基于ADAMS的無避讓側方位立體停車設備升降機構設計
2020-07-27 15:51:37王中原李宣蘇小華
汽車實用技術 2020年13期
王中原 李宣 蘇小華
摘 要:為研究無避讓側方位立體停車設備四桿升降機構的運動規律和驅動裝置的受力情況,采用SOLIDWORKS三維制圖軟件對四桿升降機構進行三維建模,利用ADAMS運動學仿真軟件對四桿升降機構運動過程進行模擬分析得到四桿升降機構的驅動力,為驅動系統的設計提供重要依據,根據分析結果進行結構優化,得到最優的結構形式。
關鍵詞:側方位無避讓停車;ADAMS仿真;受力分析
中圖分類號:U495? 文獻標識碼:A? 文章編號:1671-7988(2020)13-87-03
Design of Lifting Mechanism of Non Avoiding Side Direction Stereo Parking
Equipment Based on ADAMS
Wang Zhongyuan, Li Xuan, Su Xiaohua
(Northern Heavy Industries Group Co., Ltd., Liaoning Shenyang 110141)
Abstract: In order to study the motion law of the four-bar lifting mechanism and the force condition of the driving device of the three-dimensional parking equipment without avoidance. Creating a four-bar elevator for 3D modeling by solidWorks. The driving force of the four-bar lifting mechanism is obtained by using ADAMS software to simulate the motion process of the four-bar lifting mechanism, which provides an important basis for the design of the driving system. According to the analysis results, the structure is optimized, and the optimal structure form is obtained.
Keywords: Parking without lateral collision avoidance; ADAMS simulation; Stress analysis
CLC NO.: U495? Document Code: A? Article ID: 1671-7988(2020)13-87-03
引言
隨著計算機輔助設計的出現和發展,讓人們看到了變革傳統機械產品設計的曙光,人們逐步將計算機輔助設計融入到機械產品設計中,通過計算機軟件處理的相關技術將具體的實物造型展示在眼前,并利用計算機輔助設計技術對其進行分析[1]。這使得機械產品的設計周期大大縮短,可靠性大大提升,降低了產品的生產成本,同時也使得產品更加適合批量化生產。
目前我國城市經濟和汽車工業的發展迅速,機動車輛平均增長速度遠大于城市停車基礎設施的平均增長。立體停車設備以其占地面積少、停車率高、布置靈活、高效低耗、性價比高、安全可靠等優點,越來越受到人們的青睞[2]。無避讓側方位立體停車設備正是其中具有代表性的一種[3]。
無避讓側方位立體停車設備由下橫移裝置、上載車板、四桿升降機構等主要部件構成。在設計中我們引入數字化設計,分別采用運動學仿真分析軟件ADAMS和機械設計軟件SolidWorks,分別對設備進行運動學及動力學仿真,通過分析各運行姿態,得出無避讓側方位立體停車設備最優結構和受力情況,為驅動系統的設計提供重要依據[4]。
1 工作原理
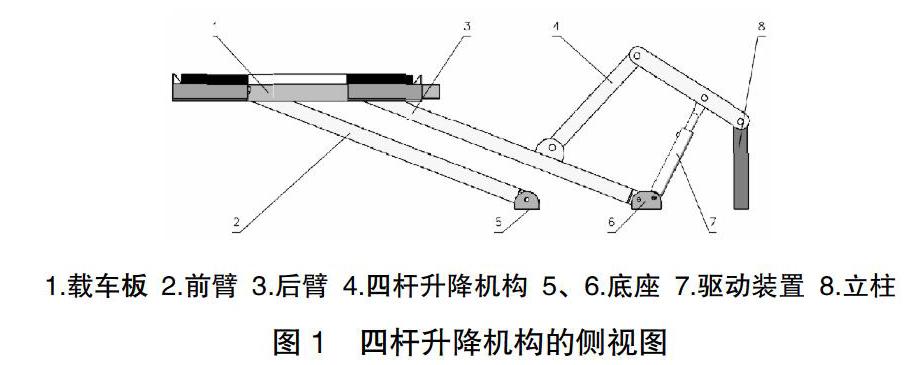
四桿升降機構的設計是無避讓側方位立體停車設備的難點。四桿升降機構連接上載車板和立柱,通過驅動裝置對四桿機構施加驅動力,改變四桿形狀,使上載車板完成升降運動。
圖1為四桿升降機構的側視圖,其工作原理為:驅動裝置7兩端安裝于四桿升降機構和底座,作為整個升降機構的驅動力。驅動裝置將驅動力傳遞到四桿升降機構4,帶動四桿升降機構形狀改動。載車板1與四桿升降機構4和前臂2連接,隨著四桿升降機構形狀改變,帶動載車板升降,實現上下運動。由于四桿升降機構的結構復雜,運動過程中不同的姿態驅動裝置的受力大小也不同,為研究四桿升降機構在整個升降過程中驅動裝置和各鉸接點的受力情況,本文采用虛擬運動學仿真方式進行分析,既省去繁瑣的計算,又能得到更直觀準確的結果。
2 建立ADAMS實體模型
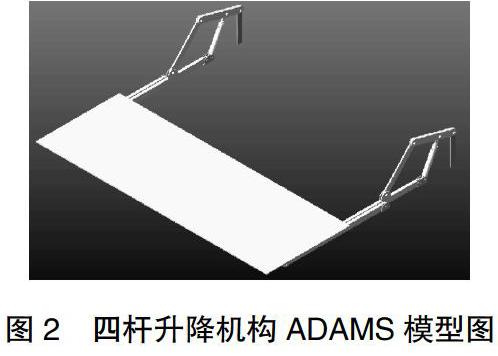
ADAMS作為專業的運動學和動力學仿真分析軟件,其擁有強大的仿真功能,但其實體建模功能較弱,尤其是復雜的幾何模型。為減少設計周期和計算量,本文采用SOLID WORKS進行四桿升降機構的實體建模,如圖2所示。
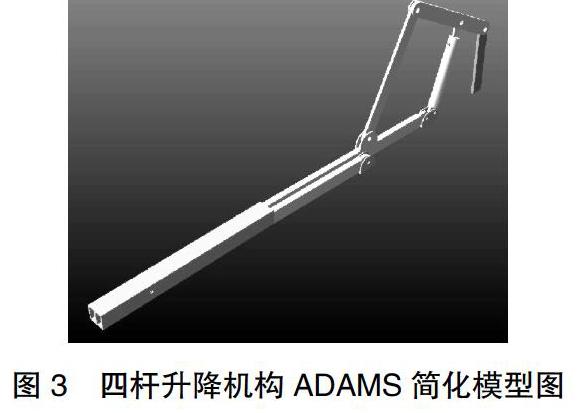
從SOLIDWORKS模型中發現,四桿升降機構為對稱結構,為減小ADAMS計算量,可以將模型簡化,取四桿升降機構的一側進行建模,將上載車板簡化,將簡化后的模型導入到ADAMS中,建立ADAMS實體模型,如圖3所示。
根據四桿升降機構的實際運動狀態,在ADAMS中對已建立四桿升降機構各鉸接點施加約束,添加負載質量、運動副摩擦系數等參數,完成ADAMS運動學仿真前的準備工作。
3 仿真結果分析
通過對四桿升降機構ADAMS模型進行運動學仿真,并提取四桿升降機構各鉸接點和驅動裝置的受力值,得到如下結果,如圖4所示。
從ADAMS的仿真結果中發現由于結構限制,四連桿升降機構驅動裝置的位移短,因此驅動力過大,若要滿足此驅動力,驅動裝置體積將非常大,無法布置,成本也會大大增大。加之各鉸接點受力也非常大,最大值分別為250KN、100KN、250KN,若要承受此力鉸接點連接銷軸的直徑將很大,從結構合理性、制造成本等方面都不合理。
通過各鉸接點對受力曲線的深入分析發現,四桿升降機構在運動的初期各鉸接點的受力都非常大,但當其運動過某一點后鉸接點的受力明顯下降,說明在四桿機構的運動過程中存在運動死點。根據這個發現,對方案進行優化。通過改變四桿形狀的方式,使傳動角不為0°,進而避開死點位置[5]。優化后的四桿機構運動仿真模型,如圖5所示。
對優化后四桿升降機構模型進行運動學模擬,提取各鉸接點受力情況,得到如下結果,如圖6所示。
優化后的ADAMS的仿真結果表明,四桿升降機構各鉸接點受力最大值分別為35KN、32.5KN、30KN,各鉸接點受力較之前的方案已經大幅降低,整個運動過程中機構運動所需驅動力也大幅降低,滿足設計的需求。根據ADAMS仿真結果對四桿升降機構進行結構設計,并建立四桿升降機構SOLIDWORKS模型,如圖7所示。
4 結論
通過SOLIDWORKS、ADAMS等輔助軟件,對無避讓側方位立體停車設備的四桿升降機構進行運動學仿真。發現四桿升降機構在運動過程中出現死點,表現為驅動裝置的驅動力、各鉸接點受力過大的問題。通過深入分析輔助軟件的結果,優化設計方案,成功避開了死點位置,提高了四桿升降機構的合理性,降低設備的成本,最終達到最優的設計方案。說明了在機械設計的過程中引入計算機輔助設計對保障設備的平穩運行,滿足實際工作的需要起到至關重要的作用。
參考文獻
[1] 許乾.計算機輔助設計技術在機械設計中的應用分析[J].科技與創新. 2017(08).
[2] 俞天明.無避讓立體停車庫的設計[J].機械工程師.2012(07).
[3] 程懷舟,周霞.PLC在立體停車庫控制系統中的應用[J].建筑機械. 2004(09).
[4] 王偉,唐向陽,許冬梅.基于ADAMS的立體車庫舉升臂運動學研究[J].起重運輸機械.2011(04).
[5] 陳杰,厲杰.對于克服平面四桿機構死點位置的方法研究[J].化工管理.2017(01).