水上搜救機(jī)器人航跡跟蹤控制器設(shè)計*
2020-07-27 06:45:56肖長詩高欣國文元橋隋忠義向皓聞
關(guān)鍵詞:分配
肖長詩 高欣國 文元橋 周 陽 隋忠義 向皓聞
(武漢理工大學(xué)航運(yùn)學(xué)院1) 武漢 430063) (國家水運(yùn)安全工程技術(shù)研究中心2) 武漢 430063)(內(nèi)河航運(yùn)技術(shù)湖北省重點(diǎn)實驗室3) 武漢 430063) (武漢理工大學(xué)智能交通系統(tǒng)研究中心4) 武漢 430063)
0 引 言
針對某些水域來往船只稀少、氣象和水文環(huán)境復(fù)雜,實施快速人工搜救困難的問題,設(shè)計了一種能水上自主搜救的機(jī)器人模型,機(jī)身采用呈正三角分布的三個浮筒形式,既保障搜救機(jī)器人自身穩(wěn)定性,又可避免搜救過程對落水人員的傷害.該機(jī)器人運(yùn)動靈活,可原地轉(zhuǎn)向;配備三個推進(jìn)器,速度較快;結(jié)構(gòu)簡單,易于回收和維護(hù).
實現(xiàn)機(jī)器人自主搜救首先需要解決航跡跟蹤控制.航跡跟蹤是對規(guī)劃好的路徑進(jìn)行跟蹤,有間接航跡跟蹤和直接航跡跟蹤兩種方式[1].間接航跡跟蹤分為外環(huán)制導(dǎo)環(huán)和內(nèi)環(huán)控制環(huán),直接航跡跟蹤則是將兩個環(huán)節(jié)集成在一起,這種航跡跟蹤通常基于神經(jīng)網(wǎng)絡(luò)等方法實現(xiàn).由于間接航跡跟蹤結(jié)構(gòu)簡單,較容易實現(xiàn),在工程應(yīng)用上較廣泛.而間接航跡跟蹤內(nèi)環(huán)控制方法主要有反步法、內(nèi)模控制、模糊控制和神經(jīng)網(wǎng)絡(luò)等等.反步法和內(nèi)模控制能達(dá)到較好的跟蹤效果,但需要精確的被控對象數(shù)學(xué)模型[2-3].模糊控制和神經(jīng)網(wǎng)絡(luò)不需要精確的被控對象模型,但要求設(shè)計人員具有豐富的知識和實際經(jīng)驗,且航跡跟蹤誤差波動較大[4-5].S面控制方法是模糊思想與PID控制結(jié)構(gòu)的結(jié)合,它具有不依賴精確數(shù)學(xué)模型、適用于非線性控制和便于調(diào)節(jié)參數(shù)等優(yōu)點(diǎn)[6].文獻(xiàn)[7-9]將S面控制方法運(yùn)用于水下機(jī)器人的運(yùn)動控制中,并進(jìn)行了參數(shù)自調(diào)整的優(yōu)化,通過實驗驗證了S面控制器具有既快又穩(wěn)的控制效果.在外環(huán)制導(dǎo)研究中,LOS(line-of-sight)循跡已經(jīng)在輪式機(jī)器人、飛行器和水面船舶上得到了廣泛的應(yīng)用.Fossen等[10]在傳統(tǒng)的LOS制導(dǎo)算法加入積分環(huán)節(jié),消除緩變環(huán)境載荷對船舶位置所產(chǎn)生的橫向偏離.與傳統(tǒng)船舶的路徑跟蹤相比,三推進(jìn)器水上機(jī)器人還需要解決推進(jìn)器布置冗余的分配問題,常規(guī)的偽逆法分配由于沒有考慮推力極限的約束,會造成推力分配過飽和的情況.
本文以三推進(jìn)器水上機(jī)器人為研究對象,對其在航跡跟蹤控制問題進(jìn)行研究.首先,運(yùn)用二次規(guī)劃方法實現(xiàn)推力分配的優(yōu)化;其次,選擇S面控制方法進(jìn)行航向航速控制,在此基礎(chǔ)上加入基于反饋誤差的自適應(yīng)調(diào)整項,提高航向航速控制的準(zhǔn)確性,再結(jié)合改進(jìn)的LOS制導(dǎo)算法設(shè)計內(nèi)外環(huán)分離的航跡跟蹤控制器.最后,通過仿真和水池試驗驗證航跡跟蹤控制器的性能.
1 三推進(jìn)器水上搜救機(jī)器人介紹與數(shù)學(xué)建模
三推進(jìn)器水上機(jī)器人的外形結(jié)構(gòu)見圖1.機(jī)器人由三個圓柱浮體構(gòu)成,浮體下方安裝三個固定方向推進(jìn)器,機(jī)器人運(yùn)動形式類似于輪式機(jī)器人,上方圓臺是控制箱.通過三個推進(jìn)器推力的分配,可實現(xiàn)水上機(jī)器人自轉(zhuǎn)、回旋、跟蹤等多種姿態(tài)控制.

圖1 水上機(jī)器人結(jié)構(gòu)外形圖
三推進(jìn)器水上機(jī)器人的運(yùn)動控制系統(tǒng)框架見圖2,分為控制層、通信層、感知層,以及執(zhí)行層.

圖2 水上搜救機(jī)器人運(yùn)動控制系統(tǒng)框圖


圖3 三推進(jìn)器水上機(jī)器人平面運(yùn)動示意
水上搜救機(jī)器人的運(yùn)動學(xué)模型為

(1)
水上搜救機(jī)器人動力建模的水動力阻力項采用線性形式,即所受阻力與速度呈線性關(guān)系,則機(jī)器人在水平面的水動力方程為

(2)
式中:M為機(jī)器人的慣性質(zhì)量矩陣;C為向心力和科氏力系數(shù)矩陣;D為阻力系數(shù)矩陣;τ為水上機(jī)器人的推力及力矩矩陣.
由于推進(jìn)器的安裝方向為縱向,所以橫向上沒有推力輸出,而式中的系數(shù)則通過實船實驗數(shù)據(jù)辨識得到.因此,水上機(jī)器人的動力學(xué)模型為
(3)
2 航跡跟蹤控制器設(shè)計
將航跡跟蹤控制器設(shè)計分為三部分:航向航速控制器、制導(dǎo)律和推力分配三部分,對于冗余的推力分配問題,運(yùn)用二次規(guī)劃進(jìn)行優(yōu)化;航向航速控制采用改進(jìn)S面控制方法;在航跡跟蹤制導(dǎo)環(huán)節(jié),在LOS制導(dǎo)算法加入時變的前世距離,使得機(jī)器人實際運(yùn)動更加靈活,最后通過仿真和水池實驗驗證控制器的效果.航跡跟蹤控制器的基本框架見圖4.
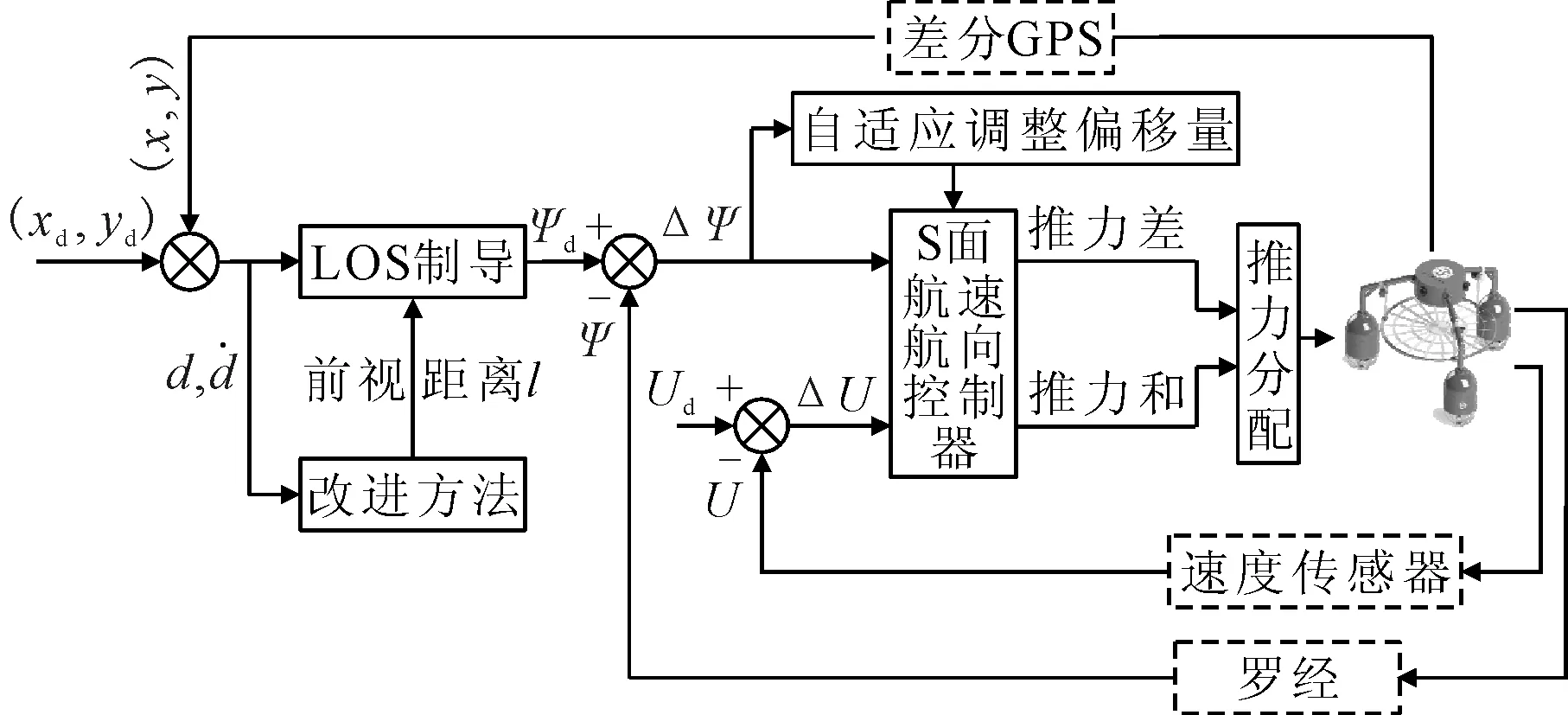
圖4 航跡跟蹤控制器基本框架
2.1 基于二次規(guī)劃的推力分配
三推進(jìn)器水上機(jī)器人的三個方向的合力(矩)向量為
(4)

由于在橫向推力上有三個推進(jìn)器提供動力,屬于冗余推力分配問題,而推進(jìn)器的布置矩陣是一個非滿秩矩陣,無法通過矩陣的逆來進(jìn)行計算.傳統(tǒng)的方法是采用B的偽逆矩陣進(jìn)行推力的分配,而該方法沒有考慮推力幅值的約束因素,容易造成推力分配過飽和現(xiàn)象.因此,本節(jié)利用二次規(guī)劃數(shù)學(xué)優(yōu)化的方法,引入性能指標(biāo)來建立三個推進(jìn)器的推力分配函數(shù):三個推進(jìn)器輸出的合力(矩)與期望的合力(矩)誤差最小化,為
minJ=(Bτ-Td)T(Bτ-Td)
s.t.τmin≤τ≤τmax
(5)
將上式展開
(6)
再令,
(7)

(8)
為驗證基于結(jié)合二次規(guī)劃推力分配的有效性,設(shè)計了同時用二次規(guī)劃方法和偽逆法的對比仿真實驗.仿真參數(shù)見表1.

表1 推力分配參數(shù)表
三推進(jìn)器實際航行中,航向變化較頻繁,而航速改變情況較少,設(shè)定沿縱向方向的推力不變,繞Z軸的合力矩為正弦信號輸入,即Td=[40,0,10+17sin0.25t],具體的仿真圖見圖5.

圖5 推力分配仿真對比效果圖
由推進(jìn)器2的對比效果圖可知,偽逆法求出來的推力超過了推進(jìn)器最大的幅值,基于二次規(guī)劃方法的推力分配解決了偽逆法存在的不足,且三個推進(jìn)器的推力變化較為平滑,符合實際工程運(yùn)用中的要求.
2.2 航向航速控制
常規(guī)S面控制器的控制模型為
(9)

文獻(xiàn)[6]將風(fēng)浪流等影響因素,考慮成在某一段時間內(nèi)的固定干擾,通過調(diào)整S面的偏移來達(dá)到消除固定干擾的作用,這樣在整體的運(yùn)動時間內(nèi),實現(xiàn)S面自調(diào)整的目的.該種策略相當(dāng)于在控制模型中加入了有條件的積分環(huán)節(jié),適合用于平穩(wěn)的運(yùn)動控制中,當(dāng)外界環(huán)境或期望值變化較明顯時,該種策略的改進(jìn)效果不明顯.
本節(jié)針對實際應(yīng)用中三推進(jìn)器水上機(jī)器人航向航速變化頻繁的特點(diǎn),為解決由于三個推進(jìn)器安裝方向誤差、外界干擾對航向航速控制的影響.對S面中的調(diào)整項策略做改進(jìn),提出一種基于反饋誤差的自適應(yīng)調(diào)整策略.航向和航速分別用改進(jìn)后的S面進(jìn)行控制.
在傳統(tǒng)教學(xué)過程中,都是由教師講授知識和技能,學(xué)生一味地跟著學(xué)習(xí),簡單的采用期末考試來衡量學(xué)生成績的好壞,這些方式都無法激發(fā)學(xué)生的創(chuàng)新意識。計算機(jī)專業(yè)是實踐性很強(qiáng)的專業(yè),教師通過講解和演示,學(xué)生最多學(xué)會了一些技術(shù)方法和簡單的應(yīng)用,根本沒有創(chuàng)新的意識。學(xué)生通過參加大賽,可以激發(fā)他們學(xué)習(xí)的興趣和潛能,對知識面進(jìn)行更加深入的學(xué)習(xí),從而引導(dǎo)和激發(fā)學(xué)生的創(chuàng)新意識,逐漸可以提出自己解決問題的新思路和新方法。
改進(jìn)后的S面表達(dá)式式為
(10)

步驟1記錄最近N條航向或航速偏差值.

步驟4對當(dāng)前調(diào)整項進(jìn)行削減.
步驟5如果計算出來的調(diào)整項數(shù)值大于當(dāng)前偏差,對調(diào)整項進(jìn)行低通濾波處理.
工程運(yùn)用中具體表示形式為
(11)
式中:et為t時刻的航向或航速偏差;λ為低通濾波參數(shù);η為調(diào)整因子.
(12)
βt為削減因子.
(13)
分析改進(jìn)后的S面控制器,調(diào)整項的加入相當(dāng)于在整個控制模型中增加了積分環(huán)節(jié),提高S面控制對局部小偏差的反應(yīng)能力,削減環(huán)節(jié)與低通濾波環(huán)節(jié)使得調(diào)整項的輸出更加的平滑.
2.3 航跡制導(dǎo)律
航跡跟蹤中最常用的航跡制導(dǎo)律是LOS導(dǎo)航算法,通過將當(dāng)前位置與期望航跡的距離誤差帶入制導(dǎo)律中,求得期望航向,水上機(jī)器人只需跟蹤指令航向即可有收斂的保持航跡.LOS制導(dǎo)策略可分為基于包圍圈和前視距離兩種,本文采用基于前視距離的LOS制導(dǎo)律來進(jìn)行優(yōu)化.基于前視距離的LOS制導(dǎo)原理見圖6.

圖6 LOS制導(dǎo)原理圖
圖6中ψr為制導(dǎo)航向,RP距離為LOS制導(dǎo)律的前視距離,一般取值為1.5~2.5倍船長[11].
當(dāng)機(jī)器人距離期望航跡較遠(yuǎn)時,需要較大的制導(dǎo)角度(即較小的前視距離RP)來較快的接近航跡,而當(dāng)機(jī)器人距離期望航跡較近時,又需要制導(dǎo)航向較小來保證航跡跟蹤的平穩(wěn).而固定的前視距離很解決上述問題,因此提出了時變前視距離的改進(jìn),增加機(jī)器人航跡跟蹤的靈活性.
RP=(RPmax-RPmin)e-λ1d2+RPmin
(14)
式中:d為當(dāng)前位置到期望路徑的距離;λ1為大于零的常值參數(shù);RPmax為最大前視距離,這里為2.5倍的水上機(jī)器人長度;RPmin為最小前世距離,這里為1.5倍水上機(jī)器人長度.
3 仿真與水池實驗
3.1 仿真分析
通過上一節(jié)的數(shù)學(xué)模型,運(yùn)用MATLAB軟件進(jìn)行航跡跟蹤的數(shù)值仿真.在直角坐標(biāo)系下,定義x軸為正東方向,y軸為正北方向,航向角為沿y軸正半軸順時針轉(zhuǎn)動的角度,角度范圍為[0°,360°).設(shè)計航線(0,20)到(30,60), S面控制器的參數(shù)k1=3.5,k2=0.03,定速1 m/s,初始條件:初始位置(0,0),初始航向角0°,無干擾條件下,見圖7.

圖7 改進(jìn)LOS與傳統(tǒng)LOS比較
由圖7可知,改進(jìn)的LOS制導(dǎo)算法能更快的跟蹤航跡,且時變的前視距離不會引起跟蹤過程的振蕩.航跡控制器整體具有良好的穩(wěn)定性、快速性,為實船實驗提供了理論支持.
3.2 水池實驗
水上機(jī)器人的航跡跟蹤實船實驗在試驗水池進(jìn)行,水面有風(fēng)的影響.實物與實驗場地見圖8.

圖8 水上機(jī)器人實物圖
為驗證基于改進(jìn)S面控制的航向航速控制器的實際控制效果,進(jìn)行常規(guī)S面和改進(jìn)之后的S面控制器的對比試驗,設(shè)定期望航向300°.期望速度1.0 m/s,實驗效果見圖9.實驗結(jié)果表明,常規(guī)S面航向控制最終穩(wěn)定后會與期望值存在一個穩(wěn)態(tài)誤差,這個穩(wěn)態(tài)誤差的造成是由于推進(jìn)器安裝偏移造成的.而加入自適應(yīng)調(diào)整后的航向保持可以減少穩(wěn)定誤差,使航向航速保持更為準(zhǔn)確.最終航向保持誤差在1°以內(nèi),改進(jìn)的航向控制器效果較好.圖10為航速保持實驗圖,綜合圖9~10可知,航向航速保持的響應(yīng)時間為15 s左右,驗證了基于S面控制方法的航向航速控制器在響應(yīng)時間上有較好的效果.

圖9 航向保持

圖10 線速度保持
然后,為驗證文中設(shè)計的航跡跟蹤控制器的實際控制效果,進(jìn)行航跡跟蹤實驗,分別直線跟蹤與曲線跟蹤,曲線設(shè)為半徑為15 m的圓,直線段設(shè)定關(guān)鍵點(diǎn)見表2.水上機(jī)器人航跡跟蹤運(yùn)動軌跡見圖11.

表2 路徑規(guī)劃信息表 m

圖11 航跡跟蹤運(yùn)動軌跡
圖11b)每段直線跟蹤有兩端波峰,其中較陡的波峰是由于在轉(zhuǎn)向點(diǎn)處,期望航跡改變造成的,分析航跡誤差可忽略.由圖11可知,所設(shè)計的航跡控制器在實驗中可以完成航跡跟蹤的目標(biāo),說明基于間接航跡跟蹤的兩點(diǎn)改進(jìn)是可行的.航跡跟蹤在穩(wěn)定后誤差在1 m以內(nèi),滿足水上搜救機(jī)器人執(zhí)行任務(wù)的要求,但轉(zhuǎn)彎處的誤差較大,達(dá)到3 m,這一點(diǎn)在后續(xù)的研究工作中還需要進(jìn)一步的改進(jìn).
4 結(jié) 論
1) 實驗的效果證明,基于二次規(guī)劃的推力分配解決了偽逆法輸出過飽和的問題,使得控制量的輸出不會因為限幅而達(dá)不到控制算法的控制效果;針對S面航向航速控制方法的改進(jìn),能有效減少固定干擾帶來的誤差;在LOS制導(dǎo)加入時變的前視距離,能加快水上機(jī)器人跟蹤航跡的速度,增加航跡跟蹤的靈活性.
2) 以三推進(jìn)器水上搜救機(jī)器人為研究對象,將設(shè)計的航跡跟蹤控制器應(yīng)用于實驗中,為解決水上搜救機(jī)器人快速、精確的自主搜救奠定了理論和實驗基礎(chǔ).
3) 在下一步的研究中,將結(jié)合三推進(jìn)器水上機(jī)器人轉(zhuǎn)向靈活的特點(diǎn),設(shè)計滿足回轉(zhuǎn)半徑約束的制導(dǎo)律來實現(xiàn)對復(fù)雜路徑的跟蹤.
猜你喜歡
天水行政學(xué)院學(xué)報(2022年4期)2022-11-18 09:02:36
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
中學(xué)生數(shù)理化·中考版(2018年10期)2018-12-07 00:44:52
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學(xué)院學(xué)報(2017年1期)2017-04-16 05:34:07
中國衛(wèi)生(2014年12期)2014-11-12 13:12:40