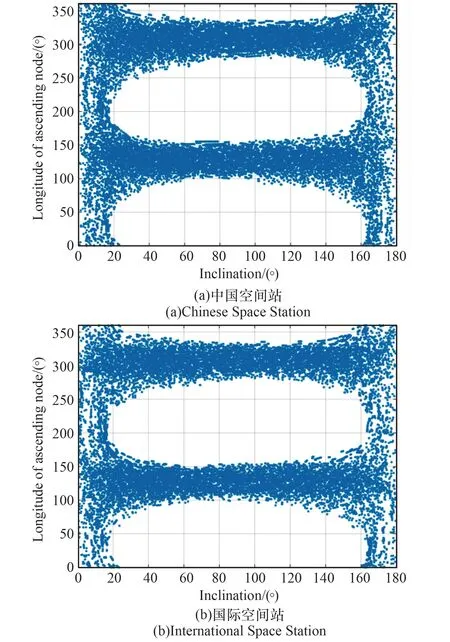
圖8 2025 年地球低軌道空間站出發實現地月轉移的可達月球低軌道Fig.8 The accessible lunar orbit from LEO space station in 2025
4.3.1 可達月球低軌道圖8 分別給出2025 年地球低軌道空間站出發實現地月轉移的可達月球低軌道在月固坐標系下的分布。 其中橫坐標為軌道傾角,縱坐標為升交點經度。 由圖可知,從中國空間站或國際空間站出發的地月轉移軌道可以到達任意軌道傾角的月球低軌道;可達月球低軌道的升交點經度受到限制。 具體而言,從地球低軌道空間站出發,若要轉移至極月球低軌道,則其升交點經度被限制在100°~150°或280°~330°的范圍內。
另外,對比圖8(a)和圖8(b)可知,可達月球低軌道在月固坐標系下具有相似的軌道傾角-升交點經度分布。
4.3.2 出發月球低軌道
圖9 分別給出了2025 年返回至中國空間站和國際空間站的出發月球低軌道在月固坐標系下的軌道傾角和升交點經度分布,其中橫坐標為軌道傾角,縱坐標為升交點經度。
由圖可知,任意軌道傾角的出發月球低軌道都可以返回至中國空間站或國際空間站。與可達月球低軌道相似,出發月球低軌道的升交點經度同樣受到約束。 例如,從極月球低軌道出發返回至地球低軌道空間站,月球低軌道的升交點經度被限制在25°~75°或205°~255°的范圍內。
對比圖9(a)和圖9(b)可知,無論返回至哪類地球低軌道空間站,出發月球低軌道的軌道傾角-升交點經度具有相似的分布。
4.4 高精度動力學模型修正結果
參考阿波羅飛船[17]的阻力系數CD= 1.289 1,地月轉移面質比S/m( )LM=2.9×10-4,月地轉移面質比S/m( )ML=2×10-3,表4 和表5 分別給出了中國空間站和國際空間站往返月球轉移軌道的高精度動力學模型修正結果。 由表可知,高精度動力學模型下的轉移軌道同圓錐曲線拼接法得到的轉移軌道具有較小的差異,利用高精度動力學模型可有效針對軌道面約束下的初始軌道設計結果進行修正。
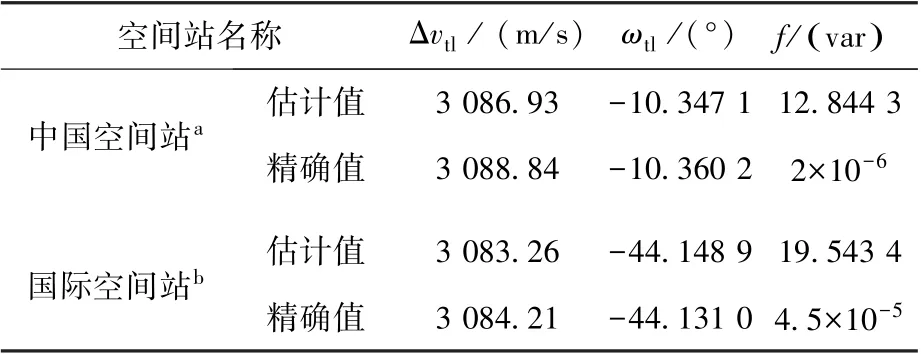
表4 地球低軌道空間站出發到達月球低軌道的參數修正結果Table 4 High-fidelity verification for mission from LEO space station to low lunar orbit
5 結論
1)分析表明中國空間站或國際空間站與月球低軌道之間的往返轉移存在軌道轉移窗口,且每月至少存在3 個。
2)空間站的軌道傾角不影響速度增量與轉移時間;不同軌道傾角空間站的約束下,可達月球低軌道以及出發月球低軌道在月固坐標系下的軌道傾角-升交點經度分布類似。
3)高精度動力學模型下的模型驗證表明初始軌道設計值與高精度動力學模型修正值僅有較小的差異。

表5 月球低軌道返回至地球低軌道空間站的參數修正結果Table 5 High-fidelity verification for mission from Low Lunar orbit back to LEO space station
4)本文提出的空間站往返月球低軌道的轉移軌道設計方法將為基于地球低軌道空間站的載人月球探測飛行模式提供軌道設計的技術途徑,特征分析結果也將為該模式提供可行的理論依據。
5)基于地球低軌道空間站的載人月球探測飛行模式相較于近地軌道一次對接或阿波羅直接登月模式,雖在軌道轉移窗口方面受到限制,但其支持載人飛船的可重復使用,可充分發揮空間站的在軌服務能力,為未來地月空間的商業化開發提供了可行方案。