S模式二次雷達協同監視功能系統仿真
2020-07-27 14:10:34水泉余飛俠
現代信息科技 2020年6期
關鍵詞:仿真
水泉 余飛俠
摘? 要:S模式二次雷達協同監視功能是將多個S模式二次雷達站通過地面通信網絡組成集群,集群內的S模式雷達通過共享目標航跡數據,實現目標的協同捕獲和跟蹤。文章介紹了一個詳細的S模式二次雷達協同組網仿真系統設計和測試方法,該仿真系統通過采用計算機和以太網模擬了S模式雷達站點、集群網絡和集群控制器,實現了協同監視功能和接口協議,對民航S模式雷達協同組網技術的研究、應用以及測試具有較好的指導意義。
關鍵詞:空中交通管理;S模式二次雷達;協同監視功能;仿真
中圖分類號:TN955+.1? ? ? ?文獻標識碼:A 文章編號:2096-4706(2020)06-0039-04
Abstract:The cooperative surveillance function of S-mode secondary radar is to form a cluster of multiple S-mode secondary radar stations through the ground communication network. The S-mode radar in the cluster can realize the cooperative acquisition and tracking of the target by sharing the target track data. This paper introduces the design and test method of a detailed S-mode secondary radar cooperative networking simulation system,which simulates the S-mode radar station,cluster network and cluster controller by using computer and Ethernet,realizes the cooperative monitoring function and interface protocol,and has good guidance for the research,application and test of civil aviation S-mode radar cooperative networking technology righteousness.
Keywords:air traffic management;S-mode secondary radar;collaborative monitoring function;simulation
0? 引? 言
S模式二次雷達作為傳統A/C模式二次雷達的技術升級,其所采用的選呼詢問和鎖定協議,可有效減少空中異步干擾和多徑反射。但由于詢問機代碼(II/SI)數量的限制,在S模式雷達重疊覆蓋區域,如果相鄰雷達詢問機代碼相同,將導致飛行目標被鎖定而無法獲取全呼應答。S模式協同監視功能是將多個S模式二次雷達站通過地面通信鏈路進行互連,構成一個集群網絡,網絡中的雷達節點通過地面網絡進行目標數據交換,采用相同的詢問機代碼(II/SI)以協作的方式實現飛行器的捕獲和跟蹤。歐洲航空安全組織在歐洲多個地區已經建立了多個協同監視網絡,有效地解決了二次雷達詢問機代碼沖突問題并降低了雷達之間的異步干擾。近年來隨著S模式技術在國內的推廣應用,中國民航已要求新建雷達站具備協同監視組網功能,并同時開展了S模式協同監視功能相關課題研究,本文為本公司所承擔的民航科技項目子課題“S模式協同監視組網研究”的成果之一。在S模式協同組網研究中構建多雷達組網環境代價高昂難以實現,S模式協同組網仿真系統通過計算機局域網構建了一個協同監視網絡,實現了S模式二次雷達協同監視功能的仿真和驗證;通過對協同監視數據的記錄和分析,實現了S模式協同監視關鍵技術性能的測試和評估。
1? 協同監視網絡系統概述
S模式協同監視網絡由多個雷達站節點、集群控制器以及地面通信網絡組成,雷達站節點之間以及雷達站和集群控制器之間采用ITU-T X.25或者TCP/IP網絡建立全雙工通信鏈路,根據網絡拓撲架構,協同監視可以有兩種運行模式:
(1)中心式。中心式網絡由一個獨立的集群控制器和多個雷達站組成,集群控制器負責雷達站之間的數據交互,并組織協同監視工作。
(2)分布式。雷達站之間分別建立多個點對點的通信鏈路,直接進行數據交換,每個雷達站自行管理和維護相互之間的協同監視工作。
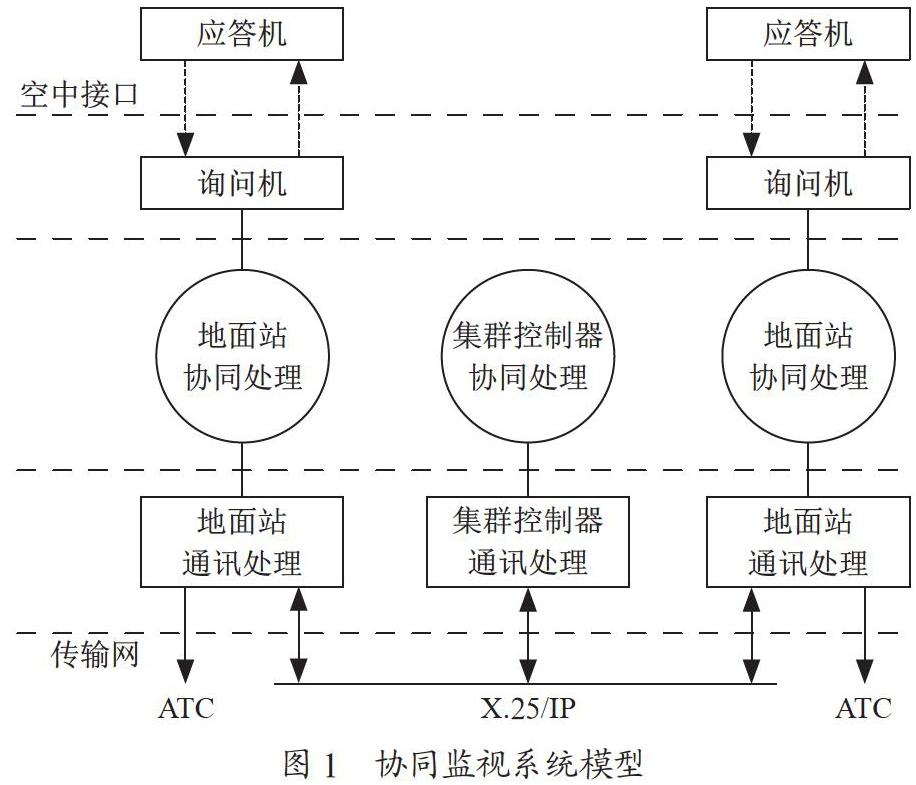
根據協同監視網絡組成,本文構建了一個協同組網系統模型,該模型包括協同網絡中的雷達站節點、集群控制器節點、網絡通訊環境,以及相關協同協議、網絡監視協議及接口的框架組成。協同監視系統模型如圖1所示。
每個地面站包括S模式詢問機、協同監視處理以及通訊處理三部分。
詢問機和飛行器空中接口遵循ICAO附件10規定詢問應答協議,雷達站在非聯網獨立工作時可自行通過全呼和選呼詢問獲取和跟蹤飛行目標,在組網工作時詢問機通過協同監視功能獲取飛行器的目標信息,直接創建和維護目標航跡。
通訊處理采用網絡監測協議(NMP)檢查網絡拓撲結構,確定集群的穩定性并設定當前節點運行模式和狀態。每個集群節點根據運行模式和狀態選擇合適的運行參數,包括確定覆蓋圖、雷達站詢問代碼II/SI以及鎖定策略等。
協同監視處理采用目標獲取和維護協議(TASP)進行航跡獲取和維護,該協議用于站點之間的目標移交,也用于發送信息到存在航跡缺失的雷達站點。
集群控制器通過每個節點上報的CAT048目標報告建立整個集群的航跡列表,執行中心模式系統控制協議,更新相關雷達節點的目標信息。圖2是協同監視功能協議組成。
2? 協同監視仿真系統設計
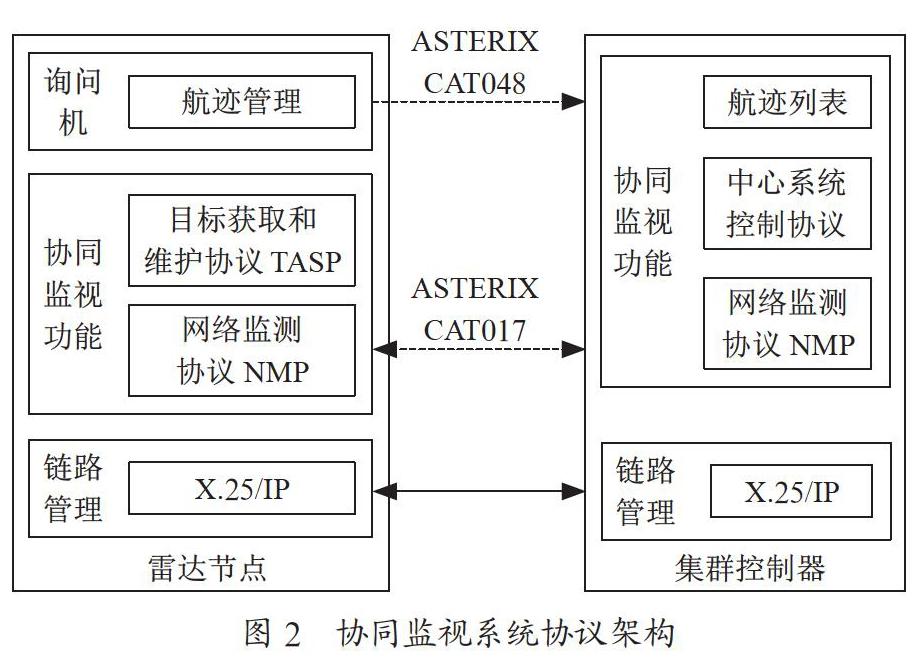
協同監視功能仿真系統通過一組計算機模擬雷達站節點和集群控制器,所有仿真節點均接入一臺網絡交換機組成一個小型的局域網,實現協同監視地面通信網絡的模擬,如圖3所示。
整個仿真系統包括6個雷達站節點、1臺集群控制器以及1臺目標模擬器。其中雷達站節點采用CentOS7 Linux系統,運行雷達協同仿真軟件和相關支撐軟件系統,集群控制器同樣采用CentOS7 Linux系統,并運行集群控制器協同仿真軟件和相關支撐軟件系統,目標模擬計算機用于模擬飛行目標航跡。另外在仿真網絡接入一臺GPS/BD授時設備,所有節點計算機均通過NTP協議進行時間同步。
2.1? 雷達站節點設計
雷達站仿真節點基于Linux系統開發,主要實現三個功能模塊:網絡鏈路管理、協同監視功能模塊(SCF)和詢問機模擬器,如圖4所示。
2.1.1? 詢問機模擬器
詢問機模擬器實現對雷達詢問機航跡獲取、跟蹤和維護的仿真,主要包括以下功能:
(1)接收來自協同監視功能模塊發送來的選呼目標數據,建立雷達站選呼列表。
(2)由內部定時器產生模擬方位信號,產生詢問數據消息發送給目標模擬器。
(3)接收目標模擬器的目標數據,進行模擬目標的航跡創建、跟蹤和終止等處理。
(4)更新選呼目標列表,并通知周期監視處理模塊接收航跡數據。
2.1.2? 協同監視功能
協同監視功能包括以下功能模塊:
(1)周期監測處理。周期監測處理模塊(PMP)定期監測選呼列表,如果有目標狀態發生改變,將通知網絡和故障控制模塊。PMP模塊也定期檢測網絡狀態列表,如果發現網絡拓撲結構發生變化也將通知網絡和故障控制模塊進行處理。
(2)網絡和故障控制。網絡和故障控制模塊主要執行目標獲取和維護協議(TASP)以及網絡監測協議,實現雷達站節點和其他節點之間目標航跡獲取,并監測網絡連接狀態決定網絡拓撲結構和系統狀態。
(3)網絡系統狀態列表。網絡狀態列表保存了本節點和網絡上其他節點連接狀態、網絡拓撲結構、運行類型、組網模式以及所對應的覆蓋圖設置等。
(4)覆蓋圖管理。支持覆蓋圖的導入和更新,根據當前工作模式選擇合適的覆蓋圖。覆蓋圖按照功能劃分,包含鎖定區域、監視區域和數據鏈區域。
2.1.3? 網絡鏈路管理
網絡鏈路管理模塊提供輸出鏈路管理(OLM)服務,在仿真系統里通過網絡接口提供基于TCP/IP連接管理服務,以及詢問機模擬器和目標模擬器之間通訊服務。為了仿真實際通信網的延遲和丟包,在該模塊加入了故障模擬功能,可根據設定的波特率、延遲、丟包率等進行數據包的收發。
2.2? 集群控制器節點
集群控制器節點包括協同監視功能、監視處理模塊、網絡鏈路管理等模塊組成,如圖5所示。
2.2.1? 全局選呼目標列表
集群控制器接收來自各個站點ASTERIX CAT048目標報文,通過目標航跡數據,建立和維護以下目標列表:
(1)全局已跟蹤目標列表,主要包含當前每個相連的雷達站正在跟蹤的目標信息。
(2)單站已跟蹤目標列表,該表包含單個雷達站已經起始正在跟蹤的目標。
(3)單站臨時航跡目標列表,該表包含單個雷達站已經發現正在起始的目標。
2.2.2? 航跡監視數據處理
航跡監視數據處理通過協同監視網絡接收雷達站發送的航跡信息,建立和維護全局選呼列表,并將航跡數據加入到對應的站點選呼列表中;如果沒有航跡、沒有數據接收則刪除該航跡。航跡監視數據處理也具備坐標系轉換功能,可以把航跡數據的坐標系轉換為雷達站本地坐標。
2.2.3? 協同監視模塊設計
協同監視模塊需要實現以下功能:
(1)周期監測處理。監控網絡狀態列表和集群控制器全局目標選呼列表,根據集群拓撲結構選擇覆蓋圖并維護對應的全局選呼列表。如果全局選呼目標列表中一個目標狀態或者集群網絡拓撲發生改變,將更新全局選呼目標列表并確保網絡和故障控制模塊對受影響的目標進行處理。
(2)網絡和故障控制器。如果全局選呼目標列表目標航跡狀態發生改變,則發送協同監視消息給覆蓋責任區的雷達節點,通知該節點更新航跡。通過網絡監測協議實現集群拓撲和狀態判定,以及故障管理功能;當SCF出現故障時能夠對集群進行重組,并對故障進行隔離而不影響集群其他部分的正常工作。
(3)網絡鏈路管理。網絡鏈路管理提供和協同監視網絡的通訊接口以及集群控制器的監控接口。集群控制器作為一個TCP Server,接受來自其他節點的連接請求,和每個節點建立一個TCP連接。
2.3? 目標模擬器
目標模擬器根據設定參數產生多個飛行目標航跡數據,當模擬器接收到各雷達節點發送的詢問請求數據(包括雷達的坐標,當前天線方位、波束寬度、觸發周期等參數)時,根據雷達的坐標和覆蓋范圍計算出該雷達站當前波束方向內是否存在目標,如果存在則將該目標數據(24位地址、高度、模A碼等飛機下行參數)發送給雷達節點。
3? 性能測試
協同監視功能的性能測試主要包括數據記錄和數據分析兩個過程,由獨立的測試軟件模塊完成,該軟件獨立運行在一臺計算機上,接收網絡上各節點發送的CAT048目標數據報、CAT017協同監視消息以及雷達節點和模擬目標器之間的詢問/應答數據,按照航跡地址、節點、天線掃描周期順序存儲在文件里。通過對數據包中CAT048、CAT017以及詢問應答數據的時間戳以及航跡信息統計,實現以下性能評估和分析。
3.1? 集群穩定性分析
包括對雷達節點和集群控制器之間鏈路延遲和丟包率的統計,局部節點或者集群控制器出現故障時,節點工作模式切換時間以及集群從中心式切換到分布式的延遲統計等,如圖6所示。
3.2? 目標獲取和維護時間
目標進入集群覆蓋范圍后,從發現目標到將目標數據轉發鄰近雷達站的延遲實際,以及相鄰雷達站收到數據后反的饋時間;雷達站在重疊覆蓋區域丟失目標后重新請求目標數據到接收鄰近雷達站目標數據之間的延遲實際。
3.3? 航跡質量分析
分析雷達站節點輸出CAT048的數據項,對航跡數量、目標探測概率等進行統計。
4? 結? 論
當前中國民航正在實施S模式監視技術,逐步采用S模式二次雷達替換以前的A/C模式二次雷達,在這過程中同歐洲一樣也遇到了詢問機代碼沖突和不足的問題。通過多個雷達站組網實現協同監視功能,可有效解決詢問機代碼沖突問題,并降低空中的射頻干擾。協同監視功能仿真系統通過計算機網絡模擬了協同監視網絡以及集群控制器、雷達站節點,解決了協同監視網絡需要多個雷達站遠程進行跨地區連接,建立真實試驗環境較為困難的問題。在仿真系統中實現了協同監視協議模型和軟件架構,以及對協同監視網絡性能進行測試的工具和方法,可供雷達廠商以及用戶單位在開發和實施S模式協同監視技術時加以參考和借鑒。
參考文獻:
[1] Annex 10 to the Convention on International Civil Aviation Aeronautical Telecommunications:Volume III Communication Systems [S].ICAO,2007.
[2] Annex 10 to the Convention on International Civil Aviation Aeronautical Telecommunications:Volumes IV Surveillance and Collision Avoidance Systems [S].ICAO,2007.
[3] European Organisation for the Safety of Air Navigation. EUROCONTROL EUROCONTROL Specification for Surveillance Data Exchange-ASTERIX Part 4 Appendix A Category 048:Monoradar Target Reports–REF:EUROCONTROL-SPEC-0149-4A [S/OL].(2017-07-31). https://www.eurocontrol.int/publication/cat048-eurocontrol-specification-surveillance-data-exchange-asterix-part-4-category-0.
[4] European Organisation for the Safety of Air Navigation. EUROCONTROL STANDARD DOCUMENT FOR SURVEILLANCE DATA EXCHANGE Part 5:Category 017 Mode S Surveillance Coordination Function Messages:SUR.ET2.ST03.3111-SPC-02-00 [S/OL].(2019-01-01).https://www.eurocontrol.int/publication/cat017-eurocontrol-specification-surveillance-data-exchange-part-5-category-017.
[5] European Organisation for the Safety of Air Navigation. European Mode S station surveillance co-ordination interface control document:SUR.ET2.ST02.1000-CNP-01-00 [S/OL].(1996-11-28).https://www.eurocontrol.int/publication/european-mode-s-station-surveillance-co-ordination-interface-control-document.
作者簡介:水泉(1975.11-),男,漢族,安徽合肥人,電子專家,高級工程師,本科,研究方向:空管二次雷達。
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49