掘進機結(jié)構(gòu)的分析及電控系統(tǒng)的設計
2020-07-31 17:54:38王鵬
機械管理開發(fā) 2020年6期
王 鵬
(同煤集團四老溝礦, 山西 大同 037028)
引言
目前,掘進機是在煤礦中使用最廣泛的用來完成采掘作業(yè)的技術(shù)設備,可以進行破煤、掘進、物料回收、運輸和除塵等相關的井下掘進開采工作。根據(jù)工作方式的不同可以將掘進機分為全斷面掘進機和部分斷面掘進機,它們有著掘進速度快、機械化程度高和安全性好的優(yōu)點[1-2]。但是由于井下條件復雜,導致掘進機在工作面進行作業(yè)時常有故障發(fā)生。此外,一些元件的基礎質(zhì)量和電控系統(tǒng)也不太完善。為了提高掘進機工作時的穩(wěn)定性,提高工作效率和安全性。以懸臂式掘進機為例,分析其結(jié)構(gòu),然后對電控系統(tǒng)進行優(yōu)化設計。
1 掘進機結(jié)構(gòu)分析
以懸臂式掘進機(型號EBZ260)為例進行掘進機結(jié)構(gòu)研究。懸臂式掘進機是目前采煤工作面使用最為廣泛的掘進系統(tǒng),它由本體機構(gòu)、行動機構(gòu)、切割機構(gòu)、裝運機構(gòu)、支撐機構(gòu)和電控系統(tǒng)組成[3],適用于各種地質(zhì)條件下的巷道掘進工作,其結(jié)構(gòu)示意圖如圖1 所示。該型號掘進機工作時的截割面可以達到31 m3,可以滿足的最大巷道的寬度為6.3 m,最大的巷道高度可達5.2 m。此外,它可以對截割硬度為110 MPa 的巖層進行切割,可以滿足最大的單向抗壓強度為90 MPa 的巖層。其各個結(jié)構(gòu)的組成和主要功能如下:
1)本體機構(gòu)。主要用來承載掘進機來自切割部、行走部和運行部的荷載,也是整個掘進機的框架,由機架臺和回轉(zhuǎn)臺組成。
2)行動機構(gòu)。完成掘進機的移動,懸臂式掘進機一般選用履帶式行動機構(gòu),由兩條分別驅(qū)動的履帶組成。
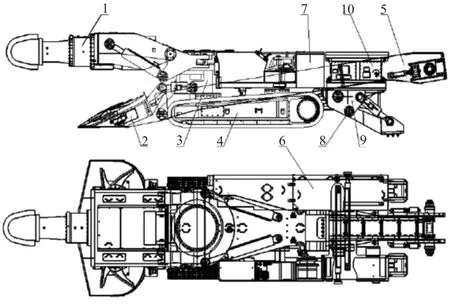
圖1 EBZ260 型號掘進機結(jié)構(gòu)圖
3)切割結(jié)構(gòu)。懸臂式掘進機的切割部分包括懸臂、切割刀具、驅(qū)動電機、運動減速箱和結(jié)構(gòu)安裝防護支架組成。它的工作原理是驅(qū)動電機將動力傳送至截割頭的減速運動箱,減速運動箱通過截割臂將動力傳至切割刀具進行掘進作業(yè)。該系統(tǒng)中還有液壓部分來配合減速運動箱控制切割刀具的移動。
4)裝運機構(gòu)。將掘進開采后的煤炭或物料運向運輸機,完成運輸任務,主要由鏟板、驅(qū)動裝置和測鏟板組成。在裝運機構(gòu)的驅(qū)動裝置一般選擇速率低但是扭矩大的液壓馬達。
5)支撐機構(gòu)。主要用來固定工作時的掘進機,起到穩(wěn)固機器、減少巖層反作用力的作用,由重力支架組成。
6)電控系統(tǒng)。是掘進機中負責控制所有電氣系統(tǒng)的設備。負責收集掘進機數(shù)據(jù)和井下地質(zhì)數(shù)據(jù),根據(jù)這些反饋結(jié)合實際情況,來完成掘進開采作業(yè)。
2 掘進機電控系統(tǒng)硬件的設計
懸臂式掘進機的工作環(huán)境復雜,在工作面上往往空氣濕度大,并且混雜著各種煤塵和雜質(zhì),例如SO2、N0、NO2等腐蝕性氣體也比較多。此外,在采掘機運行時的劇烈振動會對裝置產(chǎn)生損傷。所以在選用硬件時要滿足抗震、耐腐蝕和低故障率的裝置。
2.1 控制器的設計
為了滿足井下工作條件,要求電控系統(tǒng)的控制器要穩(wěn)定、防護等級高,可以適應振動大、濕度強的井下環(huán)境,一般的PLC 不適用于上述要求。為了滿足上述條件,選用Inter Control 公司的DCF-1 控制器作為處理核心[4]。該控制器的通訊接口(輸入端和輸出端)比較多、存儲空間也比較大。懸臂式掘進機組成機構(gòu)比較多,工作環(huán)境復雜,需要控制的變量和電氣設備(包括電機和傳感器)也很多,DCF-1 控制器豐富的通訊接口可以滿足懸臂式掘進機的電氣控制要求。
2.2 硬件的設計
2.2.1 電源的設計
電氣機構(gòu)的電源部分由控制變壓器、高壓熔斷器、空氣斷路器、本安直流電源和非本安直流電源組成[5]。控制變壓器選擇額定容量為1.9 kVA 的變壓器,要求電壓的波動范圍位于-20%~+15%。在電源系統(tǒng)中,本安電源為110 V,為控制器和其他電氣設備供電的電源為24 V,5 V 為總線在隔離模塊中的電壓值。
2.2.2 保護單元的設計
保護單元由低壓/高壓漏電監(jiān)測模塊、電壓變送器、電流變送器、耦合器和各種傳感器組成。使用Pt100 溫度傳感器來反饋工作溫度,然后通過CANopen 總線把收集到的信息傳往控制器。監(jiān)測漏電模塊和耦合器則分布在各個結(jié)構(gòu)的絕緣部,在電源啟動和各個系統(tǒng)開始工作前進行漏電監(jiān)測。此外,位于郵箱的液油傳感器將監(jiān)測油溫和液位,然后將數(shù)據(jù)發(fā)往控制器來判定是否繼續(xù)保護。
2.2.3 控制單元的設計
控制單元主要由Inter Control 公司的DCF-1 控制器組成,結(jié)合上述的電源器件和保護的單元,控制器負責信息的采集、處理和系統(tǒng)控制。控制單元的硬件設置主要由各個控制點、各個系統(tǒng)保護點、中間繼電器和各個元件的輸入和輸出接點組成。控制器選擇DCF-1,中間繼電器選擇CAN 光隔離中間繼電器。這樣不僅可以實現(xiàn)對CAN 信號的隔離操作,還可以放大系統(tǒng)中的信號,抗干擾能力強。
2.3 硬件系統(tǒng)的布置和安裝
結(jié)合上述硬件設計,選用礦用防爆電控箱來對電控系統(tǒng)繼續(xù)安裝,其結(jié)構(gòu)圖如圖2 所示。在電控箱的上側(cè)為接線腔,設有接線端子。下側(cè)為主腔,主腔底部安裝保護單元、變壓器和繼電器。在主腔上部安裝耦合器和傳感器,左側(cè)安裝控制器。
3 掘進機電控系統(tǒng)軟件設計
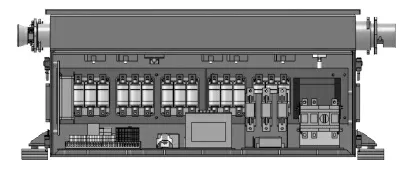
圖2 電控箱結(jié)構(gòu)圖
根據(jù)上述功能和硬件介紹,首先根據(jù)如圖3 的主程序流程圖完成主程序軟件設計。它的主要作用是在各個元件和子程序開始啟動后,通過等待和命令控制,完成對各個子程序的調(diào)用。
在完成主程序的軟件設計后,繼續(xù)初始化子程序的設計,它主要是通過控制器對CANOpen 的設備進行管理,同時對傳感器發(fā)回的數(shù)據(jù)進行分析處理,它的系統(tǒng)流程圖如圖4 所示。
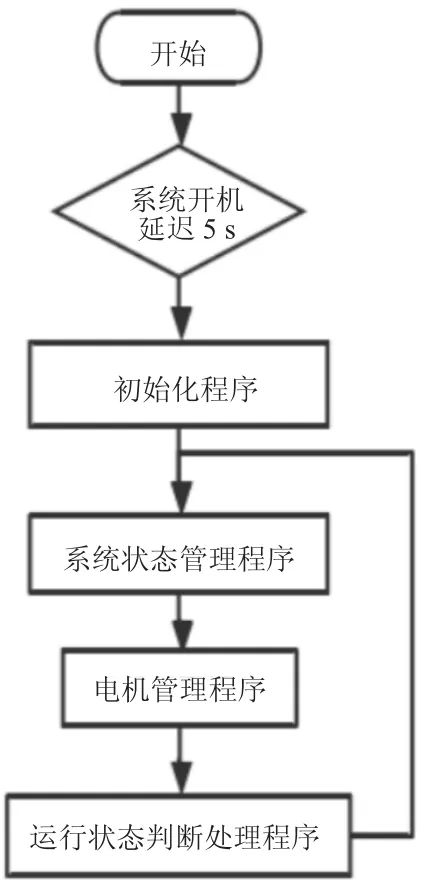
圖3 主程序流程圖
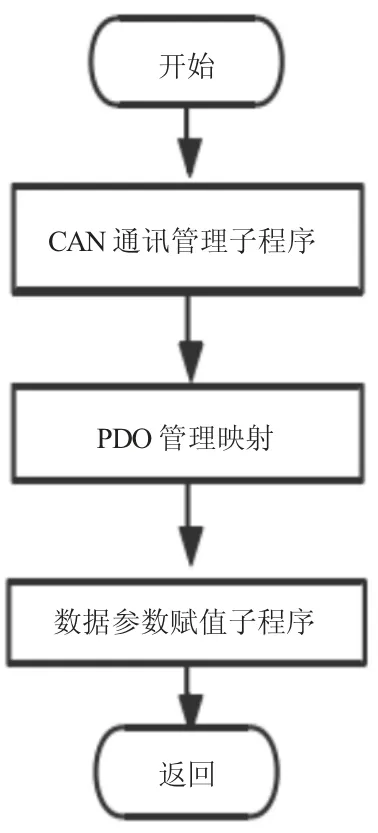
圖4 初始化子程序流程圖
系統(tǒng)狀態(tài)的子程序是對控制器進行I/O 初始化,然后將內(nèi)部控制和外部I/O 完成映射起到對系統(tǒng)各個工作部分的監(jiān)測工作。包括漏電監(jiān)測輸入計算、系統(tǒng)進出電壓的監(jiān)測和其他傳感器的監(jiān)測處理等。
電機狀態(tài)管理子程序是對電機工作狀態(tài)進行分析處理,是針對掘進機電機的溫度、電流進行的采集映射和處理。此外,也對電機油箱和工作時間進行監(jiān)測統(tǒng)計。
運行狀態(tài)子程序是掘進機運行邏輯核心,收集所處工作環(huán)境和目前的運行狀態(tài),直白地顯示在操作臺上,根據(jù)功能要求和相關的工作經(jīng)驗,提出操作意見和狀態(tài)分析結(jié)果。
4 結(jié)語
根據(jù)掘進機在井下工作時的環(huán)境要求和電氣設備要求,以懸臂式掘進機為例,提出了具有抗干擾能力強、耐腐蝕、效能好的掘進機結(jié)構(gòu)設計,其核心是Inter Control 公司的DCF-1 控制器。此外,還包括了電源、保護單元和控制單元的設計。然后根據(jù)工作要求和硬件設施,針對掘進機電控系統(tǒng)的工作狀況,提出了掘進機電控系統(tǒng)的軟件設計,設計后的軟件可以完成設計要求,包括對掘進機的各個工作子程序、電控系統(tǒng)狀態(tài)的監(jiān)測和管理。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17