基于SLAM的激光雷達三維測繪儀前景分析
2020-07-30 14:04:34李寶航孫久翕富靖松李語澤郭麗君
科技視界 2020年19期
李寶航 孫久翕 富靖松 李語澤 郭麗君
摘 要
文章闡述了基于SLAM的激光雷達三維測繪的市場前景。首先介紹了此類產品應用的背景,其次對所研究產品的技術性能作了描述,緊接對技術應用現狀的介紹,最后站在市場需求,市場份額和銷售額的角度上討論產品的應用前景。
關鍵詞
基于SLAM的三維測繪儀;激光雷達;市場前景
中圖分類號: TD175 ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A
DOI:10.19694/j.cnki.issn2095-2457.2020.19.065
隨著近幾年來人工智能的高速進步,三維曲面重構技術應用于許多領域,而激光雷達作為三維曲面重構技術的一個環節,占據著舉足輕重的地位,使得該技術在社會發展的過程中具有更廣泛的應用,基于激光雷達掃描的三維重構技術也自然而然地嶄露頭角。經由調查,我們發現激光雷達在建筑測繪領域應用的較少,目前在建筑誤差測量領域,主要仍應用傳統電子機械設備為測量工具,而這些相對來說難操作,效率低下。本產品則能讓傳統的人力測量以及檢驗變得高效,能對地形地貌進行準確的測量[1],為使用者的后續提供了技術保障。機載激光雷達在三維重構方面的前景即為本文研究重點所在。
1 基于SLAM的激光雷達三維測繪儀簡介
1.1 技術性能簡介
產品集以激光雷達,深度相機與IMU(慣性測量單元)為一體,搭建的機載激光雷達三維空間感知傳感器平臺。激光雷達應用三維點云重建技術,利用三維點云進行場景的空間重建,并取得了方法上的突破。首先,激光雷達對被測空間進行掃描并獲取點云數據,同時通過深度相機以RGB格式完成點云的繪制,隨后利用激光雷達提供的的網口把數據傳送到上位機中。之后通過上位機進行數據預處理的任務。我們利用高斯雙邊濾波算法、ICP 實時配準算法和貪婪三角形投影算法,分別完成對點云的去除離散點、降噪、濾波、拼接、配準、三角網格生成等工作后,使用SLAM算法對周邊進行實時的三維重構,并通過上位機的Wi-Fi模塊遠程回傳實時視頻與立體點云數據。下位機同步讀取IMU信息。同時,為了能讓消費者更清楚的了解三維重構信息和測繪數據,我團隊開發出了能對激光雷達重構的周圍環境三維重構的立體圖與視頻進行實時查看,還能遠程對機載激光雷達三維空間感知傳感器進行控制。我團隊的產品高效便捷,使用方法簡單,適用在建筑領域。我們的潛在客戶眾多,市場廣闊,具有工程實用價值。
1.2 技術優勢特點
(1) 我產品利用激光雷達對被測空間進行掃描并獲取點云數據[2],使機載雷達可以突破未知環境障礙,擴大了可探測的范圍。
(2)我產品平臺搭載深度相機,實現了實時傳輸三維重構點云數據的RGB格式圖像數據,這樣重構出的三維圖片更加逼真,色彩更加明顯,細節感更強。更容易滿足消費者的需要,帶來更好的應用體驗。
(3)完成了遠程控制功能。對于機載激光雷達三維空間感知傳感器,技術人員可以在客戶端遠程接收傳感器數據,從而實現遠程控制。不但增加了便捷程度,也避免了惡劣環境下作業可能對工程人員帶來的危險。
(4)相比于傳統的激光雷達三維掃描裝置,本產品功能齊全,集多種自主開發算法與一身,性價比高,16線激光雷達與stencil相結合便可實時完成三維空間的掃描。
(5)目前,三維點云重建技術鉆研大多在在靜態點云處理領域,重點鉆研優化三維點云模型的方法,而針對點云進行實時重建技術的研究相對較少。然而,在某些領域,如無人駕駛技術中,點云的實時處理尤為重要。為了使三維點云重建技術得到更好的應用,所以在研究點云數據處理算法的基礎上,我產品重點研究了點云數據的實時傳輸、處理以及實時顯示,并據此搭建實驗平臺進行實驗,取得了良好的效果。
2 基于SLAM的激光雷達三維測繪儀應用現狀
在曲面重構方面,數據處理技術已然成熟,在歐美的國家開始較早,在國內的發展也相當快,主要應用于地形數據的采集,文物的保護及工程的安全檢測等方面,Leica和Lindenbergh(2005)公司對蓄水期大壩的不同時段的點云數據處理,能夠計算出大壩的水平位移,從而起到安全檢測的作用。2008年鳥巢奧運圣火的燃氣管道建設工程以及鳥巢的安全監測中,三維激光掃描技術成功應用,恰好展現了該技術相較其余技術的優越性。美國軍方使用三維激光掃描系統,針對魚雷回收船(TWR)和三叉戟戰略核潛艇建立了三維模型,進而研發了用于對相干數據處理的軟件,船舶建造范疇的自動化程度因此大大進步。在三維激光掃描技術的混合應用方面,將地面和機載三維激光掃描技術結合使用,己經成功應用于山海關長城的維護與修復工程、Nuria峽谷鐵路沿線山脈的模型重建工程、Chasmer也結合了這兩種系統完成了某森林的考察任務[3]。
3 市場分析
3.1 市場優勢
本產品基于實用性和廣泛性,讓該機載激光雷達三維空間感知傳感器成為科技測繪領域的必需品。準確的產品定位致力于要重點突出購買者的需求、需要及市場。我們發現:由于激光雷達的可實現功能相對較為單一,并且性價比較低,專業性較強,所以目前激光雷達并不適合普通消費者群體,故我們將目標客戶定位為某一特定應用領域的群體。
本團隊研發了可實現針對不同建筑結構、不同環境的進行三維精準重構并進行地形地貌測繪的機載激光雷達三維空間感知傳感器,該產品適用于室內和室外、建筑和監測等多領域,能夠使使用者方便快捷地獲取相關建筑結構信息及地形地貌數據的誤差指標,通過對客戶端的簡單操控即可完成對空間的掃描并自動獲取環境信息,對于操控人員的技術性水平要求并不高,多數工作者均可以靈活使用。
3.2 市場份額和銷售額
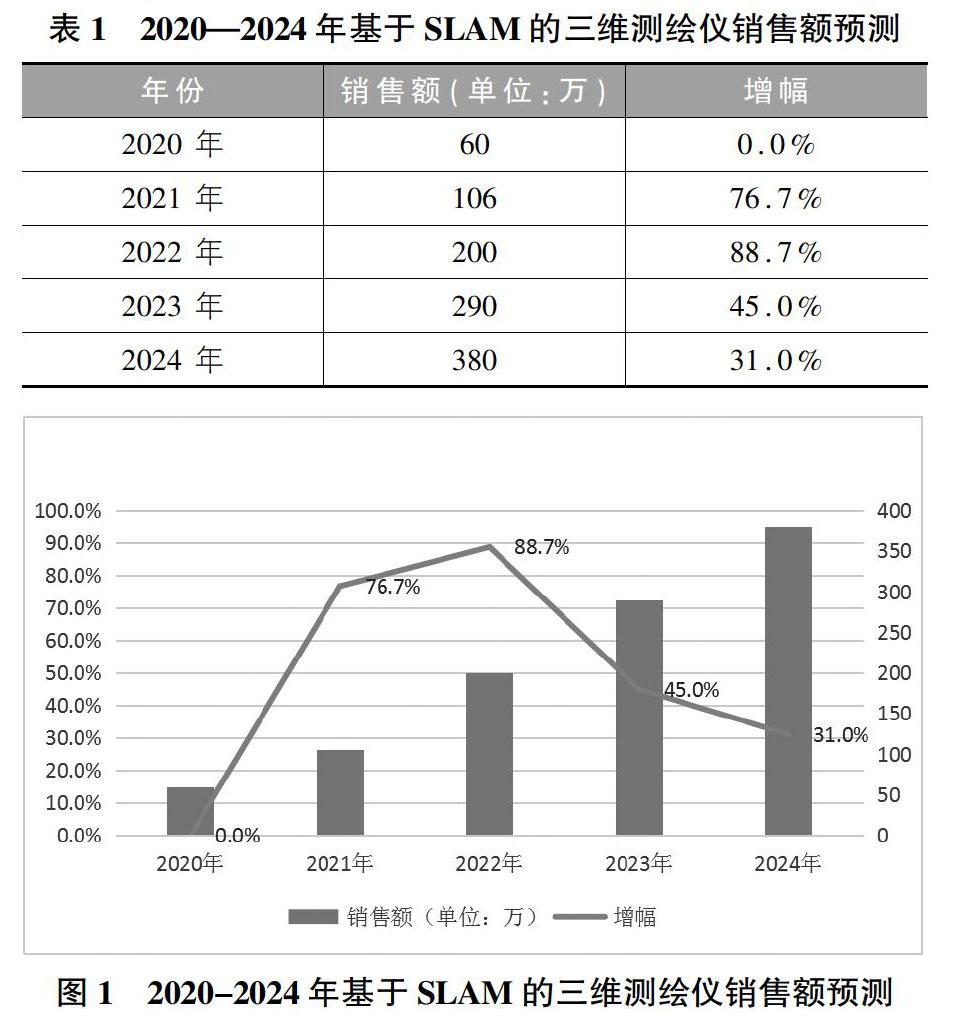
雖然基于激光雷達的三維重構測試儀的設計早有產品且應用于市場,不過應用不多見且價格昂貴,而基于SLAM的三維測繪儀,不僅集stencil、16線激光雷達、深度相機于一體而且集成了大量自主開發算法,價格便宜,實用性強。但由于產品還處于初期階段,它主要的目標客戶為致力于研究古建筑與文物保護的工作人員、設計建筑結構外形的工作者、建筑的所有權人、按設計圖進行建筑的建筑師及工人等。產品的售價為3萬元,并且還可以出售測繪數據,定價為1000元/GB,也可以選擇租賃的方式,價格為2000元/天。基于三維測繪儀的售賣方式的多樣化,以及人們越來越重視建筑的構造以及古建筑的修繕,此三維測繪儀將具有一定的市場份額,并能迅速實現銷售額的增長。
4 結語
綜上所述,隨著激光雷達技術的持續發展,本產品必然會廣泛應用在相關領域,同時,在市場中的需求量一定會不斷增加并占取相當大的市場份額。其前景巨大值得我們為之付出。
參考文獻
[1]張蘇.《基于遙感紋理的黃土地貌景觀圖譜研究——以陜北黃土高原為例》[D].2017.
[2]Fredric18的博客SLAM流程之視覺前端[EB/OL].https://blog.csdn.net/Fredric18/article/details/95.
[3]王艋.《基于地面三維激光點云數據的三維重構研究》[D].2016.
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
文苑(2020年10期)2020-11-07 03:15:36
現代裝飾(2020年6期)2020-06-22 08:43:12
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2015年6期)2015-11-24 03:49:38
Coco薇(2015年1期)2015-08-13 02:23:50
玩具(2009年10期)2009-11-04 02:33:14
