過程控制技術在污水處理中的應用
2020-07-17 02:55:42吳宇行王曉東
凈水技術 2020年7期
關鍵詞:模型
吳宇行,王曉東,樸 恒
(青島理工大學環境與市政工程學院,山東青島 266000)
污水處理廠進水水質、水量波動大,為保證處理效果,污水處理廠對工藝控制具有嚴格的要求。前饋控制、反饋控制、復合控制、模型預測控制等一系列過程控制技術在污水處理中受到重視。部分污水處理廠通過人工控制或簡單的自動控制系統對曝氣系統、藥劑投加系統進行控制。采用傳統控制方法,污水處理廠為保障出水水質達標存在較為嚴重的過度曝氣、過量投加藥劑的問題。
本文綜述了前饋控制、反饋控制、復合控制和模型預測控制的結構,以及其在藥劑投加控制和曝氣控制上的研究與應用,此外,對前饋控制、反饋控制和模型預測控制的優勢和弊端分別進行了討論。
1 控制系統
發達國家對控制系統的研究與應用起步較早,美國于20世紀70年代中期開始實現污水處理廠自動控制,90年代以后,我國才引入自動控制系統[1]。污水處理過程控制系統即通過應用在線監測設備對污水處理過程中的關鍵指標,如COD、氨氮、總氮、硝酸鹽、亞硝酸鹽、堿度、溫度、進水流量等進行監測,對污水處理過程加藥量、曝氣量進行自動控制,以達到減少能耗和藥劑投加、提升出水水質和減少人員干預的目的。
在實際污水處理工程中,過程控制系統主要包括前饋控制、反饋控制以及復合控制。由于污水生化處理過程具有非線性、不確定性和大滯后等特點[2],近年來,模糊控制、神經網絡控制等智能控制技術越來越多地應用在污水處理過程中[1],與傳統技術相結合發展出一系列新的控制系統[3-6]。模型預測控制得到長足的發展[7],應用智能控制技術優化模型預測控制成為研究熱點。
2 控制系統的結構
2.1 前饋控制的結構
前饋控制方框圖如圖1所示,由控制元件、執行器、終端控制元件、測量設備、控制系統模型等組成。前饋控制的控制思路是通過對重要參數進行測量,通過預先建立的控制系統模型對系統擾動可能造成的影響進行補償,在擾動變量影響控制過程之前,控制元件根據監測的擾動變化通過執行器對干擾進行補償,理論上具有避免誤差產生的能力。
2.2 反饋控制的結構
反饋控制結構如圖2所示。反饋控制系統是一個閉環系統,核心部分包括控制元件、執行器和終端控制元件。在工藝運行過程中,測量設備(傳感器等)對被控量進行監測,被控量隨后通過比較元件與預設值進行對比,控制元件根據測量的被控量和預先設定的設定值或參考值之差(即誤差)對控制系統進行調整,通過執行器對下一次行為進行控制,達到將溶解氧濃度維持在設定值的目的。與前饋控制不同,被控量誤差產生之前,反饋控制不對控制行為進行調整。兩種典型應用于污水處理過程中的反饋控制器是開關控制器和比例-積分-微分(PID)器,在污水處理工業控制中占支配地位。
2.3 復合控制的結構
復合控制系統結構如圖3所示。復合控制的常見形式是前饋控制與反饋控制嵌套聯用。通過前饋控制對干擾變量可能造成的誤差進行預測控制,對控制系統進行調整;通過反饋控制對系統進行勘正,提高控制精度。因此,應用復合控制可以發揮兩者的優勢,有效緩解單獨使用前饋控制或反饋控制造成的弊端,得到較好的控制結果。

圖3 復合控制系統方框圖Fig.3 Block Diagram of Compound Control System
2.4 模型預測控制的結構
模型預測控制結構如圖4所示。
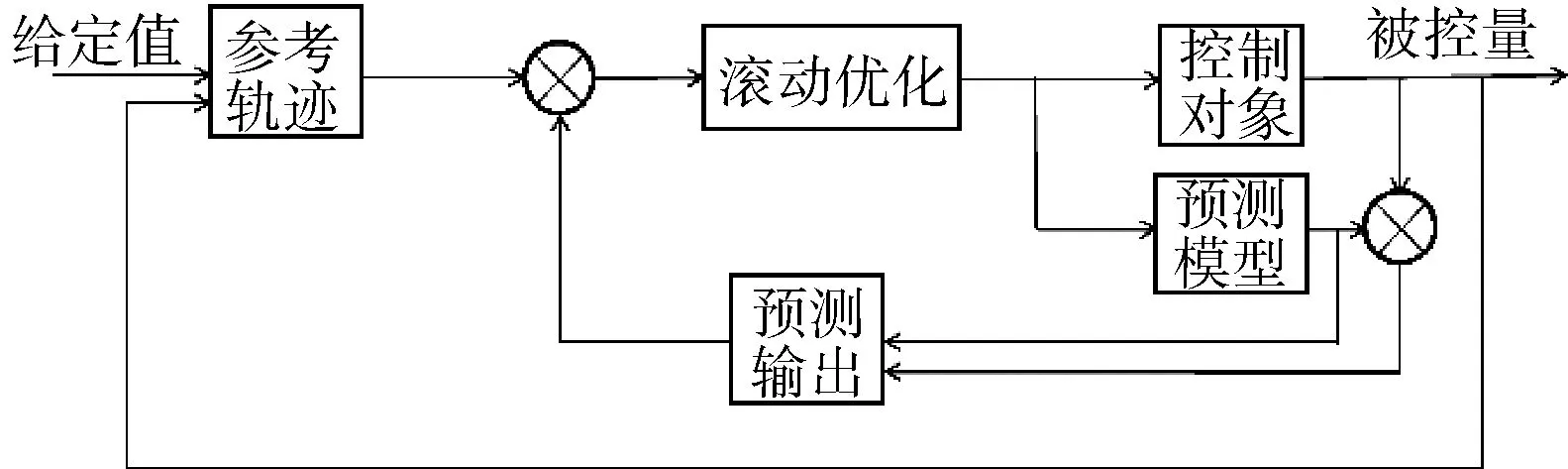
圖4 模型預測控制結構圖Fig.4 Block Diagram of Model Predictive Control System
模型預測控制(MPC)是一種基于模型的閉環優化控制策略,包括內部模型、滾動優化和反饋控制。模型預測控制計算分3步進行:首先,利用模型預測被控過程的輸出變量;然后,在約束條件下,最小化給定的目標函數,盡量使預測的過程輸出變量與預期參考信號接近,計算未來控制序列;最后,控制器執行控制序列的第1個輸出值,在下一次控制時應用本次優化的數據進行重復優化[8]。
3 控制系統在藥劑投加方面的研究與應用
污水處理過程中,化學藥劑的投加對保障出水水質具有關鍵作用,進水的水質水量指標是藥劑投加量的關鍵影響因素。應用控制系統對水質水量波動進行在線監測,根據監測結果進行自動控制是當前研究的重點。國內污水處理廠普遍采用人工手動控制的方式進行操作。人工手動控制造成2個弊端:(1)外源藥劑投加過量,造成藥劑浪費和成本增加;(2)進水水質水量波動嚴重時,出水超過排放標準,無法保證出水水質達標[9]。過程控制可以很好地應用在外加藥劑控制方面,達到靈活控制、節約藥劑成本、提升出水水質的目的。
早在2001年,Lee等[10]對焦化廠廢水外加碳源控制進行研究,研究的控制策略包括前饋控制和開關控制。前饋控制可根據進水硝酸鹽濃度對外加碳源的投加進行控制,與開關控制相比,應用前饋控制時出水中COD與硝酸鹽的濃度更加穩定,并達到避免亞硝酸鹽積累的目的。安泳等[9]對青島市婁山河污水處理廠實際運行的自動加藥系統進行研究。該系統根據污水流量和出水水質,應用反饋控制建立,運行以來系統波動次數顯著減少,表現出良好的穩定性,出水水質保持在設定值附近,藥劑單耗降幅達12%~34%,每年節約污水處理廠藥劑費約171萬元,證明應用過程控制系統控制藥劑投加具有節約運行成本的潛力。邱勇等[11]對比多種動態加藥控制系統,發現出水反饋控制可以在改善出水磷酸鹽濃度的同時,減少藥劑浪費的需求(試驗證明可以節約16%的藥劑)。
在應用復合控制方面,方榮業等[4]建立BP神經網絡前饋預測和反饋PID的復合控制系統,在污水處理廠運行1個月后,出水COD達標率與人工控制相比提高了8.88%,活性炭日均消耗量減少了16.61%。
4 控制系統在曝氣控制方面的研究與應用
曝氣是污水生化處理的重要組成部分。曝氣系統的能耗占到污水處理廠總能耗的30%~70%,也是污水處理廠最具節能潛力的處理單元。曝氣控制的主要任務是在保證出水水質的前提下盡可能地節省能耗。曝氣量過小會造成溶解氧濃度過低,從而影響生物降解和硝化反應的進行;曝氣量過大既會造成能源的浪費,也可能會使消化液攜帶過多溶解氧,從而破壞反硝化缺氧環境,影響反硝化脫氮效果[12]。
曝氣控制系統中供氣系統、傳感器以及控制策略的選擇都會影響最終的控制效果[13]。傳感器對污水處理過程中的重要指標進行在線測量,通過不同控制策略對供氣系統進行調控,從而進行曝氣控制。當前,曝氣控制主要對DO在線監測和營養鹽在線監測方法進行研究。由于進水水質的波動性和生化反應環境的不確定性,對曝氣控制的精度有較高的要求,如何兼顧節能與污水脫氮效果成為研究重點,改進過程控制技術實現精確曝氣是曝氣控制未來的發展目標。精確曝氣是根據曝氣池當前運行需要的曝氣量對曝氣系統進行精確控制,將曝氣量維持在設定值附近,既保證了硝化需求,也降低了曝氣能耗,實現兼顧節能和保障、提升出水效果的目的。實現精確曝氣需要根據污水處理廠的實際運行情況建立有效的模型,根據模型計算出當前運行需要的曝氣量并進行精確控制[14-15]。隨著在線監測設備的發展與智能控制技術的應用,傳統控制技術得到新的發展。未來通過精確曝氣保障出水水質和能耗控制的研究方向將由溶解氧、出水氨氮的反饋控制擴展到基于生化反應動力學模型的以計算實際需氧量和傳質效率為基礎的精確供氧控制[12]。
4.1 前饋控制和反饋控制
在AAO中試試驗設備中進行前饋控制試驗,根據進水指標的變化前饋調整溶解氧設定值,并采用前饋控制方式基于進水流量、COD濃度和第一好氧池氨氮濃度控制內回流比的脫氮效果[16]。試驗中,出水氨氮濃度始終沒有超過限值,出水總氮和總磷濃度分別下降29.9%和65.5%,并減少約38%的能耗。Revollar等[17]提出了基于PID的分級控制結構,應用效率指數對活性污泥過程中去除的氮與去除氮所消耗的能量進行量化,并將效率指數作為重要的控制指標,提高了污水處理廠的脫氮性能。
在線監測設備的故障、可靠性差以及某些指標在線監測困難等問題會影響前饋和反饋對曝氣系統的控制能力。項雷軍等[18]針對污水處理廠溶氧儀損壞、測量精度差或可靠性差等原因造成的系統抗干擾能力弱、難以追蹤溶解氧等控制問題,采用狀態觀測器與模型預測控制相結合的方法,構成了具有良好動態穩定性能的輸出反饋預測控制系統。針對COD難以實時準確測量的難點,許玥[19]應用軟測量技術對COD進行預測,并根據預測結果建立模型。利用模糊PID控制器進行調控,對COD濃度設定值和鼓風機功率進行優化,優化后噸水電耗降低40%~45%。
智能控制技術與前饋控制和反饋控制相結合是另外一個研究方向。葉鳳英等[20]在常規PID控制基礎上設計出模糊神經網絡PID控制器并對DO濃度進行控制。根據仿真模擬結果,該控制系統具有很強的魯棒性和穩定性。王子昊[5]基于序批式活性污泥工藝,研究以缺氧/好氧停留時間比、表面氣速為控制變量對系統脫氮效果的影響,并構建了前饋神經網絡模型。根據浙江某城鎮污水處理廠1年的實際運行數據,運用該模型對風機風量進行優化選擇,可降低約9.3%的電力成本。

4.2 復合控制
復合控制同時具有前饋和反饋控制的優勢,有更好的處理效果。2014年,薛美盛等[3]提出基于氨氮前饋的溶解氧模糊自適應PID控制,與常規的PID控制相比,復合控制在保證出水氨氮低于5 mg/L的同時,節約28.3% 的能耗,表現出良好的節能效果。胡雨沙等[26]以清遠某污水處理廠為例對進水COD進行預測,根據預測結果建立了前饋-反饋復合控制系統。試驗證明,進水COD預測模型具有很高的精度,根據準確的進水量和進水COD的預測結果調整鼓風機的開度,可減少該污水處理廠7.1%的運行成本。
智能控制在復合控制的應用方面,張愛娟等[6]提出基于專家前饋控制器和模糊PID反饋控制器的前饋-反饋控制,建立的復合控制系統在參數變化時魯棒性好,自適應能力強,證明智能控制與前饋-反饋控制的復合控制可以得到很好的控制效果。
4.3 模型預測控制
在2008年,Shen等[27]將模型預測控制應用于基準模擬模型中,并與基于進水流量測量的前饋控制相比較,證明模型預測控制可以有效應用于污水處理過程控制中。Vrecko等[28]提出了一種氨氮模型預測控制器,并將其應用在中試規模活性污泥工藝中進行評價。結果表明,氨氮模型預測控制器對氨氮的處理效果優于氨氮PI控制器,但與氨氮前饋PI控制器相比,效果略差,能耗較高。隨著氨氮非線性簡化模型精度的提高,在控制器內部使用更復雜的控制標準,模型預測控制具有進一步優化的潛力。
O’Brien等[29]論述了將模型預測控制應用于低COD負荷的污水處理廠的實例,并將模型預測控制與水廠原本的開關控制的運行效果進行了比較。試驗證明,模型預測控制可有效將每個運行階段的溶解氧控制在設定值。在模型預測控制實際運行期間,整體用電量平均減少20%,工藝效率提升至少25%。由此可知,污水處理廠實時監控成功的關鍵是儀表設備和信息基礎設施的穩定性。
近年來,綜合現有控制方法的優點,開發新控制器成為一種趨勢。張學陽等[30]綜合神經網絡控制和預測控制兩種方法的優點,構建神經網絡預測控制器,在白噪音干擾和進水流量階躍變化的情況下對溶解氧時變設定值進行跟蹤控制。根據仿真試驗,新開發的神經網絡預測控制器應對干擾時,能夠較快恢復到穩定狀態,表現出比傳統PID控制器更強的抗干擾能力。
另一個研究方向是應用新的算法對模型預測控制進行改進。李明河等[31]采用Levenberg-Marquardt算法(LM算法)對BP神經網絡進行改進,開發出基于LM算法的神經網絡預測控制。與PID控制和模型預測控制相比,神經網絡預測控制對溶解氧的跟蹤控制能力有所增強,抗干擾能力提升。宋翼頡[32]對傳統的預測控制進行了改進,設計出基于最小二乘支持向量機的非線性模型預測控制算法,解決了活性污泥工藝硝態氮控制問題。
模型預測控制需要模型精度可靠,因此,對模型的研究是模型預測控制研究的重要方向。錢湖海[33]基于自組織模糊神經網絡建立預測模型,并運用到非線性模型預測控制中,提出了基于自組織模糊神經網絡的多目標模型預測控制策略。該方法可以有效跟蹤溶解氧和硝態氮,具有非常好的自適應能力和魯棒性。
5 控制系統的比較與評價
研究顯示,前饋控制策略的一大優勢是反應速度快,可以在潛在干擾因素干擾出水水質之前對其進行處理。前饋控制的缺點主要為:(1)需要更多的傳感器;(2)控制機理更復雜;(3)增加了運行管理人員額外的運行管理負擔[16-17]。
理論上講,一個完美的前饋控制系統可以使被控制變量始終保持在設定值上。但是,前饋控制在污水處理廠實際工程項目中應用較少,主要的技術限制在于工藝過程和控制器的復雜性[34],增加控制結構和算法的復雜性會增加操作者的負擔[35],同時,前饋控制需要額外的在線監控器[14],存在建模難度較大等技術問題。由于以上種種限制,前饋控制目前達不到理想的效果,實際應用中普遍將前饋控制與反饋控制結合使用。
與前饋控制相比,反饋控制的優勢為:(1)需要更少的傳感器;(2)不需要開發過程模型;(3)反饋控制更穩定。反饋控制存在的缺點非常明顯,在控制行動開始之前干擾一定存在,由于傳感器反應時間長,控制行為反應慢,在停留時間短的系統中可能無法及時應對突然的干擾[16-17]。近年的研究也將模糊控制方法應用于PID中,調整PID參數使其在每一種工況下達到最優,提高控制精度,增加穩態性能。
模型預測控制是在實踐中發展出的控制方法,主要優點是允許對具有許多強交叉交互的操縱和控制變量的進程進行控制,可以解決各種系統的過程限制。近年來,污水處理工業中模型預測控制的應用有以下難點。
(1)預測控制算法涉及到極大的計算量,污水處理工業是實時快速變化的復雜動態系統,需要性能優異的計算設備。
(2)線性預測控制技術研究較為成熟,但由于非線性模型的建模耗費代價較大,且難以獲得較為精確的模型,非線性預測控制技術的研究尚不成熟,這使得預測控制在污水處理工業中的應用受到限制。
(3)模型預測控制雖然取得豐碩的成果,但理論與實際應用之間存在脫節,預測控制理論未能給實際應用起到指導作用,這也影響了預測控制在污水處理工業的進一步發展。
目前,模型預測控制的研究大多停留在實驗室階段和中試階段。近5年,國內針對模型預測控制的研究主要集中在建立更準確的模型、應用新的算法和將智能控制特別是神經網絡應用在模型預測控制中。對算法的改進和優化、降低計算量是模型預測控制未來的研究重點。應用軟測量對難以實時、精確測量的指標進行預測也出現在近年的研究中[36-38]。
6 總結與展望
近10年,過程控制技術在污水處理中的研究與應用有了一定的進展。多種形式的前饋控制、反饋控制與復合控制已經成功應用于曝氣控制和藥劑投加控制,一定程度上達到了降低運行成本、提高處理效率的目的。人工神經網絡和模糊控制等智能控制技術已廣泛應用于過程控制中。盡管模型預測控制展現出了很好的效果,但是大部分相關工作還停留在計算機模擬和小試、中試試驗階段。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
