遙感衛星光學載荷對月定標成像參數系統級分析方法
2020-07-15 09:33:36徐馳趙晨光莫凡
航天器工程 2020年3期
徐馳 趙晨光 莫凡
(北京空間飛行器總體設計部,北京 100094)
為了提高陸表信息定量化反演所需的遙感數據精度,衛星需要進行在軌輻射定標[1]。而在軌天體輻射定標方法由于具有受環境因素影響小、定標頻次高等優勢,越來越受到大家的關注[2-4]。在天體定標中,對月定標的優勢主要包括:①月球是除太陽外視張角最大的地外目標物,一次對月成像可完成星載被動光學載荷大量像元的絕對輻射標定;②月球反射特性十分穩定,適合于探測器輻射響應穩定性跟蹤;③對月定標還具有不受地球大氣影響、定標光譜覆蓋可見近紅外全部譜段等優點[5-6]。上述優勢使得月球非常適合作為衛星在軌輻射定標的參考基準源。
文獻[7]中提出了一種光學遙感衛星對月定標姿態機動補償方法。該方法是基于一定的相機積分時間計算衛星姿態機動所需的姿態控制參數,從而解決星載相機對月成像過程中積分時間與推掃速度失配的問題。然而,該方法并未對定標任務所需的相機增益、級數等成像參數進行分析,不能完全滿足對月定標任務的系統級衛星參數設置需求。文獻[8]中給出了中分辨率成像光譜儀(MODIS)和寬視場海洋水色掃描儀(SeaWIFS)的對月定標方法,但僅介紹了定標的算法相關內容,并未從任務實現的具體流程方面進行詳細闡述。
本文基于遙感衛星光學載荷的特點,提出一種對月定標成像參數系統級分析方法,并基于高分七號衛星的技術狀態仿真驗證了方法的可行性。
1 成像參數系統級分析方法
在選擇對月定標成像參數時,需要從整星的系統級設計層面出發,綜合考慮衛星機動能力、能量平衡、測控弧段選擇等因素。分析方法流程如圖1所示。在對月定標工作模式設計環節,需要基于衛星的技術狀態設計詳細的對月定標時機和姿態機動策略;而相機對月成像積分時間計算、飽和電壓對成像參數的限制,以及信噪比對積分級數的需求環節,需要結合有效載荷的特點進行分析。
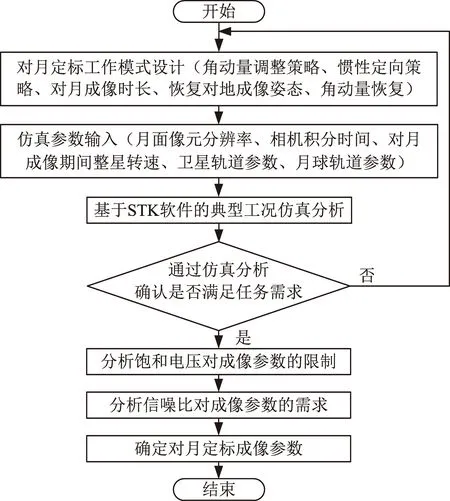
圖1 分析方法流程Fig.1 Analysis method flow
1.1 對月定標工作模式設計
遙感衛星對月定標工作模式涵蓋了從角動量調整及穩定階段、慣性定向階段、對月成像階段、恢復對地成像姿態階段、恢復標稱角動量階段,如圖2所示。
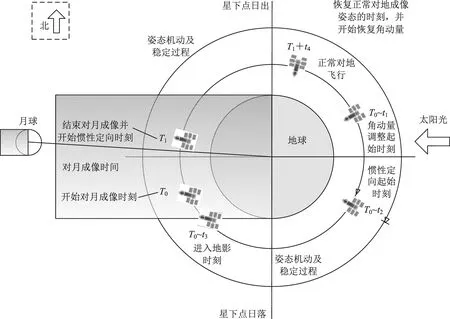
注:t1~t4為各階段姿態機動所用時長。 圖2 對月定標機動策略示意Fig.2 A schematic diagram of attitude maneuver strategy for lunar calibration
(1)角動量調整及穩定階段:通過調整角動量使衛星獲得更強的姿態機動能力。
(2)慣性定向階段:整星進行慣性定向和穩定,建立對月成像所需初始姿態。
(3)對月成像階段:整星繞俯仰軸旋轉,光學載荷對月成像。
(4)恢復對地成像姿態階段:對月成像結束后,衛星進行慣性定向和穩定,恢復對地正常成像姿態。
(5)恢復標稱角動量階段:恢復衛星標稱角動量。
1.2 相機對月成像積分時間計算
地、月、星相對位置關系如圖3所示。圖中:Re為地球半徑;Rm為月球半徑;H為衛星軌道高度;f為光學載荷焦距;Lem為地月平均距離;d為光學載荷像元大小;Sm為月面像元分辨率。
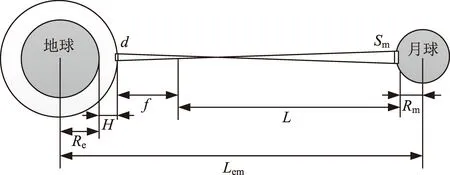
圖3 對月觀測距離關系示意Fig.3 A schematic diagram of imaging distance of moon observation
對于類似高分七號的低軌遙感衛星,其軌道高度約為數百千米,而地月平均距離為38.4萬千米,因此可以假定衛星和月球之間的距離約等于地月之間的距離,故月面像元分辨率為
(1)
衛星拍攝月球時,可以將月球當作一個圓平面,衛星不采用機動執行慣性成像時,在沿軌方向衛星飛行速度vsat在月面上的投影速度vm近似于衛星在赤道平面法線方向的速度分量,即
vm=vsat·cosφ
(2)
式中:φ為衛星對地的緯度。
由于TDICCD積分時間為衛星在月面上掃過一個像元的時間,則對月成像積分時間為
tm=Sm/vm
(3)
1.3 飽和電壓對成像參數的限制
對月成像時需要考慮積分時間設置不能引起器件飽和,基于1.1節的姿態機動方案,可計算出整星繞俯仰軸旋轉時與某一轉速相匹配的相機積分時間,并獲得該積分時間對應的TDICCD電壓,進而判斷該參數設置是否滿足飽和電壓的限制。TDICCD器件信號電壓為
(4)
式中:L(λ)為入瞳輻亮度;R(λ)為TDICCD在滿級數N級時的響應度;λ為波長;M為實際使用級數;t為TDICCD的積分時間;Δλ為波段寬度;τ為相機的光學透過率;F為相機的焦距與孔徑之比[9]。
1.4 信噪比對積分級數的需求
飽和電壓對積分級數作出了最大值的限制,但對月定標時需要獲得更高的圖像質量以提高與自動月球觀測天文站(ROLO)模型的匹配精度,這就對相機的積分級數最小值提出了要求,在選擇合適的成像參數時需要予以考慮。
2 高分七號衛星仿真驗證
2.1 相機對月成像積分時間計算
本節基于上文分析,結合高分七號衛星的技術狀態進行仿真驗證。無姿態機動時,高分七號衛星位于地球不同緯度的對月成像積分時間如表1所示。
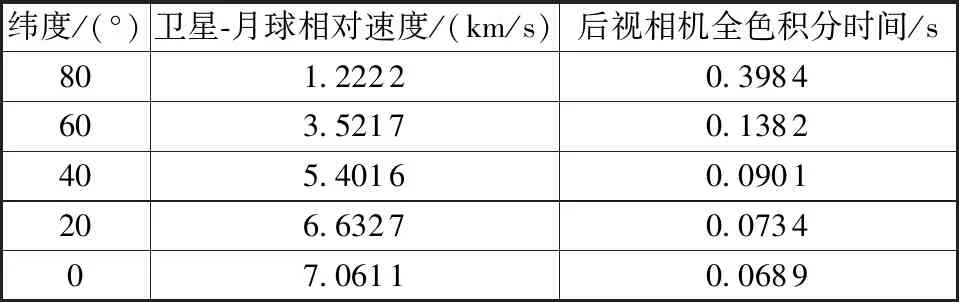
表1 無姿態機動時不同緯度的積分時間Table 1 Integration time at different latitudes without attitude maneuver
由表1可知,高分七號衛星雙線陣后視相機對月成像時,全色譜段所需最短積分時間為69 ms,超出了相機能夠適應的積分時間設置范圍,因此要采用整星繞俯仰軸旋轉的姿態機動方式配合相機對月成像,以減少月球影像畸變。結合高分七號衛星自身的機動能力,設計整星繞俯仰軸轉速為0.06(°)/s~0.12(°)/s。
2.2 STK軟件仿真分析
高分七號衛星運行在近似與赤道面垂直的軌道上,考慮盡量減少姿態建立階段陽照區非正常對地姿態時間,將對月掃描成像軌位選擇在地影區末段,同時保證對月成像期間衛星不出地影,如圖4標紅部分所示。
基于上述定標弧段,選取衛星繞俯仰軸轉速為0.1(°)/s的典型工況進行仿真,衛星姿態仿真曲線如圖5~7所示。由仿真結果可知,該工況下衛星可完成對月定標姿態機動,并在對月定標任務結束后恢復正常對地成像姿態。
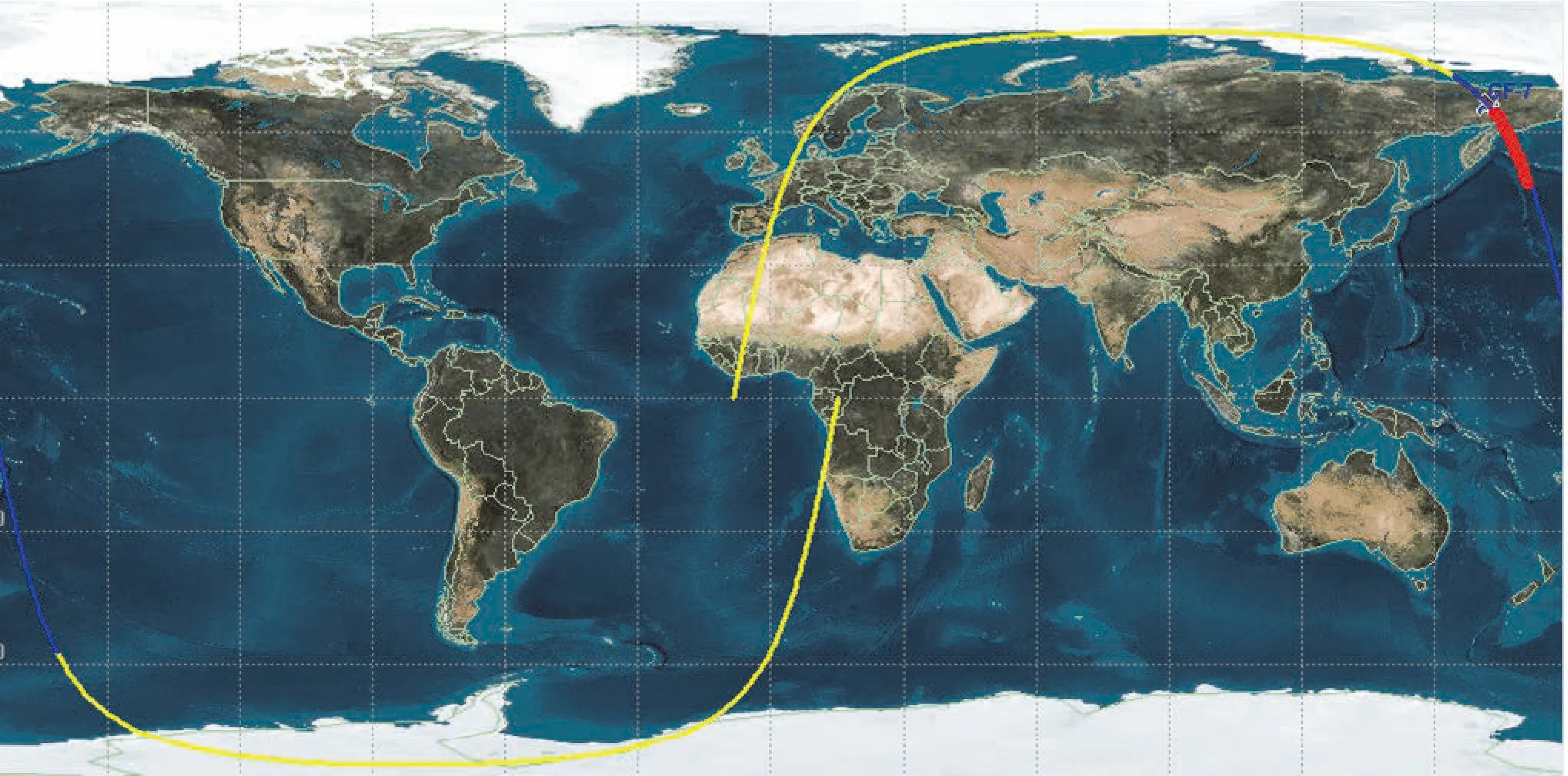
圖4 對月定標典型工況選用弧段示意Fig.4 Orbit arc used for lunar calibration under a typical working condition
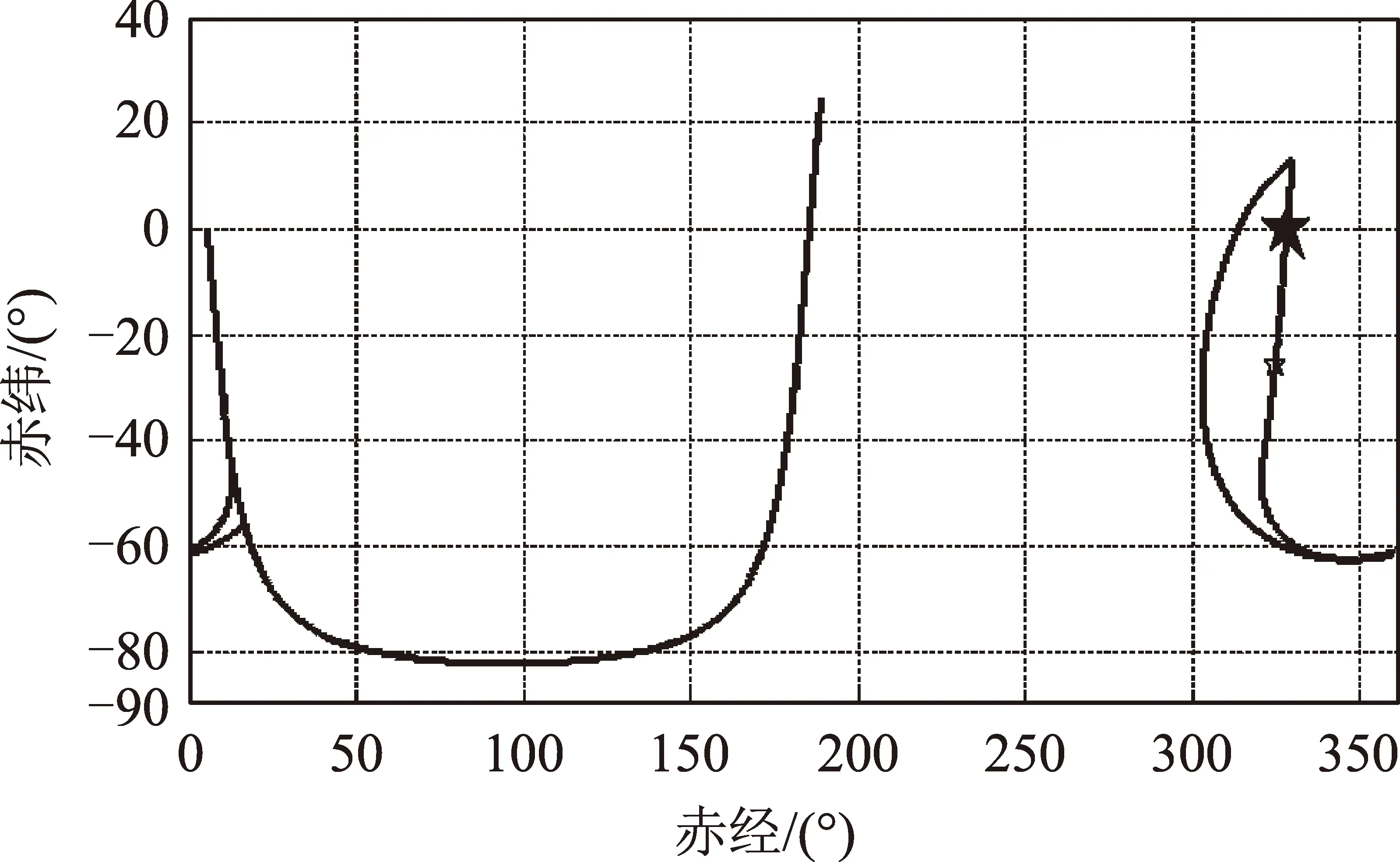
圖5 載荷光軸指向變化仿真Fig.5 Simulated optical pointing direction variation
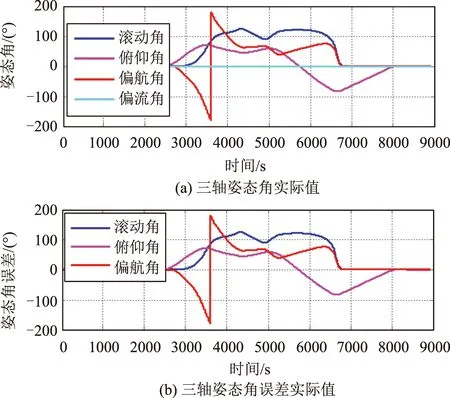
圖6 實際姿態角及姿態角誤差Fig.6 Actual attitude angles and angle errors
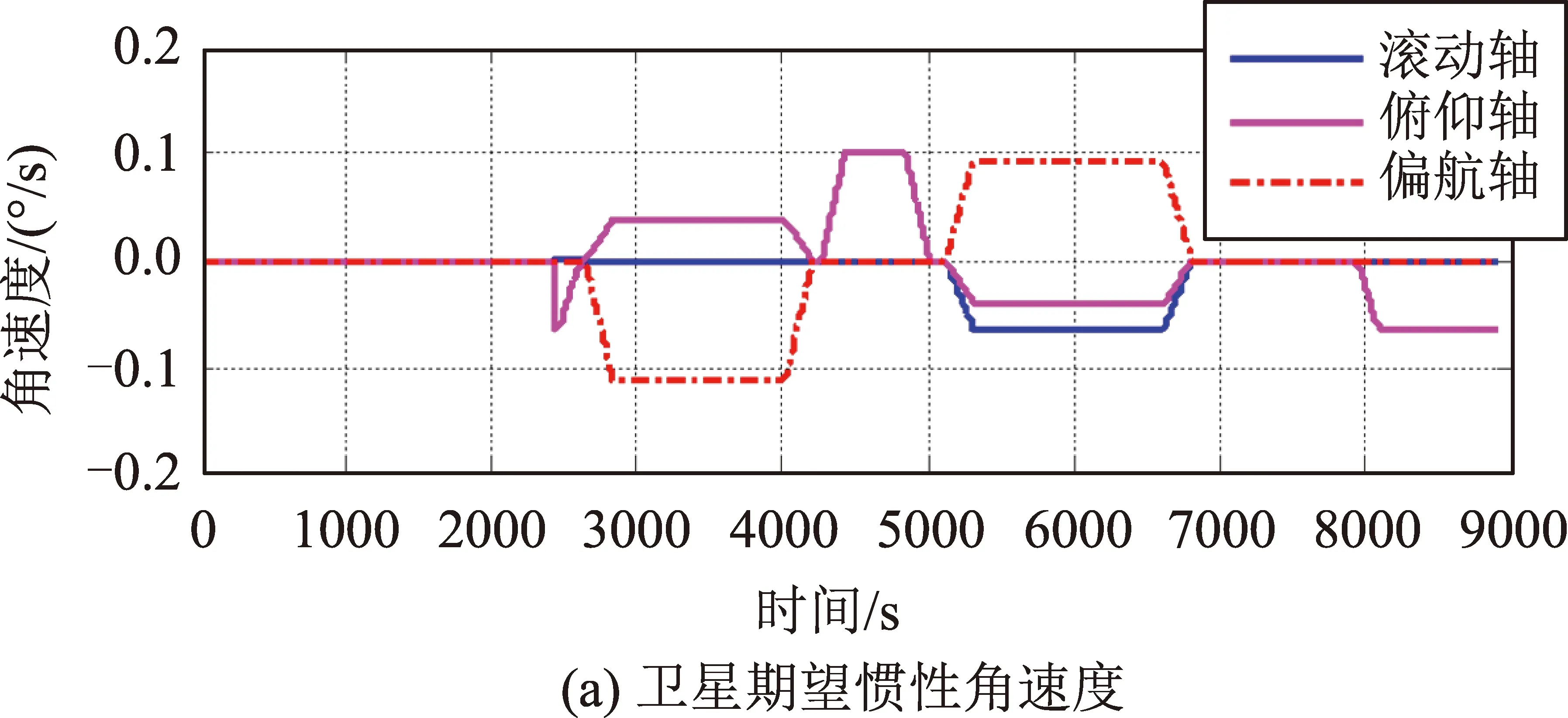
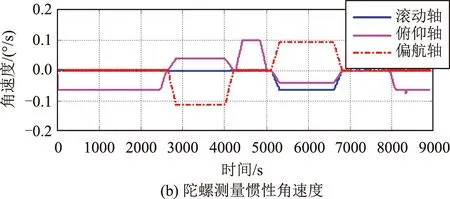
圖7 星上規劃角速度和測量角速度Fig.7 Angular velocities of on-orbit planning and measuring
2.3 飽和電壓對成像參數的限制
以高分七號衛星后視相機為例,計算繞俯仰軸轉速、積分時間及在軌使用積分級數的要求。仿真分為6個工況,如表2所示。
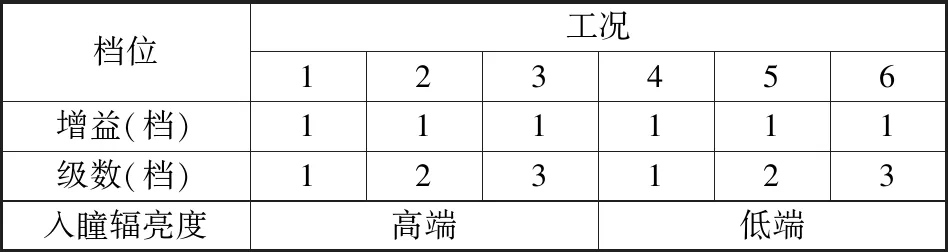
表2 成像參數仿真工況Table 2 Imaging parameters of different working conditions
不同譜段的級數檔位對應的實際積分級數有所不同,本文中級數1檔對應的各譜段級數范圍約8~32級;2檔約36~64級,3檔約72~128級。基于第2.1節分析,以整星繞俯仰軸轉速為0.06(°)/s~0.12(°)/s為邊界條件,選取表2中的增益和積分級數進行仿真計算。根據各器件截止電壓,成像參數的設置范圍如圖8~9所示。
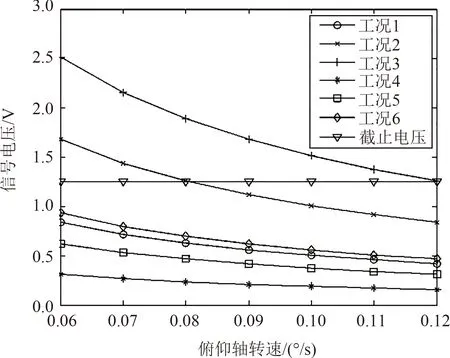
圖8 不同工況下后視相機P譜段俯仰軸轉速與 信號電壓的關系Fig.8 Relationships between signal voltage (P-band) and rotation speed under different working conditions for backward viewing camera

圖9 不同工況下后視相機多光譜譜段俯仰軸轉速與信號電壓的關系Fig.9 Relationships between signal voltage and rotation speed under different working conditions for backward viewing camera (multi-spectral bands)
由上文分析可得:對于P譜段,轉速小于0.08(°)/s時,可以選擇除工況2、工況3外的成像參數;對于P譜段,不建議使用工況3的成像參數;對于B4譜段,轉速小于0.09(°)/s時,可以選擇除工況3外的成像參數;對于B1~B3譜段,可以選用工況1~工況6的成像參數。
2.4 信噪比對積分級數需求分析
參考第2.3節分析的結果,選用高分七號衛星在軌常見工況(工況2和工況5)作為輸入,基于衛星不同轉速計算信噪比,結果如表3所示。
若按照一般圖像處理的高入瞳輻亮度信噪比高于48 dB、低入瞳輻亮度信噪比高于23 dB指標要求,由表3數據可得:對于B1,B2,B3譜段,轉速大于0.09(°)/s時,在不超過飽和電壓的前提下,應在雙線陣相機在軌常用成像參數的基礎上適當調高積分級數,以獲取更好的信噪比;對于P譜段和B4譜段,在衛星的機動能力范圍內,雙線陣相機在軌常用成像參數能滿足信噪比要求。目前,高分七號正在進行在軌測試,將擇機依據本文所述方法開展對月定標試驗。
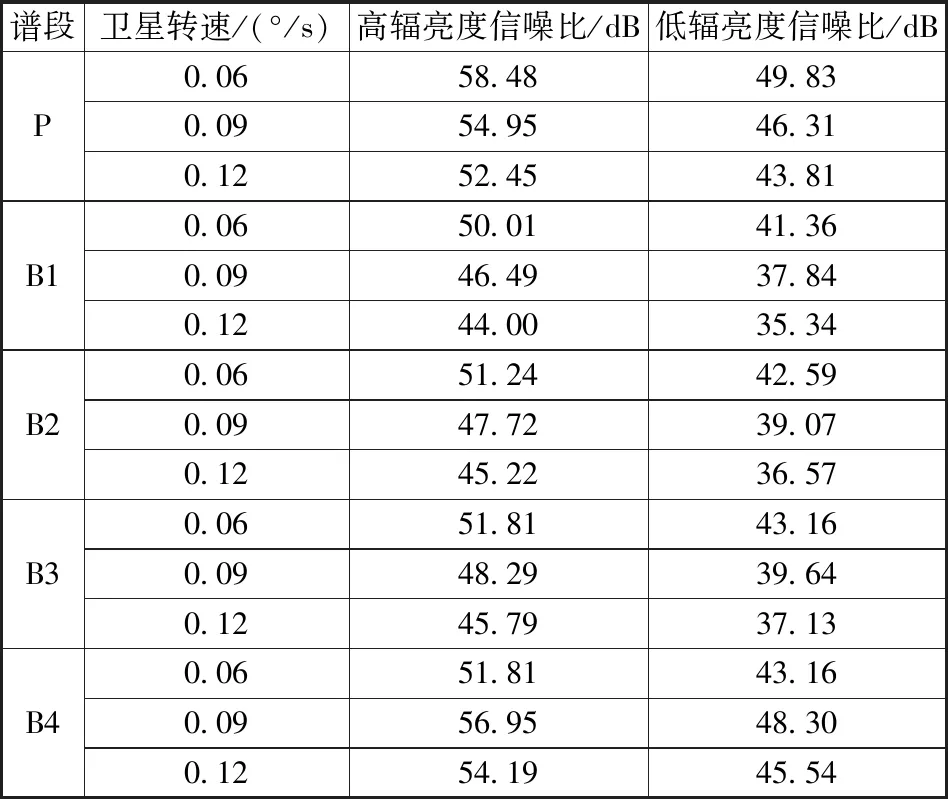
表3 在軌常見工況信噪比分析Table 3 SNR analysis of common working conditions
3 結束語
本文針對遙感衛星在對月定標任務中光學載荷對成像參數的分析需求,提出了一種對月定標成像參數系統級分析方法,并基于高分七號衛星技術狀態設計了對月定標工作模式,通過STK軟件進行了典型工況仿真和計算驗證,獲得了適用于高分七號衛星對月定標任務的載荷成像參數,證明了本文方法的有效性。該方法具有較強的普適性,將其應用到遙感衛星光學載荷對月定標任務中,可保證對月成像的圖像質量。后續可通過研究基于本方法的定標數據地面處理技術,進一步提高定標精度,為基于衛星遙感影像的陸表信息定量化反演提供更精準的數據。