
基于UWB 的礦井機車測速系統
2020-07-27 09:48:02劉世森
煤礦安全 2020年7期
關鍵詞:信號
劉世森
(1.中煤科工集團重慶研究院有限公司,重慶400039;2.瓦斯災害監控與應急技術國家重點實驗室,重慶400037)
《煤礦安全規程》(2016 年修訂版)第392 條規定:采用無軌膠輪車運輸時,運行中應當符合下列要求:運行速度,運人時不超過25 km/h,運送物料時不超過40 km/h。《金屬非金屬地下礦山無軌運人車安全技術要求》2017 年的征求意見稿中明確提出行駛速度不得超過30 km/h。學者根據公開的論文報道2013—2017 年期間在全國煤礦共發生各類生產事故死亡事故1945 起[2],交通運輸死亡事故409起,僅次于頂板事故,位居第2 位。相關學者對礦井機車測速方法進行許多研究[3-7],通過合理的控制車速可以有效的較少和預防交通運輸事故。礦井無線實時定位技術是國內外研究熱點,UWB 技術具有定位精度高、抗干擾和抗多徑能力強[8-9],為此提出一種基于UWB 的礦井機車測速系統設計方案,對礦井機車進行精準定位和準確測速,能夠提高執法依據。
1 系統架構
基于UWB 的礦井機車測速系統主要由車載卡、本安型讀卡器、電源、工業環網平臺和服務器等組成。本安型讀卡器通過光纖或者網線就近接入交換機,再通過光纖向下傳輸,本安型讀卡器之間通過光纖或網線相連。在巷道方向沿車輛行進方向間隔一定距離安裝本安型讀卡器,當安裝在車輛上的車載卡進入到本安型讀卡器無線覆蓋范圍內時,采用UWB 方式與本安型讀卡器進行無線交互,并實時上傳至服務器,服務器根據收到的信息計算出車輛的平均速度,最終在web 終端進行顯示。
2 定位原理
UWB 技術是一種基于脈沖的技術,其脈沖小于1 ns,測距精度可達亞米級,具備發射功率低、抗干擾性強等優點。UWB 精確定位方式主要有到達時間法(TOA)和時間差定位法(TDOA)[10-11]。研究以TOA方法為基礎的TWR 單程測距方法。
礦井機車測速是基于車輛定位設計的,針對礦井一維線性空間,本安型讀卡器采用雙射頻UWB模塊設計,同時設置測距模塊和偵聽模塊,即可完成讀卡器兩側待定位目標的定位和定向,本安型讀卡器定位原理圖如圖1,讀卡器包括測距模塊、偵聽模塊、射頻天線、時鐘單元、網絡模塊及微控制器模塊。測距模塊用于與車載卡進行無線交互并記錄信號發送和接收時間戳,偵聽模塊用于接收信號并記錄無線信號交互過程中的信號到達時間戳,網絡模塊用于讀卡器之間或與交換機的通信連接。定位工作時序圖如圖2。
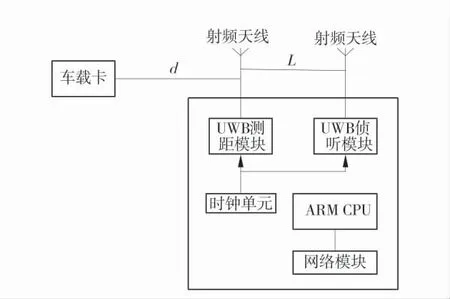
圖1 本安型讀卡器定位原理圖Fig.1 Positioning schematic of intrinsically safe card reader module
定位工作時序其步驟如下:①由車載卡X 發起廣播請求信號,并記錄測距請求信號發送時間戳tXB,發送到UWB 偵聽模塊A 和UWB 測距模塊B;②UWB 測距模塊B 與UWB 偵聽模塊A 收到車載卡X 的信號后,測距模塊B 和偵聽模塊A 分別記錄測距請求接受信號時間戳rB和rA;③測距模塊B 發送測距應答信號到車載卡X 與偵聽模塊A,測距應答信號為廣播包,并記錄發送時間戳tB;④偵聽模塊A 接收到測距應答信號可以獲得時間戳信息rAB,車載卡X 收到信號后,記錄測距應答信號時間戳rXB。車載卡X 到UWB 測距模塊B 的距離d 為:
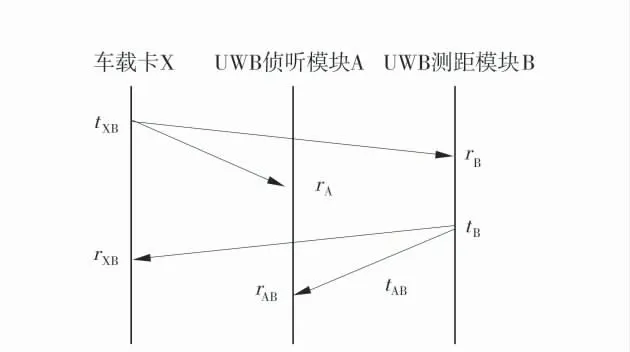
圖2 定位工作時序圖Fig.1 The diagram of positioning sequence

式中:c 為電磁波在介質中的傳播速度,一般以真空中的光速來代替。
在獲取了車載卡的距離信息之后,仍然無法確定車載卡在一維線性巷道環境中的絕對位置,車載卡判定方向過程如下。
由于偵聽模塊A 和測距模塊B 之間的距離L為恒定值,則有:

若車載卡在本安型讀卡器的左側,有:

將式(2)代入到式(3)中,當車載卡在本安型讀卡器的左側時有:

若車載卡在本安型讀卡器的右側,有:

將式(2)代入到式(5)中,當車載卡在本安型讀卡器的右側時有:

根據式(4)和式(6)可知,通過計算的值,即可完成車載卡方向的判定,結合距離信息d 即實現車載卡的定位。
綜上所述,根據車載卡、測距模塊以及監聽模塊所記錄的時間戳信息,實現了在計算車載卡與讀卡器之間距離的同時也完成對車載卡相對于讀卡器的方向的判斷,結合讀卡器自身的位置信息,可以實現在一維環境下對車載卡的精確位置信息的獲取。根據該定位原理可以同時完成單個讀卡器兩側的定位,且車載卡與讀卡器只需進行單次測距,測距耗時縮短,從而增加車載卡的續航時間,同時也減少了無線信道的占用,增加了系統的容量。
3 測速原理
車輛運行速度:

式中:△t 為車輛運行的時間,s;△d 為在此時間段內車輛運行的實際距離,m。
設車輛在在ti時刻的位置信息為di,其中i=0,1,2,…,n,服務器計算車輛某一瞬時速度vi-1為:

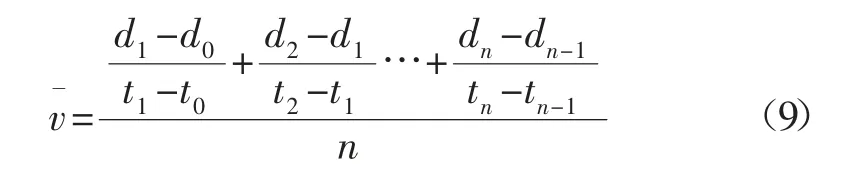
服務器計算某一控制路段的平均速度vˉ為:
4 讀卡器
本安型讀卡器硬件構成框圖如圖3。微控制器選用STM32F407ZGT6,帶有FPU 的32 位Cortex-M4內核微處理器,主頻高度168 MHz,15 個通信接口。DW1000 符合IEEE802.15.4-2011 超寬帶標準,定位精度可達厘米級,支持TOA 測距和TDOA 精確定位[12]。在110 kpbs/s 通訊速率情況下,理想條件下DW1000 最大測距距離為60 m,不符合礦井現場應用需求,故需增加功率放大器,以便增加最大無線覆蓋距離。工業交換機處理器具備3 路光口和2 路網口,可進行讀卡器之間級聯。電源管理模塊負責芯片的供電控制。
讀卡器軟件流程如圖4。讀卡器上電后,首先對CPU 系統和UWB 芯片進行初始化配置,等待車載卡所發送的入網請求幀,當收到車載卡的入網請求幀后,向車載卡回復入網響應幀;當車載卡入網完成后,按照TOA 測距原理完成與偵聽模塊和監聽模塊的無線信息交互;UWB 無線信息交互過程完成后,按照通信協議將定位結果通過光纖傳輸到服務器進行數據處理。

圖3 本安型讀卡器硬件構成框圖Fig.3 Block diagram of the hardware configuration of intrinsically safe card reader

圖4 讀卡器軟件流程圖Fig.4 Software process of the card reader
5 車載卡
車載卡要求使用壽命長,故主控模塊采用ARM低功耗處理器微處理器,采用澆封電池滿足本安電路設計,UWB 射頻模塊參照定位讀卡器硬件進行設計。車載卡硬件主要由以下幾個模塊組成:ARM 低功耗處理器、DW1000 射頻芯片、功放、按鍵、振動傳感器、電源芯片和電池等。
車載卡軟件流程如圖5。車載卡上電后,首先進行初始化配置,然后主動掃描網絡,發送入網請求幀,申請測距時隙,當收到讀卡器回復的入網響應幀后,入網成功,車載卡與讀卡器之間建立起一對一的無線通訊連接,采用TOA 測距方式與讀卡器進行UWB 無線信息交互,直至測距成功;測距成功后,為了節省功耗,車載卡進入掉電模式,等待定時器定時喚醒進行下一輪定位。車載卡如果入網不成功,則直接進入低功耗休眠狀態,周期性進行入網請求,直至入網成功。
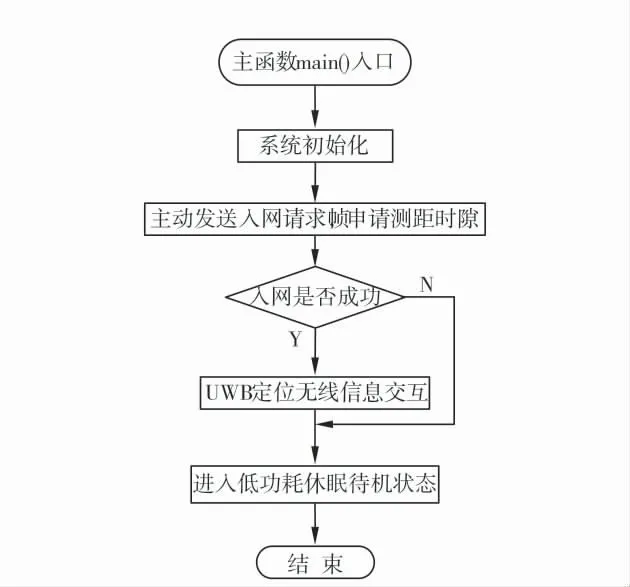
圖5 車載卡軟件流程設計圖Fig.5 Software process of the vehicle card
6 試驗結果
為驗證系統性能,在山東省兗礦集團濟寧三號井搭建測速系統,按照每隔500 m 布置1 臺讀卡器,共布置5 臺讀卡器,車輛攜帶車載卡進行測速測試,分別設定為15、20、25、30、35 km/h,針對不同速度進行8 個來回測試,其中實際車速為車輛儀表盤上顯示的車速,測試實驗的實際車速、測量車速和平均誤差值見表1。由表1 可知本方法測速誤差控制在2%以內,仍然在可以接受的范圍內,滿足巷道環境的車輛測速應用,系統設計合理。
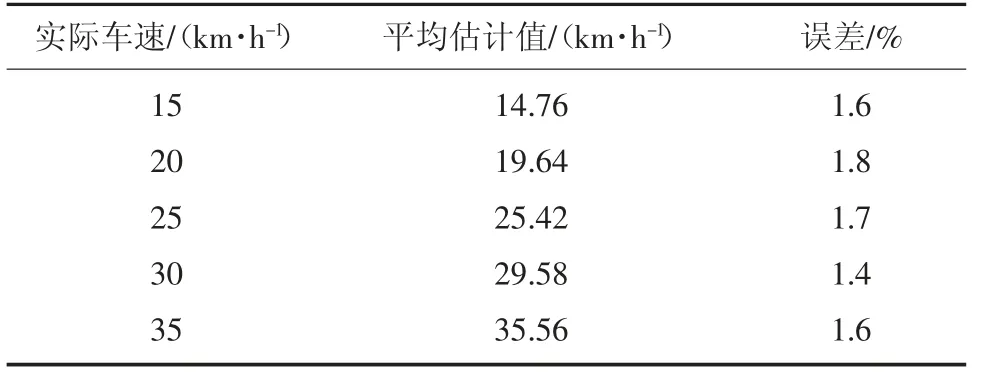
表1 速度平均估計值及誤差Table 1 Average estimated value and error of speed
7 結 語
提出了提出了一種基于UWB 的礦井機車測速系統設計方案。闡述了系統的總體組成架構,設計了適用于礦井一維線性空間的定位方法,讀卡器采用基于TOA 測量方法的雙射頻模塊設計,同時設置測距模塊與監聽模塊以實現對機車的精確定位和方向識別,單次測距時間短,分析了基于無線定位的機車測速原理,詳細介紹了讀卡器和車載卡的硬件、軟件設計,試驗結果表明機車測速誤差控制在2%以內,滿足現場測速應用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
