
煤礦井下轉(zhuǎn)載機(jī)監(jiān)測(cè)終端的研制
2020-07-27 09:48:02任賀賀
煤礦安全 2020年7期
孫 磊,任賀賀
(1.中國(guó)礦業(yè)大學(xué) 網(wǎng)絡(luò)與信息中心,江蘇 徐州221000;2.兗礦集團(tuán)有限公司 山東煤炭技術(shù)研究所,山東 濟(jì)南250000)
近年,煤礦井下的安全監(jiān)測(cè)問(wèn)題受到越來(lái)越多的關(guān)注。劉明智[1]等研制了煤礦井下氣體束管管路故障監(jiān)測(cè)裝置并設(shè)計(jì)了系統(tǒng)標(biāo)定的方法,確保了束管管路故障及時(shí)有效排除。劉偉[2]開發(fā)的煤礦機(jī)電設(shè)備震動(dòng)監(jiān)測(cè)系統(tǒng),能夠采集煤礦井下設(shè)備震動(dòng)信號(hào),實(shí)現(xiàn)了對(duì)設(shè)備故障的早期診斷,降低了危險(xiǎn)事故發(fā)生的概率。趙晨光[3]設(shè)計(jì)的刮板輸送機(jī)監(jiān)測(cè)系統(tǒng),實(shí)現(xiàn)了對(duì)井下物料傳輸設(shè)備的遠(yuǎn)程實(shí)時(shí)監(jiān)測(cè)。
井下轉(zhuǎn)載機(jī)是煤礦井下作業(yè)的必須設(shè)備。在井下作業(yè)的過(guò)程中,工作在轉(zhuǎn)載機(jī)周圍的人員存在不慎跌入機(jī)器中的隱患。如果未能監(jiān)測(cè)到這種事故,并做出及時(shí)的響應(yīng),將造成不可挽回的損失。鑒于此,采用處理器技術(shù)、射頻傳感技術(shù)、傳感器網(wǎng)絡(luò)與軟件工程技術(shù)[4-7],構(gòu)建煤礦井下監(jiān)測(cè)系統(tǒng),并研制轉(zhuǎn)載機(jī)監(jiān)測(cè)與控制終端。終端能實(shí)現(xiàn)對(duì)轉(zhuǎn)載機(jī)裝狀態(tài)的實(shí)時(shí)監(jiān)測(cè),對(duì)轉(zhuǎn)載機(jī)出現(xiàn)異常時(shí)進(jìn)行斷電控制。
1 監(jiān)測(cè)終端硬件
1.1 煤礦井下傳感器網(wǎng)絡(luò)
煤礦井下傳感器網(wǎng)絡(luò)如圖1,該網(wǎng)絡(luò)由監(jiān)測(cè)終端、路由器節(jié)點(diǎn)、中繼器節(jié)點(diǎn)、交換機(jī)節(jié)點(diǎn)以及井上局域網(wǎng)絡(luò)構(gòu)成。監(jiān)測(cè)終端被安裝在轉(zhuǎn)載機(jī)的入口處,當(dāng)攜帶電子標(biāo)簽的井下作業(yè)人員不慎跌入轉(zhuǎn)載機(jī)時(shí),監(jiān)測(cè)終端上的射頻模塊能夠監(jiān)測(cè)到電子標(biāo)簽,從而控制電控箱切斷轉(zhuǎn)載機(jī)的電源并控制警笛與預(yù)警燈發(fā)出預(yù)警信號(hào),同時(shí)通過(guò)傳感器網(wǎng)絡(luò)將井下突發(fā)狀況反饋到遠(yuǎn)程監(jiān)控端,以便采取應(yīng)對(duì)措施。在正常的工作狀態(tài)下,監(jiān)測(cè)終端能夠?qū)D(zhuǎn)載機(jī)危險(xiǎn)區(qū)域進(jìn)行實(shí)時(shí)的監(jiān)測(cè),并利用井下傳感器網(wǎng)絡(luò)將采集到的信息轉(zhuǎn)發(fā)到井上遠(yuǎn)程監(jiān)控端。

圖1 煤礦井下傳感器網(wǎng)絡(luò)Fig.1 Sensor network of underground coal mine
1.2 監(jiān)測(cè)終端整體功能
監(jiān)測(cè)終端的硬件由STM32WB55 主處理器及其驅(qū)動(dòng)電路、電源管理部分、射頻識(shí)別模塊、串口通信電路、以太網(wǎng)接口、繼電器模塊與功能按鍵部分構(gòu)成。監(jiān)測(cè)終端硬件功能框圖如圖2,STM32WB55 主處理器是監(jiān)測(cè)終端的控制中心,負(fù)責(zé)整個(gè)系統(tǒng)的調(diào)度;射頻天線、THM3060 射頻識(shí)別芯片與串口通信電路的組合實(shí)現(xiàn)了實(shí)時(shí)監(jiān)測(cè)轉(zhuǎn)載機(jī)入口處的危險(xiǎn)區(qū)域,并能在異常發(fā)生時(shí)將該信息轉(zhuǎn)發(fā)到監(jiān)測(cè)終端;以太網(wǎng)接口由RJ45 端口與ENC28J60 芯片及其驅(qū)動(dòng)電路組成,能將監(jiān)測(cè)終端的數(shù)據(jù)轉(zhuǎn)發(fā)到井下傳感器網(wǎng)路,是監(jiān)測(cè)終端與井下傳感器網(wǎng)絡(luò)連接的媒介;電源管理芯片為監(jiān)測(cè)終端提供工作電壓,功能按鍵是監(jiān)測(cè)終端其它功能的拓展;繼電器模塊能夠?qū)崿F(xiàn)對(duì)警笛、預(yù)警燈與轉(zhuǎn)載機(jī)電控箱的控制,它與主處理器之間通過(guò)MAX485 協(xié)議實(shí)現(xiàn)數(shù)據(jù)通信。

圖2 監(jiān)測(cè)終端硬件功能框圖Fig.2 Monitoring terminal hardware function block diagram
1.3 主處理器及外圍驅(qū)動(dòng)電路
監(jiān)測(cè)終端的主處理器為STM32WB55CCU6,該芯片內(nèi)嵌應(yīng)用處理器和網(wǎng)絡(luò)處理器,在網(wǎng)絡(luò)信號(hào)處理方面性能更優(yōu)。同時(shí),STM32WB55CCU6 基于低功耗的STM32L4 芯片,功耗進(jìn)一步被降低[8-10]。其外圍電路主要包括:復(fù)位電路、在線編程電路、功能按鍵電路等。主處理器電路是監(jiān)測(cè)終端的控制中樞,監(jiān)測(cè)終端按照內(nèi)置軟件系統(tǒng)的設(shè)定有條不紊地執(zhí)行各項(xiàng)任務(wù)。
1.4 電壓轉(zhuǎn)換電路
監(jiān)測(cè)終端利用了2 塊電壓轉(zhuǎn)換芯片,分別是AMS1117-5V 與AMS1117-3.3V。這2 塊芯片能為監(jiān)測(cè)終端上提供5 V 和3.3 V 的工作電壓[11-13]。AMS1117-5V 電壓轉(zhuǎn)換電路的輸出是AMS1117-3.3V 電壓轉(zhuǎn)換電路的輸入,AMS1117-5V 電壓轉(zhuǎn)換電路的輸入是12 V 的直流信號(hào)。5 V 輸出電壓為MAX485ESA 等芯片提供工作電壓,3.3 V 輸出電壓為STM32WB55CCU6、THM3060、ENC28J60 等芯片提供工作電壓。5 V 與3.3 V 電壓作為信號(hào)源也能夠?yàn)楸O(jiān)測(cè)終端上的三極管電路、芯片驅(qū)動(dòng)電路等提供邏輯信號(hào)。電壓轉(zhuǎn)換電路如圖3。

圖3 AMS1117 電壓轉(zhuǎn)換電路圖Fig.3 AMS1117 voltage conversion circuit diagram
1.5 RS-485 通信電路
為了控制監(jiān)測(cè)終端上繼電器,進(jìn)而實(shí)現(xiàn)對(duì)警笛、預(yù)警燈以及轉(zhuǎn)載機(jī)電控箱的控制,設(shè)計(jì)并實(shí)現(xiàn)了RS-485 通信電路。MAX485ESA 驅(qū)動(dòng)電路圖如圖4,MAX485ESA 芯片為RS-485 協(xié)議數(shù)據(jù)轉(zhuǎn)換芯片,其驅(qū)動(dòng)電路由電阻R10、R11、R13、R14、R15,電容C10以及三極管PMBT3904 組成。RS-485 協(xié)議為通用的工業(yè)總線協(xié)議,在此基礎(chǔ)上,根據(jù)實(shí)際應(yīng)用需求,設(shè)計(jì)監(jiān)測(cè)終端的通信協(xié)議。此外,RS-485 協(xié)議具有抗干擾能力強(qiáng)、誤碼率低的特點(diǎn)[14-15]。
1.6 射頻識(shí)別模塊電路
THM3060 是監(jiān)測(cè)終端上實(shí)現(xiàn)射頻識(shí)別功能的芯片,THM3060 射頻芯片電路圖如圖5。

圖4 MAX485ESA 驅(qū)動(dòng)電路圖Fig.4 MAX485ESA driver circuit diagram
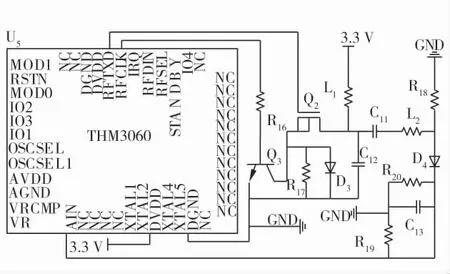
圖5 THM3060 射頻芯片電路圖Fig.5 THM3060 radio frequency chip circuit diagram
THM3060 內(nèi)置接收放大和數(shù)字解調(diào)電路、時(shí)鐘電路、復(fù)位電路[16-18]。THM3060 的外圍電路由電阻R16、R17、R18、R19、R20,電容C11、C12、C13,電感L1、L2,二極管D3、D4以及三極管Q3等構(gòu)成。THM3060 與主處理器間的通信方式為串口協(xié)議,根據(jù)射頻信號(hào)的特點(diǎn),設(shè)計(jì)通信協(xié)議。在射頻芯片的基礎(chǔ)上,監(jiān)測(cè)終端能夠監(jiān)測(cè)到是否有作業(yè)人員跌入了轉(zhuǎn)載機(jī)的入口處。
1.7 以太網(wǎng)數(shù)據(jù)傳輸模塊
監(jiān)測(cè)終端網(wǎng)絡(luò)傳輸芯片是 ENC28J60,ENC28J60 網(wǎng)絡(luò)芯片及驅(qū)動(dòng)電路圖如圖6,ENC28J60的外圍驅(qū)動(dòng)電路由晶振X1,電阻R21、R22、R23、R24、R25,電容C13、C14、C15等組成。指示燈LEDA 與LEDB可以表示網(wǎng)絡(luò)芯片的工作狀態(tài)。ENC28J60 網(wǎng)絡(luò)芯片能夠?qū)⒈O(jiān)測(cè)終端采集到的信息轉(zhuǎn)發(fā)到井下傳感器網(wǎng)絡(luò),進(jìn)而傳輸?shù)骄媳O(jiān)控終端,同時(shí)將來(lái)自井上監(jiān)控端的信號(hào)下達(dá)給監(jiān)測(cè)終端。監(jiān)測(cè)終端上的以太網(wǎng)數(shù)據(jù)傳輸模塊是連接無(wú)線傳感器網(wǎng)絡(luò)與各監(jiān)測(cè)終端的數(shù)據(jù)通道。
2 監(jiān)測(cè)終端軟件系統(tǒng)

圖6 ENC28J60 網(wǎng)絡(luò)芯片電路圖Fig.6 ENC28J60 network chip circuit diagram
采用C 語(yǔ)言開發(fā)監(jiān)測(cè)終端的軟件系統(tǒng),集成開發(fā)環(huán)境為keil5。將UCOS 操作系統(tǒng)移植到主處理器STM32WB55CCU6,在UCOS 系統(tǒng)框架中,開發(fā)監(jiān)測(cè)終端的應(yīng)用系統(tǒng)。監(jiān)測(cè)終端集成了以太網(wǎng)數(shù)據(jù)傳輸協(xié)議、射頻數(shù)據(jù)傳輸協(xié)議與RS-485 通信協(xié)議。監(jiān)測(cè)終端具體工作流程如圖7。

圖7 監(jiān)測(cè)終端軟件工作流程圖Fig.7 Monitoring terminal software work flow chart
在為監(jiān)測(cè)終端供電后,執(zhí)行UCOS 操作系統(tǒng)初始化程序;執(zhí)行主處理器、射頻模塊、網(wǎng)絡(luò)模塊等初始化程序;然后,主處理器檢測(cè)以太網(wǎng)模塊連接狀態(tài)是否就緒;接著,射頻模塊開始工作對(duì)轉(zhuǎn)載機(jī)入口進(jìn)行實(shí)時(shí)掃描監(jiān)測(cè);當(dāng)監(jiān)測(cè)到作業(yè)人員身上攜帶的電子標(biāo)簽時(shí),就認(rèn)為現(xiàn)場(chǎng)有作業(yè)人員不慎跌入轉(zhuǎn)載機(jī)。此時(shí),監(jiān)測(cè)終端控制電控箱將轉(zhuǎn)載機(jī)電源切斷,并釋放預(yù)警信號(hào)。與此同時(shí),監(jiān)測(cè)終端也會(huì)將預(yù)警信息及相關(guān)數(shù)據(jù)打包,通過(guò)井下傳感器網(wǎng)絡(luò)轉(zhuǎn)發(fā)到井上監(jiān)控中心。為了降低監(jiān)測(cè)終端功耗,在沒(méi)有按鍵或者事件觸發(fā)時(shí),監(jiān)測(cè)終端進(jìn)入休眠狀態(tài)。
3 系統(tǒng)測(cè)試
首先進(jìn)行了網(wǎng)絡(luò)節(jié)點(diǎn)間距離與丟包率關(guān)系的測(cè)試,包括:監(jiān)測(cè)終端與路由器間、路由器與中繼器間、中繼器與交換機(jī)間。在煤礦井下實(shí)際的環(huán)境中,進(jìn)行監(jiān)測(cè)終端與路由器節(jié)點(diǎn)間距離與丟包率關(guān)系的測(cè)試,固定路由器,路由器通過(guò)網(wǎng)口與筆記本連接,監(jiān)測(cè)終端放置在不同的距離上,監(jiān)測(cè)終端向路由器發(fā)送500 個(gè)數(shù)據(jù)包,路由器收到監(jiān)測(cè)終端發(fā)送來(lái)的數(shù)據(jù)后通過(guò)串口調(diào)試助手進(jìn)行統(tǒng)計(jì),并顯示收到的數(shù)據(jù)個(gè)數(shù)。同時(shí)記錄2 個(gè)節(jié)點(diǎn)之間的距離并記錄下來(lái),每個(gè)定點(diǎn)測(cè)量距離通過(guò)3 次試驗(yàn)取平均值,得到路由器接收到的數(shù)據(jù)個(gè)數(shù)。采用相同的方式測(cè)試了另外2 類節(jié)點(diǎn)間距離與丟包率的關(guān)系。把所有的數(shù)據(jù)匯總后得到了網(wǎng)絡(luò)傳輸節(jié)點(diǎn)間距離與丟包率關(guān)系(圖略)為:當(dāng)2 個(gè)節(jié)點(diǎn)間距離在70 m 范圍內(nèi)時(shí),丟包率較低;在70~90 m 之間時(shí),丟包率有所上升,在90 m 范圍內(nèi)時(shí),丟包率依然保持在可容忍的范圍內(nèi),增加必要的確認(rèn)重傳機(jī)制,可以保障節(jié)點(diǎn)間的可靠通信。
此外,經(jīng)過(guò)多次試驗(yàn),預(yù)警信號(hào)從監(jiān)測(cè)終端傳輸?shù)骄媳O(jiān)控端的時(shí)間在5 s 之內(nèi),在井下傳感器網(wǎng)絡(luò)正常工作的情況下,這保證了井上監(jiān)測(cè)人員能在5 s 內(nèi)響應(yīng)轉(zhuǎn)載機(jī)造成的事故。
4 結(jié) 論
研制了煤礦井下轉(zhuǎn)載機(jī)入口監(jiān)測(cè)終端,采用STM32WB55 芯片作為終端的主處理器,硬件上實(shí)現(xiàn)了主處理器及其外圍驅(qū)動(dòng)電路、電壓轉(zhuǎn)換電路、RS-485 通信電路、射頻識(shí)別模塊電路、以太網(wǎng)數(shù)據(jù)傳輸模塊電路等;終端的軟件實(shí)現(xiàn)了射頻信號(hào)的采集與處理功能、網(wǎng)絡(luò)的初始化與數(shù)據(jù)傳輸功能、設(shè)備的狀態(tài)控制功能以及其它相關(guān)業(yè)務(wù)功能。
