基于ARM的嵌入式自適應溫度控制系統設計*
2020-08-01 06:39:08劉塵塵
沈陽工業大學學報 2020年4期
劉塵塵
(西昌學院 信息技術學院, 四川 西昌 615013)
溫度控制在很多領域都有市場需求,隨著工業自動化水平的不斷進步,電阻爐在工業生產加熱和科學實驗中廣泛使用,對其溫度進行準確可靠的控制在提高產量、節能減排和確保實驗效果等方面具有十分重要的現實意義.然而,在實際應用中,電阻爐受時滯長、慣性大、擾動多等方面因素的影響,導致常規的溫度控制系統無法對電阻爐的溫度實施有效地控制,控制精度不高,動態響應特性較差.
近年來,有學者和專家提出了通過設計嵌入式系統對其溫度進行在線控制,引起了國內外同行的關注和重視,成為這方面的研究熱點[1-8].文獻[1]基于C8051F021單片機設計了大功率半導體激光器溫度控制系統;文獻[2]以數字PID控制算法為核心,利用嵌入式實時操作系統uC/OS-Ⅲ實現了電阻爐水溫控制系統的多任務軟件設計;文獻[3]仿真研究了嵌入式智能加熱爐的在線溫度控制,基于對系統的在線辨識結果來進行PID控制器整定,具有較好的控制精度和魯棒性;文獻[4]設計了一種基于ARM的高精度可調諧LD溫度控制器,具有極高的穩定性和較短的響應時間;文獻[5]提出了通過Smith智能控制算法來實現電阻爐溫度控制的方案,并使用Simulink軟件對實際控制效果進行仿真,具有抑制噪聲干擾和消除時滯的效果;文獻[6]研究了輥道窯的溫度控制問題,提出了模糊Smith的復合控制策略,設計了分段控制的方式.
本文主要對電阻爐的溫度控制問題進行了研究,基于ARM構建了嵌入式溫度控制系統,針對電阻爐溫控過程中存在時滯性和慣性大等問題,為了提高溫度控制的精度和穩定性,綜合了PID控制與神經網絡控制,設計了基于神經網絡的PID自適應控制器,在此基礎上,采用模糊Smith智能控制方法對系統的純滯后進行預估補償來消除系統超調和增強控制的穩定性,利用實驗來測試本文設計的溫控系統和控制算法,并且與傳統PID和模糊PID控制兩種算法進行了性能比較與分析,從而驗證了該系統的有效性和可行性.
1 系統構成和硬件設計
1.1 系統總體方案
本文設計的電阻爐溫度控制系統總體設計框圖如圖1所示,主要包含了實時溫度數據的A/D采集和液晶顯示、制冷和加熱裝置以及驅動、上位機通訊模塊、JTAG調試接口、報警和復位設備、ARM處理器等部分.
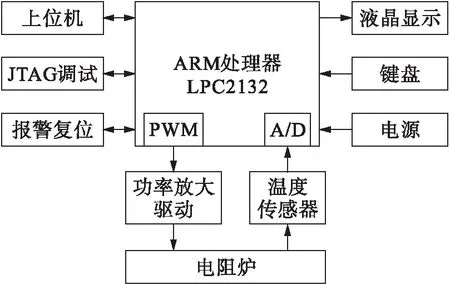
圖1 系統總體框圖Fig.1 Overall block diagram of system
1.2 微處理器
ARM處理器LPC2132是整個嵌入式溫度控制系統的核心,它是一款32位的高性能微處理器,封裝小、功耗低,帶有64 kB的FLASH存儲功能,支持實時仿真和嵌入式跟蹤,有多個ADC和PWM單元,在程序設計時支持C語言.
1.3 溫度設定、檢測與顯示
系統的溫度感應裝置包含了K型熱電偶及相應的數模轉換芯片MAX6675.K型熱電偶的穩定性好,工作溫度范圍大,能夠測量-200~1 300 ℃之間的溫度,MAX6675的工作電壓低,在3.0~5.5 V之間,具備0.25 ℃的溫度分辨率,其轉換結果與溫度測量值之間的線性關系較強,不需要單獨進行線性化處理,變換關系為
溫度=轉換后數字量×1 023.75/4 095
(1)
系統的溫度設定由鍵盤來實現,溫度顯示使用不需要驅動的CMD520TT00-C1型LCD來完成,其工作電壓為3.3 V,能夠直接與微處理器相連,可以顯示實際溫度和設定溫度.
1.4 溫度控制設備
系統使用固態繼電器來控制電路的連通和斷開,具有較高的開關速度,一定程度上可以克服溫度系統的慣性影響.由于ARM處理器具有PWM通道,利用輸出的PWM方波,采用可控硅電路的開啟來改變電阻絲的功率.將可控硅與電阻絲相連,通過光電耦合器實現數據輸出,完成開關控制,實現加熱和降溫的目的.
2 系統軟件設計和控制策略
2.1 系統工作原理
電阻爐溫度控制系統采用閉環控制方式,其工作原理是:首先將外部設定的溫度值和溫度傳感器采集得到的溫度測量值同時輸送給ARM微處理器的控制部分,計算設定值與實際值的偏差,根據預先設計好的控制算法得到輸出控制量,在一定周期內以開關形式輸出PWM來控制電阻絲的通斷電,從而將溫度控制在目標值附近的一定范圍內,并保持穩定.
2.2 基于神經網絡的PID自適應控制
基于PID控制的溫控系統的離散算式可以表示為
(2)
式中:KP、KI和KD分別為比例、積分和微分控制參數;u(k)和e(k)分別為系統在k時刻的輸出和溫度控制的偏差;T為系統的采樣周期.
Apte 1957: Vaman Shivaram Apte, The Practical Sanskrit-English Dictionary (revised and enlarged edition), Poona.
單獨利用PID控制器進行溫度控制比較簡單方便,但是要想得到較好的溫控效果,必須調整好比例、積分和微分三個控制參數之間動態變化關系.神經網絡可以通過自身強大的系統性能學習能力實現PID三個參數的最佳組合[9].因此,系統采用基于神經網絡的PID自適應控制策略來解決電阻爐溫控的非線性問題.
作為系統自適應控制的核心,單神經元網絡是一個多輸入單輸出的非線性單元,系統采用2×3×1的形式.首先,在前向傳播階段,使用系統的溫度設定值和系統的輸出反饋值作為神經網絡的輸入,以控制量作為神經網絡的輸出.在輸入層,取設定值s(k)和實際值y(k)作為神經元的狀態函數v,即
v(k)=[s(k),y(k)]
(3)
在隱藏層,三個神經元分別完成比例、積分和微分運算.采用線性加權求和運算方式,即
(4)

qi(k)=g(xi(k))
(5)
式中,g(*)為激活函數.
在輸出層,其輸入為隱藏層到輸出層的加權和,即
(6)

(7)
在誤差反向傳播階段,采用遞歸梯度下降法在線學習權重值.把設定值與實際值的偏差最小化作為訓練學習的目標,可表示為
(8)
(9)
式中,η2為隱藏層到輸出層的權重學習步長;δ1的表達式為
[y3(k)-y3(k-1)]
(10)
從輸入層到隱藏層的權重更新方程為
(11)

(12)
基于神經網絡的PID自適應控制根據溫度設定值與溫度實際值的偏差,利用上述規則進行自我學習和更新,不斷調整權重值,使其達到最佳值,從而使整個系統具有自適應性,確保溫度控制精度.
2.3 模糊Smith預估補償控制
取控制器和被控對象的傳遞函數分別為Gc(s)和G0(s)e-τs,整個系統的閉環傳遞函數可以表示為
(13)
式中,e-τs為滯后環節,會導致系統的超調量較大和調節時間較長,可能會影響控制穩定性.為了確保控制效果,在基于神經網絡的PID自適應控制中加入模糊Smith預估補償[10-11]來消除時滯影響,通過預先估計整個系統的動態特性,使得控制器提前做出動作,加快動態調節過程.
加入了Smith預估補償Gm(s)(1-e-τ1s)后的系統閉環傳遞函數可以表示為

(14)
式中,只要G0(s)=Gm(s)和τ=τ1,就可以消除滯后環節對溫控的影響.然而,該條件一般很難實現和滿足.因此,考慮采用模糊控制的思想,使得補償環節盡可能接近滯后環節.
根據模糊控制原理,考慮溫度偏差e和溫度偏差的變化量ec作為其輸入變量,將其各分為7檔{NB,NM,NS,ZO,PS,PM,PB},模糊Smith預估補償控制需要建立模糊規則和選擇模糊機理.在設計規則時需要考慮:如果溫度偏差較大,模糊輸出應該使得實際溫度接近設定溫度,防止超調過大;如果溫度偏差較小,模糊輸出應該使得溫度恒定.具體的模糊補償控制規則如表1所示.
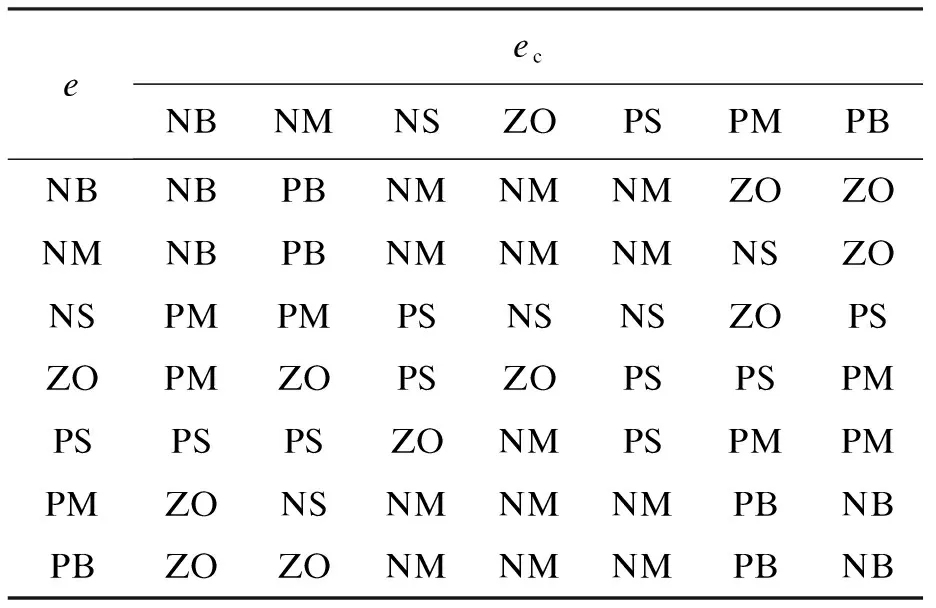
表1 模糊補償控制規則Tab.1 Fuzzy compensation control rules
每條規則都有一個模糊關系Ri,系統的模糊關系可以表示為
(15)
根據上述模糊補償控制規則,對電阻爐溫度控制系統的性能進行模糊推算,從而得到模糊輸出.
由于Smith預估補償對模型偏差比較敏感,為了消除模型參數不匹配的影響,通過在模糊Smith補償模型的基礎之上附加除法器環節、乘法器環節和前導微分環節來對其增益進行自適應補償[12],其原理如圖2所示.這三個環節共同作用,由補償模型與信號之間的偏差得到用于校正預估的增益,實現自適應調整的作用,能夠消除穩態偏差.
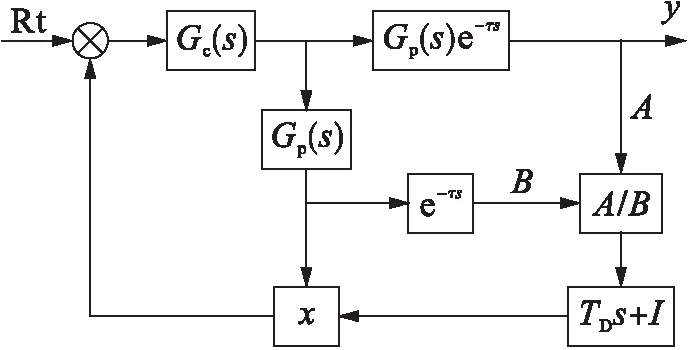
圖2 自適應的預估補償Fig.2 Adaptively predictive compensation
3 實驗結果及分析
為了驗證本文方法的合理性和有效性,在設計的ARM嵌入式溫度控制系統上開展實驗,并且與傳統PID控制算法和文獻[1]的模糊PID控制算法進行了比較分析.
在100 ℃的初始溫度條件下,設定控制的目標溫度值分別為500和800 ℃,得到了傳統PID控制算法、文獻[1]的模糊PID控制算法和本文方法的溫度控制實驗結果曲線分別如圖3、4所示.根據圖中所示的曲線,本文提出的基于神經網絡的PID控制+模糊Smith預估補償的自適應方法能夠將溫度控制到期望值.在目標溫度為500 ℃的實驗中,本文方法得到的調節時間約為390 s,控制精度約為±0.5 ℃,超調量接近于0,而模糊PID控制算法和傳統PID控制算法得到的收斂時間、控制精度和超調量分別為410 s、±0.8 ℃、20%,570 s、±1.5 ℃、45%;在目標溫度為800 ℃的實驗中,本文方法得到的收斂時間約為440 s,控制精度約為±0.6 ℃,超調量趨近于0,而模糊PID控制算法和傳統PID控制算法得到的收斂時間、控制精度和超調量分別為450 s、±1 ℃、25%,650 s、±1.8 ℃、48%.
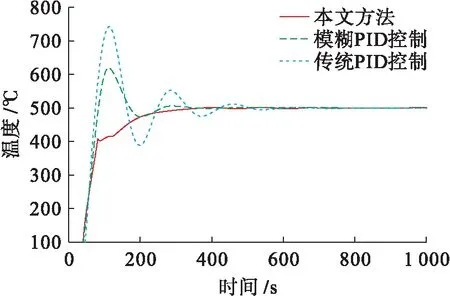
圖3 500 ℃目標溫度時三種方法的實驗結果Fig.3 Experimental results using three methods at target temperature of 500 ℃
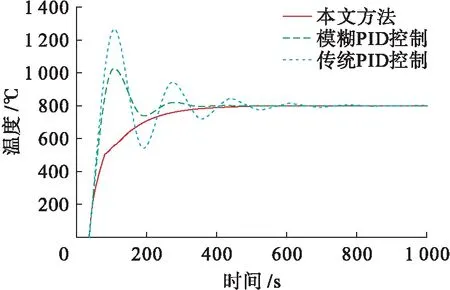
圖4 800 ℃目標溫度時三種方法的實驗結果Fig.4 Experimental results using three methods at target temperature of 800 ℃
對實驗結果進行對比分析,可以發現模糊PID控制和傳統PID控制均存在精度不高、超調量較大、調節時間較長的問題,而本文方法則可以克服系統的時滯和慣性影響,實現溫度的快速、準確和穩定控制.
4 結 論
針對電阻爐溫度控制系統普遍存在超調量大和調節時間長等問題,本文設計了基于ARM嵌入式的自適應溫控系統,利用基于神經網絡的PID控制算法來實現溫度的準確控制,提出了基于模糊Smith的預估補償控制方法來消除系統純滯后的影響.實驗結果表明,該方法可以克服系統的時滯和慣性等因素,從而實現溫度的準確控制,相對于模糊PID和傳統PID控制,本文方法在系統超調和調節時間兩方面均有極大提高,系統穩定性更好,具有更好的推廣應用前景.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(2018年2期)2018-04-18 12:18:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
電鍍與環保(2016年3期)2017-01-20 08:15:32