基三維空間測量的水保、環保核查比對方法研究
2020-07-31 09:49:51韓利張慶霞王一波李曄秦鵬劉啟飛
粘接 2020年7期
關鍵詞:可視化
韓利 張慶霞 王一波 李曄 秦鵬 劉啟飛
摘要:為提高輸電線路工程項目驗收中環保和水保核查的效率,采用傳統的人工驗收已經不能滿足工程驗收的要求。由此,針對該需求,提出一種基于三維激光掃描的環保、水保核查比對方法。首先,通過無人機三維激光掃描系統實現對輸電線路環保的采集;然后通過數據的預處理,實現對點云數據的分類,并引入基于Hough變換與相似度原理的檢測方法,實現對驗收工程項目周邊環境缺陷的檢測;最后搭建軟件測試平臺,對上述方法進行測試。結果表明,上述方法可很好的實現輸電線路周邊環保的可視化展示,從而為項目驗收提供了更多的參考。
關鍵詞:三維激光掃描;點云數據;環境缺陷檢測;可視化
中圖分類號:TM835
文獻標識碼:A
文章編號:1001-5922(2020)07-0046-04
目前,我國關于項目驗收中雖然出臺了相關的技術規范與標準,但大部分都是些總體性的要求,缺乏具體的規定或技術標注,而不利于項目驗收中的各項指標確定,從而導致在環保、水保驗收中很多環境要求無法得到落實。同時,傳統環保和水保核查驗收中,通常通過人工勘查的當時,但對于一些比較偏遠的電力項目,則很難實現人工勘查。因此,這就要求結合信息技術。一方面通過現代信息技術解決人工勘查難題,另一方面是提高無人機在電力項目環境驗收中圖像的清晰度。因此,引入三維激光雷達系統,通過激光點云實現對數據的采集。
三維空間測量的環保、水保核查具體思路
1當前針對電力系統的環保、水保核查方面,很大部分是依據傳統的人工進行核查,這種方式不僅排查難度大,同時非常耗時。因此,采用三維激光雷達系統進行電力項目的環保、水保核查,是當前項目驗收的重要途徑創新。對此,本研究在采用激光雷達三維測量完成對圖像采集,經數據預處理,并通過一定的圖像匹配算法,找出項目驗收中環保與水保不符合要求的地方,從而為當前項目驗收提供信息化的處理方式。
2激光雷達的數據采集
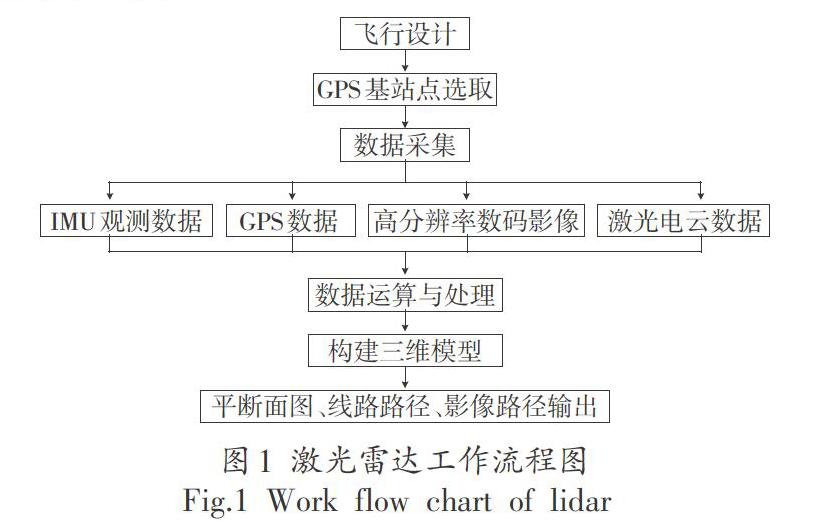
激光雷達(LiDAR,Light?Detection?And?Ranging)作為一種新型的測量系統,主要依據激光測距、差分GPS等技術進行三維坐標數據測量,進而生成LiDAR數據影像,得到數字高程模型。因此,依據該技術,將電力項目驗收的環保、水保核查流程設計為如圖1所示。
從圖1中看出,實現電力項目的環保、水保驗收,主要是依據激光雷達測量系統對圖像的采集。通過數據運算構建環境的三維影像圖像,并進行圖像的預處理和輸出。
3數據預處理
在完成以上數據采集后,則需要對數據進行預處理、校驗和激光點云數據分類,以此為后續的圖像檢
測提供更為高質量的圖像。
3.1激光點云預處理
激光數據預處理主要涉及定位、坐標轉換等。在定位過程中,則需要利用到GPS數據以及其他的參數。預處理的具體過程如下所示:
1)數據定位。首先分離GPS數據與IMU數據,然后將前者應用到定位解算中。在本次定位中主要利用了雙差分定位技術提高數據的精度。
2)數據定向。在定位后對激光掃描儀的坐標進行計算,本研究則主要利用GPS天線位置的坐標。具體所需要的數據包括:廠商提供的IMU、激光掃描儀相對位置數據、IMU偏心分量數據,實測得到的GPS天線偏心分量。在此基礎上,根據各個激光點的坐標完成對點云文件的定向過程。
3.2數據檢校
數據檢校的參數主要有航偏角(Heading)、翻滾角(Roll)等4個參數,需要結合Lidar數據、地物等實現校正。具體的過程如下所示。
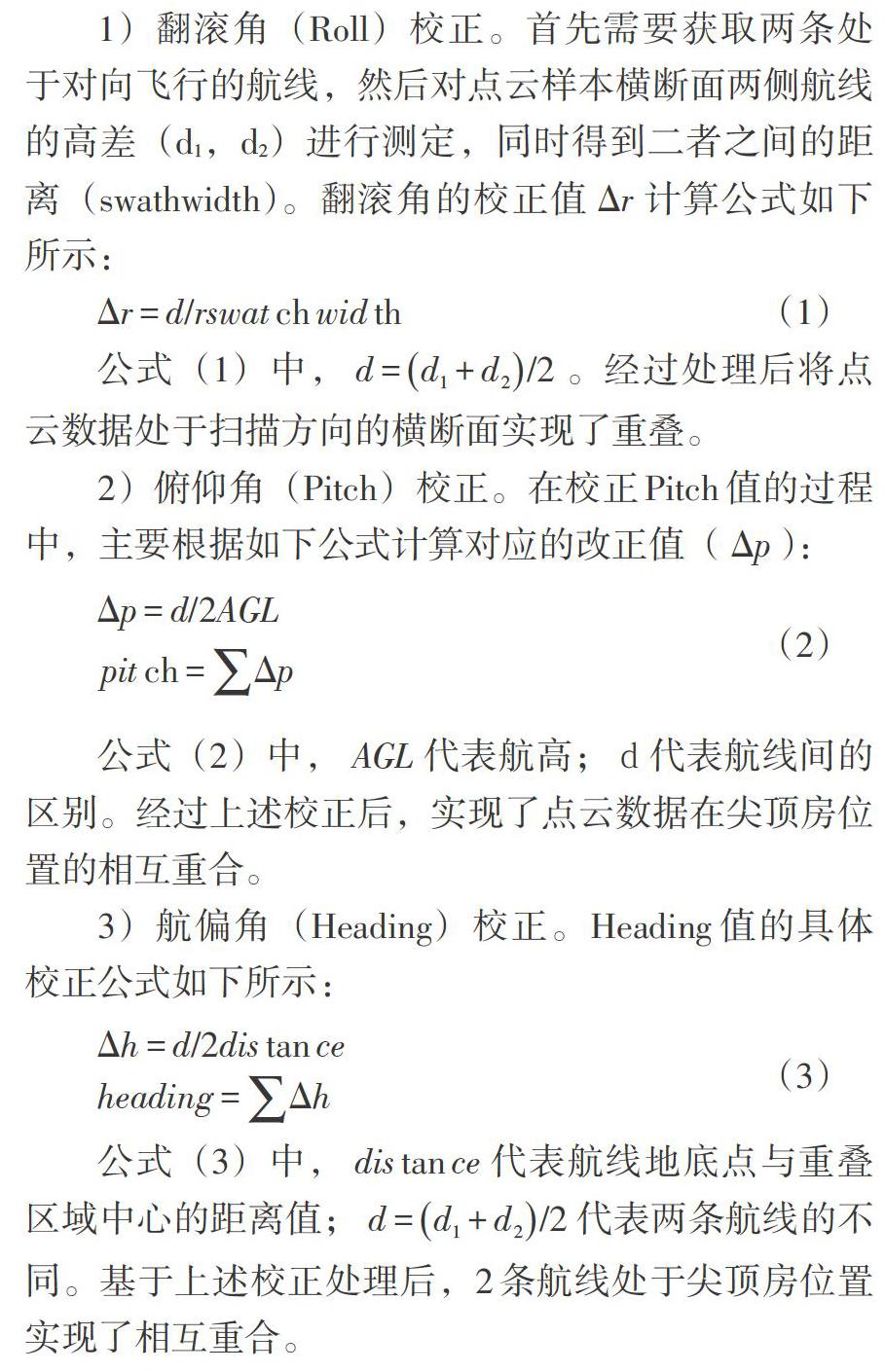
1)翻滾角(Roll)校正。首先需要獲取兩條處于對向飛行的航線,然后對點云樣本橫斷面兩側航線的高差(d,d)進行測定,同時得到二者之間的距.離(swathvidth)。翻滾角的校正值Ar計算公式如下所示:
公式(1)中,d=(d,+d)/2。經過處理后將點云數據處于掃描方向的橫斷面實現了重疊。
2)俯仰角(Pitch)校正。在校正Pitch值的過程中,主要根據如下公式計算對應的改正值(Ap):
公式(2)中,AGL代表航高;d代表航線間的區別。經過上述校正后,實現了點云數據在尖頂房位置的相互重合。
3)航偏角(Heading)校正。Heading值的具體校正公式如下所示:
公式(3)中,distance代表航線地底點與重疊區域中心的距離值;d=(d,+d,)/2代表兩條航線的不同。基于上述校正處理后,2條航線處于尖頂房位置實現了相互重合。
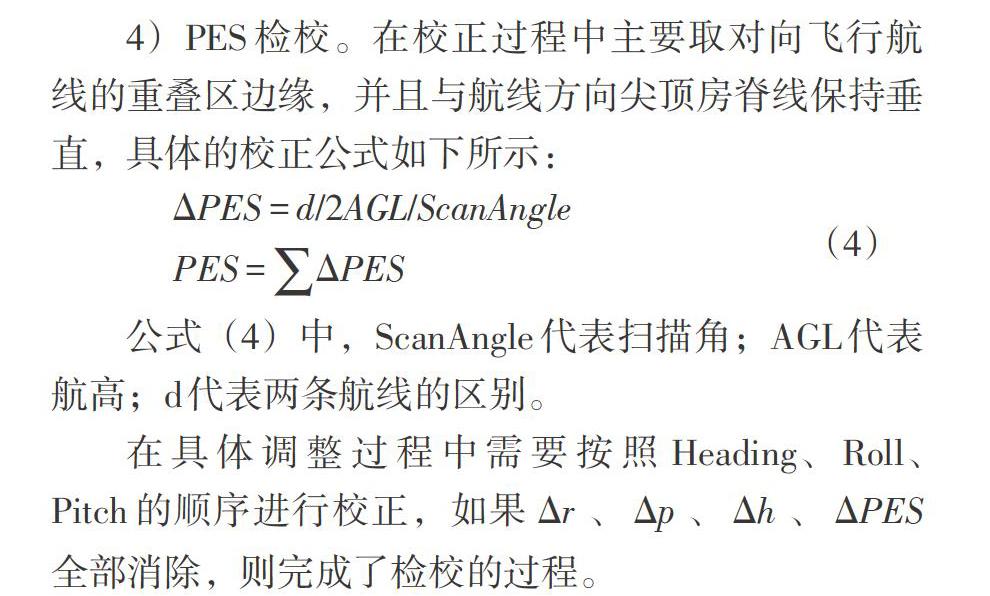
4)PES檢校。在校正過程中主要取對向飛行航線的重疊區邊緣,并且與航線方向尖頂房脊線保持垂直,具體的校正公式如下所示:
公式(4)中,ScanAngle代表掃描角;AGL代表航高;d代表兩條航線的區別。
在具體調整過程中需要按照Heading、Roll、Pitch的順序進行校正,如果△r、Ap、Ah、APES全部消除,則完成了檢校的過程。
3.3激光點云分類
為了對各種類型的地物進行劃分,需要對先前處理的點云文件進行分類處理,由此能夠為之后的環境驗收提供必要的信息。自動分類的詳細流程如圖2所示。
3.4DEM制作
在制作數字高程模型(DEM)時需要利用先前自動分類得到的數據,具體需要通過Terrascan軟件來將地表類型的激光點巖數據構TIN,然后對高程點進行提取可以得到對應的DEM。
3.5DOM制作
在制作正射影像時主要利用了TerraPhoto軟件,需要基于獲取影像連接點的方式對影像外的方位元素進行修正,首先在各個像對中選擇不少于8對均勻分布的連接點,然后根據具體情況進行修正處理。在得到修正后的外方位元素之后,結合先前得到的DEM.來獲取需要的正射影像。
DOM處理技術的特征主要體現在如下方面:
1)在影像格式轉換方面達到了使用的標準。
2)基于拼接技術對特殊的地形區域進行處理,以保證達到分析的要求。
3)采用匹配連接點調整方式進行處理,滿足了使用的要求。
4)基于解算得到航片姿態參數。
5)影像色調保持了良好的均勻性,鑲嵌邊位置3灰度特征較為穩定。
3.6三維模型生成
根據之前的處理過程已經得到了DEM、DOM,在此基礎上可以對三維圖像進行設計,具體需要與電力工程中的線路模型等進行結合。在具體制作過程中,需要對電力線等地物進行建模,此過程中需要利用到高分辨率航片以及對應的點云設計,然后完成紋理貼圖的過程。中在建模過程中可以采用不同的方法,首先是直接利用3dsmax軟件實現建模的方式,即利用先前得到的點云數據進行渲染,可以對特定的剖面進行繪制,由此得到需要的規則模型;其次是基于得到的點云數據來建立三角網模型,確保模型能夠在軟件中獨立運行。經過分析,在本次研究中采用了第一種方法完成建模過程,需要在AlatuEarth內集成鐵塔和線路模型,將電業局提供的相關信息導入到數據庫中,以此與三維模型進行配合應用。
4圖像特征提取與匹配
在完成上述激光點云數據處理的基礎上,要找到項目驗收過程中存在的問題,需要對圖像進行匹配和比對,從而找到項目驗收過程中存在的問題。對此,本文提出采用Hough變換圖像特征進行提取,然后通過相似度函數對圖像進行比對。Hough變換方法主要對圖像空間內的直線進行變換,可以得到參數空間內的點形式。如果處于參數空間內的直線相交于一點,則他們在圖像空間內的對應點必然處于相同直線上。根據上述原理,結合參數空間的重合點數量來確定圖像空間的直線特征。當參數空間內相交于相同點的直線較多時,則可以對檢測的閾值進行設置,如果統計的次數高于閾值,那么可以認為在圖像空間內存在對應的直線。
在圖像匹配方面,建立專用的相似性度量函數,在此基礎,上可以對環境缺陷進行評價。當兩圖像的相似度較高時,則轉換到參數空間后的峰值數量等特征往往具有較高的相似度,據此可以對二者的相似度做出較為準確的評價。
5系統軟件設計
5.1軟件體系結構
本文設計的輸電網水保與環保核查三維展示系統主要使用了C/S架構方式,即傳統的客戶端/服務器模式,其中客戶端主要是用戶操作的普通計算機,服務器則利用了數據服務器。用戶通過客戶端軟件來進行操作,包括建庫、查詢、修改以及維護等操作,可以訪問服務器端的信息,并獲取到處理后的結果。本系統中的相關技術如下所示:
1)系統主要面向Windows平臺,客戶端與服務器端均為Windows平臺環境。
2)基于OneMapSDI引擎來獲取各系統的數據,此過程中利用了特殊的數據調度算法,滿足了數據提取和應用的要求。
3)在數據管理方面利用了sQLServer數據庫,建:立數據庫表的方式完成對相關數據的維護。
4)系統實現過程中采用Java開發語言進行開發。5.2系統硬件與網絡結構
本系統對于局域網訪問提供了完善的支持,在數據通信與共享過程中利用了分級管理模式,本系統的拓撲結構設計如圖3所示。
5.3系統實現
為驗證上述方案的可行性,利用無人機對上述系統進行搭建。其中在輸電線路點云數據采集,無人機采集三維效果示意如圖4所示,在過程中,無人機主要搭載GL70激光掃描儀,其掃描頻率可以達到550kHz,重量12kg,測距范圍和精度分別是350m、土10mm。掃描儀中集成了慣導系統等,可以采集到更多的信息。另外,掃描儀主要搭載在Dragonr50無人機中,該類型的無人機廣泛應用到了多個領域中,其連續飛行時間可達2.5h,"飛行速度可以達到80km/h,機身與最大起飛重量分別是35kg、70kg。在實驗過程中的飛行距離和高度分別是30km、130m,飛行速度控制在30km/h,總計飛行時長lh。掃描對象主要是某500kV輸電線路,該線路所處的地區地勢較為平坦,位于線路東側和西側的分別是村鎮和山地,線路兩側的寬度均為100m,長度為200m。
根據上述結果可知,采用基于激光雷達的線路環境缺陷檢測方法具有一定的優勢,不僅能夠對導線一地面等多種類型的缺陷進行檢測,而且可以獲取到缺陷的詳細信息,包括缺陷的具體位置、范圍以及種類等。相對常規的檢測方法,檢測精度高、速度快,因此具有廣闊的應用前景。
6結語
文章主要對基于無人機激光雷達的線路環境缺陷檢測方法進行了研究,在研究過程中進行了相關的實驗,即通過搭載于無人機的三維激光掃描儀采集到了某線路的點云數據,然后通過預處理以及特征提取等過程完成了對數據的處理,在此基礎上建立了對應的三維模型,并完成了對線路環保缺陷的識別。研究結果顯示,該方法有助于改善輸電線路環保驗收的效率,相對于常規的檢測方法在效率以及精度上均體現出一定的優勢,并且能夠獲取到缺陷的位置以及類型等詳細信息,彌補了傳統環保驗收方式中的不足問題,適合于應用到實際輸電線路工程的環保驗收中。
參考文獻
[1]浦石,吳新橋,燕正亮,等.無人機激光雷達智能識別輸電線路缺陷[].遙感信息,2017,32(04):52-57.
[2]黎炎,李哲,胡丹暉,等.基于雷達監測信號的輸電線路安全預警系統[J].電測與儀表,2019,56(04):70-74+94.
[3]王松波,李馬驍,李海瑞,等.基于三維激光雷達技術的輸電線路廊道障礙物檢測研究[J].電子科技,2019,32(04):81-84.
[4]李偉,唐伶俐,吳昊昊,等.輕小型無人機載激光雷達系統研制及電力巡線應用[J].遙感技術與應用,2019,34(02):269-274.
[5]劉立超,魏國粱,張青松,等.基于激光雷達的農業耕作微地貌測量裝置設計與試驗[J].農業機械學報,2019,50(07):84-92.
[6]韓曉言,何靜,游安清.激光雷達在電力巡線應用中的計算方法[J].太赫茲科學與電子信息學報,2019,17(04):703-708.
[7]龔昕,張楠.基于Hough變換的圓檢測算法的改進[J].信息技術,2020,44(06):89-93+98.
[8]杜靜,魏鴻磊,樊雙蛟,等.基于HOUGH變換的指針式壓力表自動識別算法[J].機床與液壓,2020,48(11):70-75.
[9]王奇鍇,潘如如,高衛東,等.基于圖像處理的牛仔織物緯斜檢測方法[J].棉紡織技術,2020,4806):31-35.
[10]張夏,肖啟芝,許凱,等.Haar-like特征在稀疏建筑物檢測中的應用[J].測繪地理信息,2020,45(03):39-43.
猜你喜歡
江蘇安全生產(2022年7期)2022-08-24 02:11:52
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
北京測繪(2022年6期)2022-08-01 09:19:06
選煤技術(2022年2期)2022-06-06 09:13:12
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
山東農業工程學院學報(2019年11期)2020-01-19 02:49:22
傳媒評論(2019年4期)2019-07-13 05:49:14