雙折射光纖環(huán)鏡應(yīng)變傳感器在線測量方法研究
2020-07-17 03:25:46張曉麗胡興柳
激光技術(shù) 2020年3期
關(guān)鍵詞:測量
江 鶯,段 崢,張曉麗,胡興柳
(1.南京林業(yè)大學(xué)機械電子工程學(xué)院,南京210037;2.信陽師范學(xué)院 物理電子工程學(xué)院,信陽464000;3.金陵科技學(xué)院智能科學(xué)與控制工程學(xué)院,南京211169)
引 言
雙折射光纖環(huán)鏡(birefringence fiber loop mirror,Bi-FLM)除了可以作為可調(diào)諧光濾波器之外[1],其在光纖傳感領(lǐng)域的應(yīng)用也引起了學(xué)者的廣泛關(guān)注[2-3],已成功應(yīng)用于振動[4-5]、應(yīng)變[6]、扭矩[7-8]等測量。Bi-FLM傳感器的測量原理是:外界條件變化使雙折射光纖長度和雙折射率發(fā)生變化,導(dǎo)致相角改變,從而使干涉光譜隨之變化,以實現(xiàn)對外界條件變化的傳感。目前,Bi-FLM傳感器在線測量的方法主要是基于強度解調(diào)原理[9-11],即將Bi-FLM傳感器的光信號強度通過光電轉(zhuǎn)換器轉(zhuǎn)換為電信號,通過監(jiān)測電信號的變化反推光信號的變化,從而反推外界傳感量的變化。由于強度解調(diào)受光源穩(wěn)定性影響較大,因此該方法精度較低。Bi-FLM傳感器離線測量絕大部分采用波長解調(diào),即根據(jù)波長的相對變化量來推算傳感量的大小[12-19]。基于波長解調(diào)的方法,克服了光源穩(wěn)定性的影響,但在測量過程中,由于干涉光譜是周期性信號,需要人為判斷:外界傳感量的變化是導(dǎo)致干涉光譜左移還是右移,是傳感量導(dǎo)致的較小相角變化產(chǎn)生的干涉光譜,還是傳感量導(dǎo)致的更大的周期相角變化產(chǎn)生的周而復(fù)始的干涉光譜,且在測試過程中,外界干擾容易改變干涉光譜的初始相角,導(dǎo)致干涉光譜平移。基于波長解調(diào)的方法無法區(qū)分是:干擾還是外界傳感量的變化導(dǎo)致的干涉光譜變化,致使測量精度下降。因此,基于波長解調(diào)的方法無法自動確定傳感量唯一大小,無法實現(xiàn)在線測量,無法區(qū)分是干擾還是外界傳感量的變化導(dǎo)致的干涉光譜變化,且基于波長解調(diào)的方法需要選定監(jiān)測點,通過監(jiān)測點波長的變化反推應(yīng)變的大小,監(jiān)測點不同,同一 Bi-FLM傳感器靈敏度也各不相同[1,12-13,15],不利于傳感器的校準。
本文中理論推導(dǎo)得出基于波長解調(diào)的表達式,可通過干涉光譜任意連續(xù)4個相鄰的波谷波長及其雙折射光纖初始信息計算雙折射光纖所受軸向應(yīng)變。該方法只需找到光譜中的任意連續(xù)4個最小值對應(yīng)的波長,即可求解出應(yīng)變,無需人為判斷和校準,根據(jù)干涉光譜任意4個相鄰波谷波長相對位置蘊含著應(yīng)變信息的特點,區(qū)分是干擾改變初始相角還是外界傳感量改變應(yīng)變導(dǎo)致的干涉光譜變化。該方法有助于促進傳感器與計算機有效對接,實現(xiàn)在線測量,提高測量精度。
1 理論分析
Bi-FLM傳感器原理圖如圖1所示。入射光從端口1經(jīng)光隔離器進入3dB光纖耦合器,按1∶1分成從端口3順時針和端口4逆時針相向傳輸?shù)膬墒猓詈髤R聚在端口2,由于雙折射光纖具有雙折射效應(yīng),匯聚在端口2的兩束光發(fā)生干涉。當(dāng)雙折射光纖受到應(yīng)變時,導(dǎo)致雙折射光纖雙折射率和雙折射光纖長度發(fā)生變化,從而導(dǎo)致干涉光譜隨之改變,以此實現(xiàn)應(yīng)變測量。
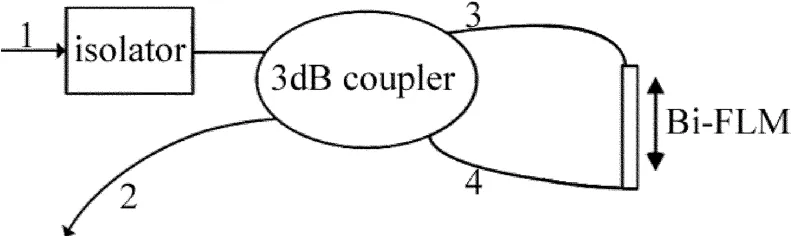
Fig.1 Schematic of Bi-FLM
Bi-FLM傳感器初始干涉光譜表達式為[10]:

式中,λ為干涉光譜波長,T(λ)為干涉光譜強度,相角θ=2πL0B0/λ,L0為光纖初始長度,B0為光纖初始雙折射率。

當(dāng)雙折射光纖受軸向應(yīng)變后,相角變化量 Δθ為[10]:式中,ΔL為雙折射光纖軸向長度變化量,ΔB為光纖雙折射率變化量。
又因ΔB與軸向應(yīng)變成正比[20],即:

式中,εz=ΔL/L0=(L′-L0)/L0,為雙折射光纖軸向應(yīng)變,單位為ε;L′為雙折射光纖受應(yīng)變后的長度;k是雙折射應(yīng)變系數(shù),單位為1/ε,即光纖受1ε后雙折射率變化大小。由(2)式、(3)式可得通過εz表示的Δθ表達式為:

由(2)式、(3)式可得通過 L′表示的 Δθ表達式為:

由(1)式、(4)式可得通過 εz表示的受到軸向應(yīng)變后的Bi-FLM干涉光譜表達式為:
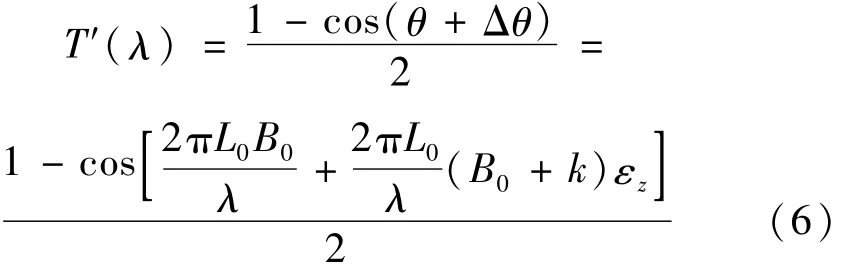
(6)式是通過雙折射光纖所受應(yīng)變εz來描述干涉光譜 T′(λ),與參考文獻[1]、參考文獻[4]、參考文獻[10]中的一致,用于與下面推導(dǎo)的基于波長解調(diào)計算應(yīng)變的理論表達式對比,以校驗本文中推導(dǎo)的表達式正確性。

Fig.2 Birefringence fiber loop mirror sensor wavelength demodulation
由(6)式可知,隨著應(yīng)變的變化,干涉光譜也改變。作者曾通過實驗得到Bi-FLM應(yīng)變傳感器0με時的波形,如圖 2中實線所示[20],當(dāng)傳感光纖產(chǎn)生100με時,波形如圖2中虛線所示。基于傳統(tǒng)波長解調(diào)的方法,無法自動確定A點是左移到B點,還是右移到C點,在人工測量時,可以根據(jù)經(jīng)驗或人為判斷確定。根據(jù)(4)式,當(dāng)相角變化Δθ超過2π時,信號周而復(fù)始,若實施計算機在線實時測量,則無從判斷圖中虛線是100με導(dǎo)致的相角變化Δθ產(chǎn)生的干涉光譜,還是更大的應(yīng)變導(dǎo)致的相角變化2nπ+Δθ產(chǎn)生的干涉光譜(n為整數(shù))。根據(jù)(6)式,干擾能改變初始相角θ導(dǎo)致干涉光譜平移,傳統(tǒng)波長解調(diào)的方法無法區(qū)分是干擾改變初始相角還是外界傳感量改變應(yīng)變導(dǎo)致的干涉光譜變化。因此,基于傳統(tǒng)波長解調(diào)的方法無法自動確定應(yīng)變唯一大小,無法實現(xiàn)在線測量,容易受到外界干擾。以下推導(dǎo)基于波長解調(diào)計算應(yīng)變的理論表達式,能根據(jù)干涉光譜任意4個相鄰波谷波長相對位置蘊含著應(yīng)變信息計算應(yīng)變,無需人為判斷,剔除了外界干擾,提高了測量精度。
由(1)式、(5)式可得通過 L′表示的受到軸向應(yīng)變后的干涉光譜表達式為:

欲使(7)式對應(yīng)干涉光譜T′(λ)的值最小,則:

式中,n為整數(shù),λn為整數(shù)n對應(yīng)的波谷波長,其它依此類推。由(8)式解出:

由(9)式可得:

由(10)式可得:

同理可得:

由(11)式、(12)式可解出:

由(12)式、(13)式可得:
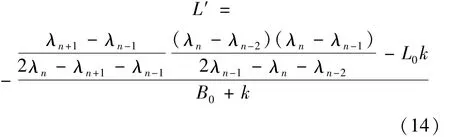
由(14)式可知,雙折射光纖受軸向應(yīng)變后的絕對長度 L′可以由任意 λn+1,λn,λn-1,λn-2這 4個相鄰的波谷波長、光纖初始長度L0、光纖初始雙折射率B0和雙折射應(yīng)變系數(shù)k求出。將L′,L0代入εz=ΔL/L0=(L′-L0)/L0,可求出雙折射光纖所受應(yīng)變大小。也可以選擇選擇4個相鄰的波峰波長計算應(yīng)變,其理論推導(dǎo)過程與上面類似,不再贅述。
2 分析與討論
為了驗證(14)式的正確性,根據(jù)(6)式可得Bi-FLM應(yīng)變傳感器干涉波形,并通過編程找出干涉波形4個相鄰波谷波長,將4個相鄰波谷波長代入(14)式計算絕對長度L′,從而計算應(yīng)變。選取2組不同波長范圍的4個相鄰波谷波長,兩次計算的應(yīng)變均與給定應(yīng)變基本吻合。詳細計算過程如下。
雙折射光纖長度L0=0.2m,雙折射率B0=2.6×10-4,雙折射應(yīng)變系數(shù)k=7.3×0.001/ε,選取波長范圍為典型通訊波長1550nm附近,橫坐標λ的步長增量設(shè)置為0.0001nm,(6)式是描述干涉光譜 T′(λ)與應(yīng)變εz的關(guān)系表達式,根據(jù)(6)式可得各應(yīng)變對應(yīng)的干涉光譜 T′(λ)。εz=0με和 εz=200με時的干涉光譜如圖3所示。當(dāng) εz為確定值時,干涉光譜強度T′(λ)是隨λ變化的余弦函數(shù),無量綱。

Fig.3 Birefringence fiber loop mirror sensor interference spectrum near 1550nm
當(dāng)傳感光纖產(chǎn)生200με時,傳統(tǒng)的基于波長解調(diào)的方法需要選定監(jiān)測點,通過監(jiān)測點波長的變化反推應(yīng)變的大小。例如選擇干涉光譜圖3a中的波谷λn為監(jiān)測點,需要人為判斷圖3a中的波谷λn是左移到圖3b中的λn+1的位置,還是右移到圖3b中的 λn的位置,不利于實現(xiàn)計算機在線測量。且選擇的監(jiān)測點不同,同一Bi-FLM傳感器靈敏度也各不相同,不利于傳感器的校準。本文中推導(dǎo)的理論表達式只需要找出干涉光譜的任意 λn+1,λn,λn-1,λn-2,4個相鄰的波谷波長,便可計算傳感器應(yīng)變大小。
根據(jù)(9)式,當(dāng)n值減小時,對應(yīng)波谷波長增大,故λn+1<λn<λn-1<λn-2,如圖3所示。找出圖中干涉光譜的4個連續(xù)波谷的坐標,εz=200με時,4個連續(xù)波谷波長 λn+1,λn,λn-1,λn-2依次為 1494.3543nm,1538.3059nm,1584.9212nm,1634.4500nm,將 4個連續(xù)波谷波長、光纖初始長度L0=0.2m、光纖初始雙折射率B0=2.6×10-4和雙折射應(yīng)變系數(shù)k=7.3×0.001/ε代入(14)式,計算可得雙折射光纖的絕對長度L′=0.200039978870329m,將L′代入 εz=ΔL/L0=(L′-L0)/L0,計算得應(yīng)變 εz=199.894351642776με。其它應(yīng)變的計算以此類推,表1中為計算結(jié)果。
從表1可以看出,通過本文中推導(dǎo)的理論表達式計算的應(yīng)變與給定應(yīng)變基本吻合,但仍存在一定誤差,誤差是由于(6)式繪制的Bi-FLM干涉光譜波形橫坐標λ的步長增量設(shè)置為0.0001nm,而非連續(xù)步長,導(dǎo)致圖3中某些波谷的縱坐標不完全等于0,而是近似為0,該點不是嚴格意義上的波谷點,因此計算的4個連續(xù)波谷波長 λn+1,λn,λn-1,λn-2也是近似接近理論值,從而與給定應(yīng)變存在一定誤差。
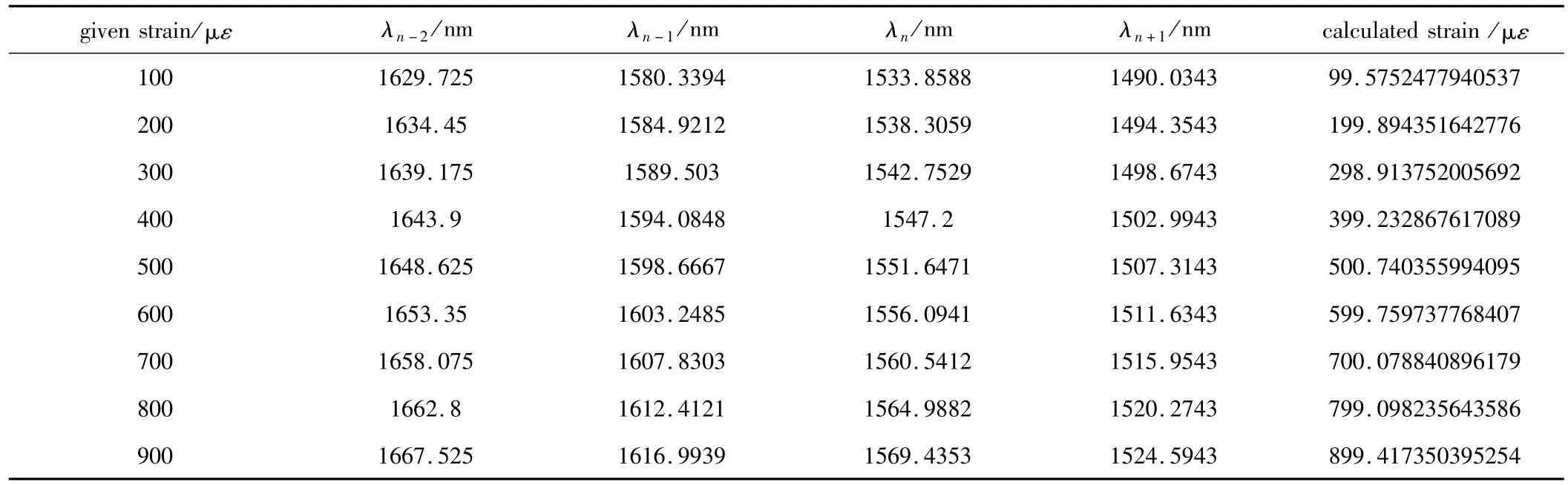
Table 1 Calculating strain results by four adjacentwave valley wavelengths near 1550nm
為了驗證(14)式計算應(yīng)變大小可以由任意λn+1,λn,λn-1,λn-2這4個相鄰的波谷波長計算得到,本文中選取另一典型通訊波長1300nm附近的4個相鄰波谷波長進行計算,εz=200με時的干涉光譜如圖4所示,計算方法同上。各應(yīng)變計算結(jié)果如表2所示。雖然選取的4個相鄰的波谷波長與表1不同,但計算的應(yīng)變與給定應(yīng)變?nèi)曰疚呛希虼耍冢?4)式計算應(yīng)變大小可以由任意4個相鄰波谷波長 λn+1,λn,λn-1,λn-2進行計算。
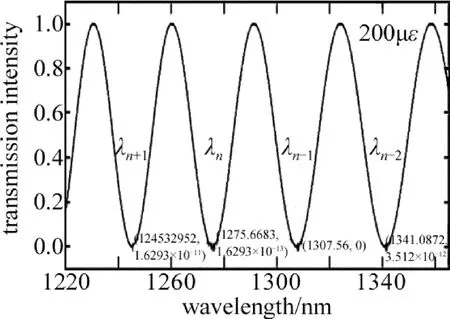
Fig.4 Birefringence fiber loop mirror sensor interference spectrum near 1300nm
根據(jù)表2中計算的各應(yīng)變對應(yīng)的波谷波長λn+1,λn,λn-1,λn-2,傳統(tǒng)的基于波長解調(diào)的方法分別選定波長極小值λn+1和波長極大值λn-2為監(jiān)測點,得到的應(yīng)變與波長擬合直線如圖5所示。以λn+1,λn-2為監(jiān)測點的傳感器靈敏度分別0.036nm/με,0.03877nm/με。選定的監(jiān)測點不同,Bi-FLM傳感器的靈敏度也不同,導(dǎo)致同一傳感器靈敏度大小不一致,不利于傳感器的校準。本文中推導(dǎo)的理論表達式任意選定的4個相鄰的波谷波長 λn+1,λn,λn-1,λn-2不影響計算應(yīng)變的大小,無需校準。計算應(yīng)變時無需人為判斷,有助于實現(xiàn)計算機在線測量。干擾只是改變初始相角導(dǎo)致干涉光譜簡單平移,但外界傳感量改變應(yīng)變,導(dǎo)致干涉光譜任意4個相鄰波谷波長的相對位置發(fā)生變化,并以此計算應(yīng)變,能剔除外界干擾,提高測量精度。
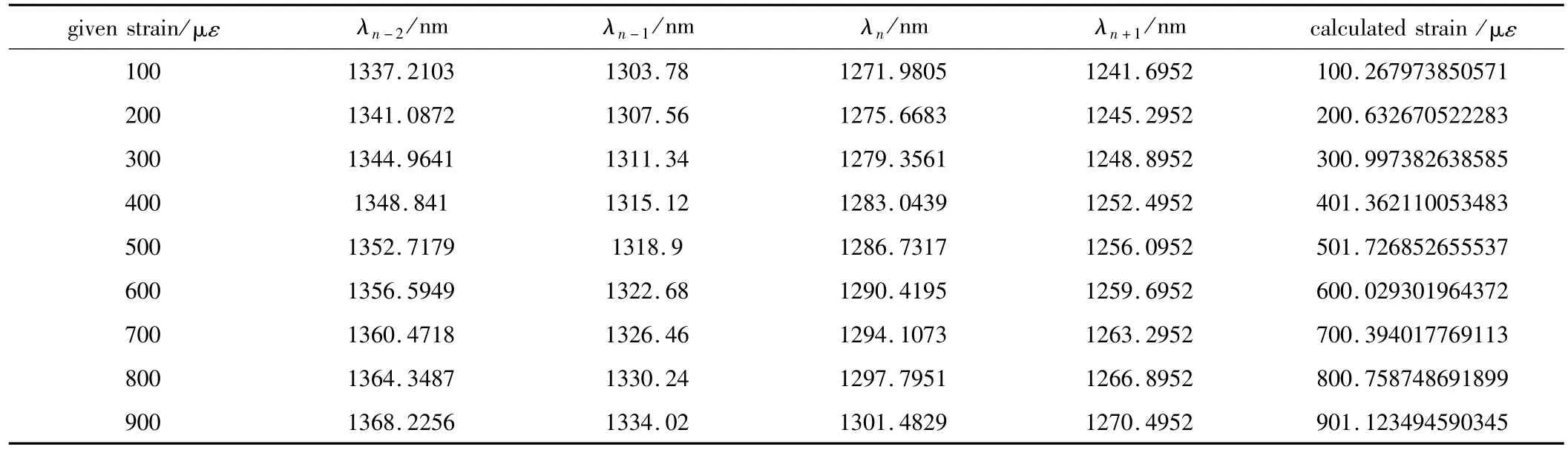
Table2 Calculating strain results by four adjacentwave valley wavelengths near 1300nm

Fig.5 Relationship between strain and wavelength
3 結(jié) 論
本文中選取了典型通訊波長1550nm和1310nm附近4個相鄰的波谷波長,通過本文中推導(dǎo)的理論表達式計算Bi-FLM傳感器受軸向應(yīng)變后的雙折射光纖絕對長度,并以此計算所受應(yīng)變大小。通過兩種不同波長范圍計算的傳感器應(yīng)變大小一致,克服了傳統(tǒng)的基于波長解調(diào)方法因監(jiān)測點不同導(dǎo)致同一傳感器靈敏度各異、不利于傳感器校準的缺點。計算應(yīng)變時無需人為判斷,克服了傳統(tǒng)的基于波長解調(diào)方法無法自動確定傳感量唯一大小、不利于計算機在線測量的缺點。根據(jù)干涉光譜任意4個相鄰波谷波長相對位置蘊含著應(yīng)變信息,能區(qū)分是干擾改變初始相角還是外界傳感量改變應(yīng)變導(dǎo)致的干涉光譜變化,能剔除外界干擾,提高測量精度。本文中研究結(jié)果對Bi-FLM應(yīng)變、振動等各類傳感器實現(xiàn)計算機在線測量,提高測量精度具有指導(dǎo)意義。但本文中的測量方法需要連續(xù)4個相鄰的波谷波長,需要的信息量較多,在一定的光源波長范圍內(nèi),僅有較短的傳感光纖的雙折射光纖環(huán)鏡傳感器沒有足夠的波谷點,因此,有待進一步研究一種需要信息量較少的在線測量方法。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00