
轉(zhuǎn)向傳動(dòng)比波動(dòng)的對稱性研究
2020-08-03 13:22:02谷玉川王祥徐帆周建根
汽車零部件 2020年7期
關(guān)鍵詞:設(shè)計(jì)
谷玉川,王祥,徐帆,周建根
(廣州汽車集團(tuán)股份有限公司汽車工程研究院,廣東廣州 511434)
0 引言
轉(zhuǎn)向傳動(dòng)比波動(dòng)是乘用車轉(zhuǎn)向系統(tǒng)布置和設(shè)計(jì)的重要指標(biāo)。主要影響轉(zhuǎn)向過程中駕駛員轉(zhuǎn)向力的波動(dòng)、轉(zhuǎn)向響應(yīng)的線性度、轉(zhuǎn)向力反饋和轉(zhuǎn)向響應(yīng)的對稱性。傳動(dòng)比波動(dòng)是因?yàn)檗D(zhuǎn)向傳動(dòng)軸一般采用雙不等速萬向節(jié),由于空間布置角度的限制,造成轉(zhuǎn)向盤到轉(zhuǎn)向器小齒輪軸傳動(dòng)比的周期性波動(dòng)[1]。當(dāng)波動(dòng)較大,且相對直線行駛位置不對稱時(shí),中高車速直線行駛工況,會(huì)造成中心區(qū)左、右轉(zhuǎn)向力建立的不對稱,嚴(yán)重的會(huì)造成左、右轉(zhuǎn)向響應(yīng)的不對稱,增加駕駛員負(fù)擔(dān),影響用戶體驗(yàn)。
這里要糾正一個(gè)概念:過往的研究成果中也多以“力矩波動(dòng)”來等效傳動(dòng)比波動(dòng)[2],作為優(yōu)化的對象,對于非動(dòng)力轉(zhuǎn)向系統(tǒng)和齒條助力式轉(zhuǎn)向系統(tǒng),這個(gè)等效是成立的。而對于國內(nèi)廣泛應(yīng)用的管柱助力式動(dòng)力轉(zhuǎn)向系統(tǒng),由于助力分擔(dān)了一部分轉(zhuǎn)向阻力,實(shí)際反映到駕駛員的力矩波動(dòng)是小于傳動(dòng)比波動(dòng)的。低車速時(shí),助力增益很高,力矩波動(dòng)遠(yuǎn)小于傳動(dòng)比波動(dòng);中高車速中心區(qū)轉(zhuǎn)向時(shí),隨著助力增益的降低,力矩波動(dòng)接近傳動(dòng)比波動(dòng)。因此無論哪種助力形式的轉(zhuǎn)向系統(tǒng),相對于低車速而言,中高車速左、右轉(zhuǎn)向力建立的對稱性,甚至響應(yīng)對稱性更應(yīng)當(dāng)被重視。
目前比較通用的做法是:在單車型開發(fā)過程中,通過優(yōu)化轉(zhuǎn)向傳動(dòng)軸節(jié)叉相位角,降低傳動(dòng)比波動(dòng)的幅值;若不滿足設(shè)計(jì)要求時(shí),可以綜合優(yōu)化轉(zhuǎn)向系統(tǒng)硬點(diǎn)和傳動(dòng)軸相位角來滿足設(shè)計(jì)要求,目的是將轉(zhuǎn)向過程中轉(zhuǎn)向力的波動(dòng)控制在較低水平。此時(shí),中心區(qū)的轉(zhuǎn)向力建立即使存在不對稱,由于波動(dòng)幅值較低,難以察覺。隨著消費(fèi)者個(gè)性化需求的增長,要求車型更新迭代速度的不斷加快,整車特別是模塊化底盤開發(fā)的必要性日益凸顯。那么,在模塊化底盤開發(fā)過程中,轉(zhuǎn)向系統(tǒng)硬點(diǎn)需要適應(yīng)底盤模塊所重構(gòu)的多個(gè)車型的人機(jī)布置需求,并保持轉(zhuǎn)向零件的高沿用性。此時(shí),難以將所有車型的傳動(dòng)比波動(dòng)都控制在較低水平。合適的傳動(dòng)比波動(dòng)和對稱性設(shè)計(jì)目標(biāo)則能夠用更少甚至一套轉(zhuǎn)向機(jī)和轉(zhuǎn)向管柱核心部件,支撐一系列車型的底盤模塊化開發(fā)[3]。
1 轉(zhuǎn)向傳動(dòng)比波動(dòng)
乘用車的轉(zhuǎn)向盤到小齒輪之間一般由兩個(gè)或更多的十字軸萬向節(jié)相連,耦合兩者之間的角度和扭矩矢量。這種萬向節(jié)的不等速特性和傳動(dòng)軸的空間位置決定了傳動(dòng)比波動(dòng)的特性。圖1為轉(zhuǎn)向傳動(dòng)軸的空間位置示意圖[4]。其中,φ1為輸入軸轉(zhuǎn)角,即方向盤轉(zhuǎn)角;φ2為輸出軸轉(zhuǎn)角,即轉(zhuǎn)向器小齒輪軸轉(zhuǎn)角;α1、α2分別是輸入軸和輸出軸與傳動(dòng)軸線夾角;p1、p2分別是輸入軸和輸出軸與傳動(dòng)軸線構(gòu)成的平面;β為p1、p2間的夾角;γ為傳動(dòng)軸兩節(jié)叉平面間的夾角,即相位角。
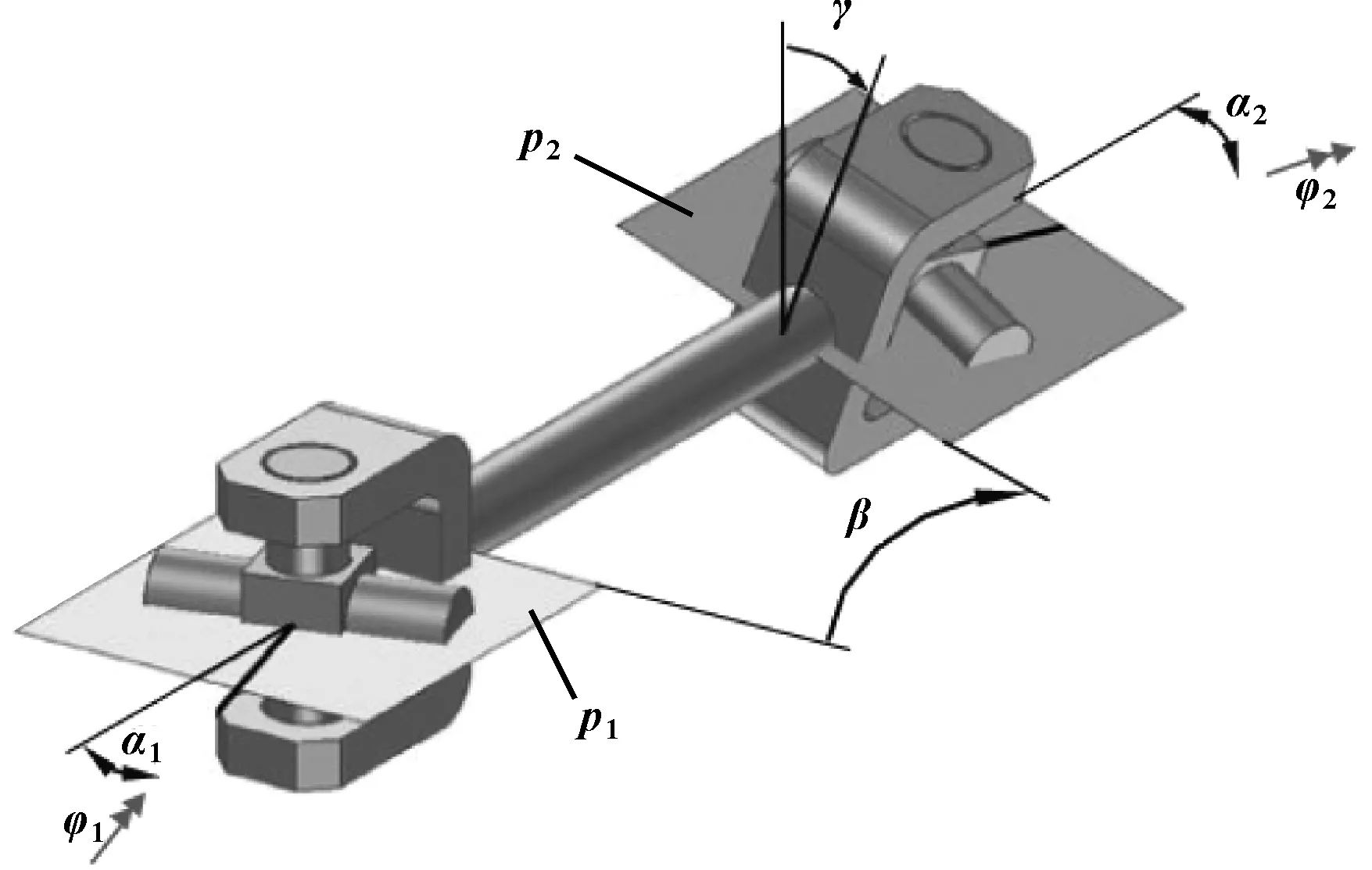
圖1 轉(zhuǎn)向傳動(dòng)軸的空間位置示意
輸出軸與輸入軸的轉(zhuǎn)角在轉(zhuǎn)向過程中的關(guān)系為
tanφ2=
(1)
由此計(jì)算某左舵車型轉(zhuǎn)向系統(tǒng)硬點(diǎn)下,傳動(dòng)比隨轉(zhuǎn)向盤轉(zhuǎn)角波動(dòng)的特性如圖2所示。
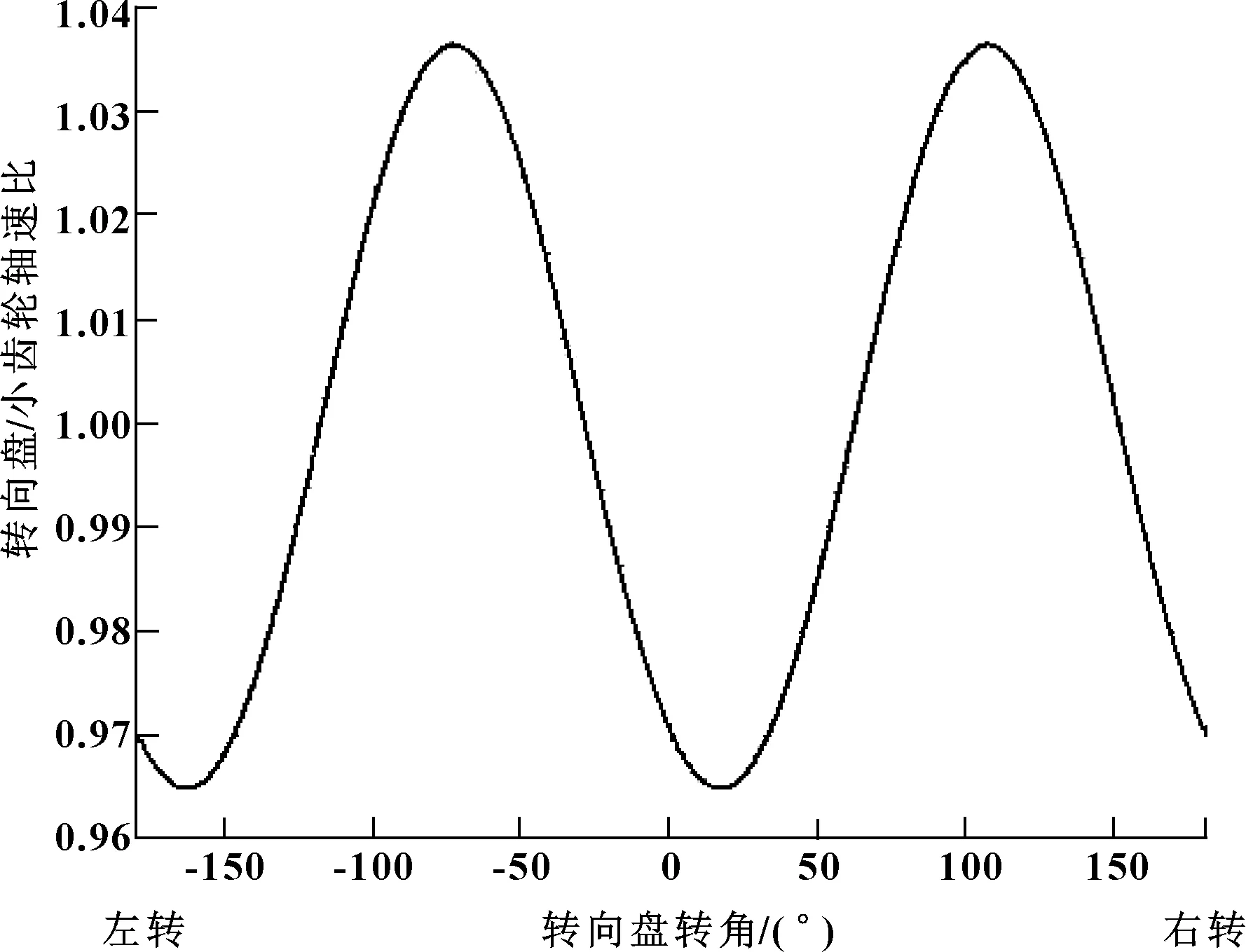
圖2 傳動(dòng)比波動(dòng)隨方向盤轉(zhuǎn)角的變化
可以看到,當(dāng)車輛直線行駛時(shí),若將輸出軸節(jié)向左旋轉(zhuǎn)74°時(shí),傳動(dòng)比波動(dòng)位于峰值,這會(huì)進(jìn)一步強(qiáng)化力矩反饋的中心感,但是會(huì)降低中心區(qū)的最小轉(zhuǎn)向靈敏度,增加響應(yīng)死區(qū);相反,若將輸出軸節(jié)叉向左旋轉(zhuǎn)16°時(shí),傳動(dòng)比波動(dòng)位于谷值,最小轉(zhuǎn)向靈敏度會(huì)提高,死區(qū)減小,但是中心感則會(huì)弱化。在實(shí)際設(shè)計(jì)過程中,可以根據(jù)整車性能目標(biāo)定位進(jìn)行直行時(shí)波動(dòng)峰谷值選擇。例如:現(xiàn)代汽車設(shè)計(jì)的車輪定位參數(shù)能保證足夠的中心感,則可以通過中間谷值的設(shè)計(jì)改善中心區(qū)轉(zhuǎn)向響應(yīng);若車輛定位偏舒適的風(fēng)格,則可以通過中間峰值的設(shè)計(jì)降低中心區(qū)響應(yīng)的最小靈敏度,同時(shí)加強(qiáng)中心區(qū)的路感反饋。若輸出軸節(jié)叉平面與平面B的轉(zhuǎn)角不被控制,則會(huì)在左、右轉(zhuǎn)向時(shí),造成一定程度的傳動(dòng)比差異,進(jìn)而引起轉(zhuǎn)向力建立的不對稱,嚴(yán)重的會(huì)導(dǎo)致轉(zhuǎn)向響應(yīng)的不對稱。
2 傳動(dòng)比對稱性的評價(jià)指標(biāo)
2.1 傳動(dòng)比梯度
在轉(zhuǎn)向系統(tǒng)設(shè)計(jì)迭代過程中,為了控制轉(zhuǎn)向盤中位時(shí),左、右傳動(dòng)比波動(dòng)的對稱性,需要建立相應(yīng)的評價(jià)指標(biāo),實(shí)現(xiàn)對這一性能的量化管控。文中創(chuàng)新性地提出了“0°處傳動(dòng)比梯度”這一指標(biāo),該指標(biāo)表示轉(zhuǎn)向盤到轉(zhuǎn)向器輸入軸傳動(dòng)比波動(dòng)曲線上,轉(zhuǎn)向盤角度為0°時(shí)斜率的絕對值。由于該斜率值較低,將等效的度量范圍增加至100°,因此該指標(biāo)的單位為1/100°。圖3所示是圖2的傳動(dòng)比梯度隨轉(zhuǎn)向盤轉(zhuǎn)角特性。0°處傳動(dòng)比梯度為0.065/100°。
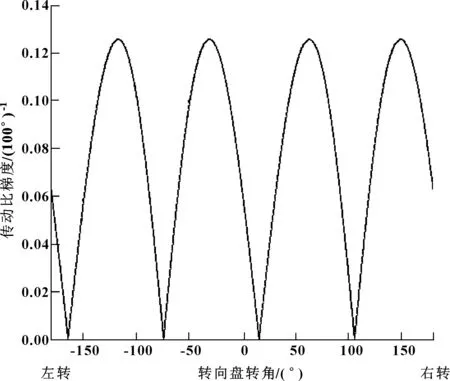
圖3 不同初始相位方案的傳動(dòng)比波動(dòng)
2.2 傳動(dòng)比梯度的影響因素
由于該指標(biāo)最終是通過式(1)的特性處理而來,傳動(dòng)比梯度與三根軸線(輸入節(jié)叉軸、傳動(dòng)軸、輸出節(jié)叉軸)的空間位置、傳動(dòng)軸相位角和輸出節(jié)叉軸初始角度相關(guān)。其中,三根軸線的空間位置和傳動(dòng)軸相位角均是優(yōu)化傳動(dòng)比波動(dòng)幅值的設(shè)計(jì)變量,輸出節(jié)叉軸初始角度,則是優(yōu)化傳動(dòng)比梯度的重要甚至是唯一可行的變量。圖4(a)和(b)分別為某車型轉(zhuǎn)向盤不同上下調(diào)節(jié)位置處(-2.5°,-1.25°,0°,1.25°和2.5°,其中0°為設(shè)計(jì)初始位置)的傳動(dòng)比波動(dòng)和傳動(dòng)比梯度隨轉(zhuǎn)向盤轉(zhuǎn)角變化曲線。在不同的調(diào)節(jié)位置,傳動(dòng)比波動(dòng)和梯度均變化顯著。即使調(diào)節(jié)范圍的中間位置可以將波動(dòng)幅值做到很小,但是在其他位置,仍然會(huì)出現(xiàn)波動(dòng)幅值較大的現(xiàn)象,這進(jìn)一步說明了在轉(zhuǎn)向盤上下調(diào)節(jié)全行程內(nèi)考慮控制傳動(dòng)比梯度的重要性。
2.3 輸出軸節(jié)叉初始角度的控制
顯然,控制車輛直行時(shí)的輸出節(jié)叉初始角度就可以在得到不同降低此時(shí)的傳動(dòng)比梯度,提高左、右轉(zhuǎn)向時(shí)的力反饋和響應(yīng)對稱性。進(jìn)一步地,需要兼顧必要的設(shè)計(jì)條件,通過控制小齒輪的初始轉(zhuǎn)角來是實(shí)現(xiàn)這一要求:
(1)傳動(dòng)軸的輸出節(jié)叉與轉(zhuǎn)向器小齒輪軸在圓周方向上具備唯一的裝配位置,這可以通過圖5所示的具有周向定位功能(花鍵+限位平面)的連接方式來保證。
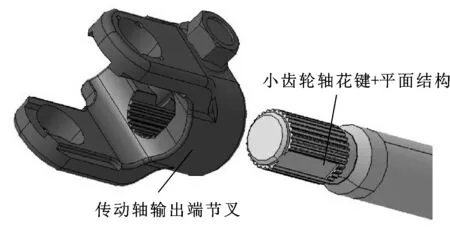
圖5 用于限制節(jié)叉與小齒輪軸裝配位置的結(jié)構(gòu)
(2)轉(zhuǎn)向器齒條中位時(shí),小齒輪軸的特殊花鍵在旋轉(zhuǎn)方向上具備唯一的裝配位置,控制車輛直行時(shí)的輸出節(jié)叉軸的絕對位置;
(3)在整車生產(chǎn)的四輪定位環(huán)節(jié),需保證轉(zhuǎn)向盤左、右行程對稱。
3 加權(quán)傳動(dòng)比梯度
傳動(dòng)比梯度僅表明了特定調(diào)節(jié)位置下的波動(dòng)對稱性,由圖4所示可知,傳動(dòng)比波動(dòng)和梯度隨方向盤上下調(diào)節(jié)會(huì)產(chǎn)生變化。因此為了兼顧優(yōu)化不同調(diào)節(jié)位置的傳動(dòng)比梯度,需要定義一個(gè)加權(quán)傳動(dòng)比梯度指標(biāo),用于最終確定直線行駛時(shí)的小齒輪軸初始角度。
在汽車人機(jī)工程設(shè)計(jì)中,通常用5百分位女子和95百分位男子人體模型的舒適坐姿生成手抓參考點(diǎn),用于轉(zhuǎn)向盤調(diào)節(jié)范圍的設(shè)計(jì)和校核,可滿足95%人體模型的需求。文中所關(guān)注的轉(zhuǎn)向盤上下調(diào)節(jié)范圍,與人體模型的軀干尺寸相關(guān)性較高:例如95百分位男子的人體模型中,軀干尺寸越大,手抓點(diǎn)越靠近調(diào)節(jié)上邊界;軀干尺寸越小,手抓點(diǎn)越靠近調(diào)節(jié)下邊界。該趨勢對于其他百分位及國外人體模型也適用[5]。
因此,認(rèn)為轉(zhuǎn)向盤上下調(diào)節(jié)位置是與人體軀干尺寸相關(guān)的一維情況[6]。即不同駕駛員轉(zhuǎn)向盤上下調(diào)節(jié)位置的分布符合正態(tài)分布,且主要集中在中間位置,超出上、下調(diào)節(jié)極限的比例各為2.5%。將人機(jī)設(shè)計(jì)的上下調(diào)節(jié)范圍進(jìn)行歸一化處理,以[-1,1]表示下極限到上極限的調(diào)節(jié)范圍。此時(shí),各調(diào)節(jié)位置的使用概率密度服從N(0,0.510 22)分布。不同調(diào)節(jié)位置的概率密度以及低于該調(diào)節(jié)位置的概率如圖6所示。即在上、下調(diào)節(jié)極限之間的使用概率為95%,符合人機(jī)校核原則。
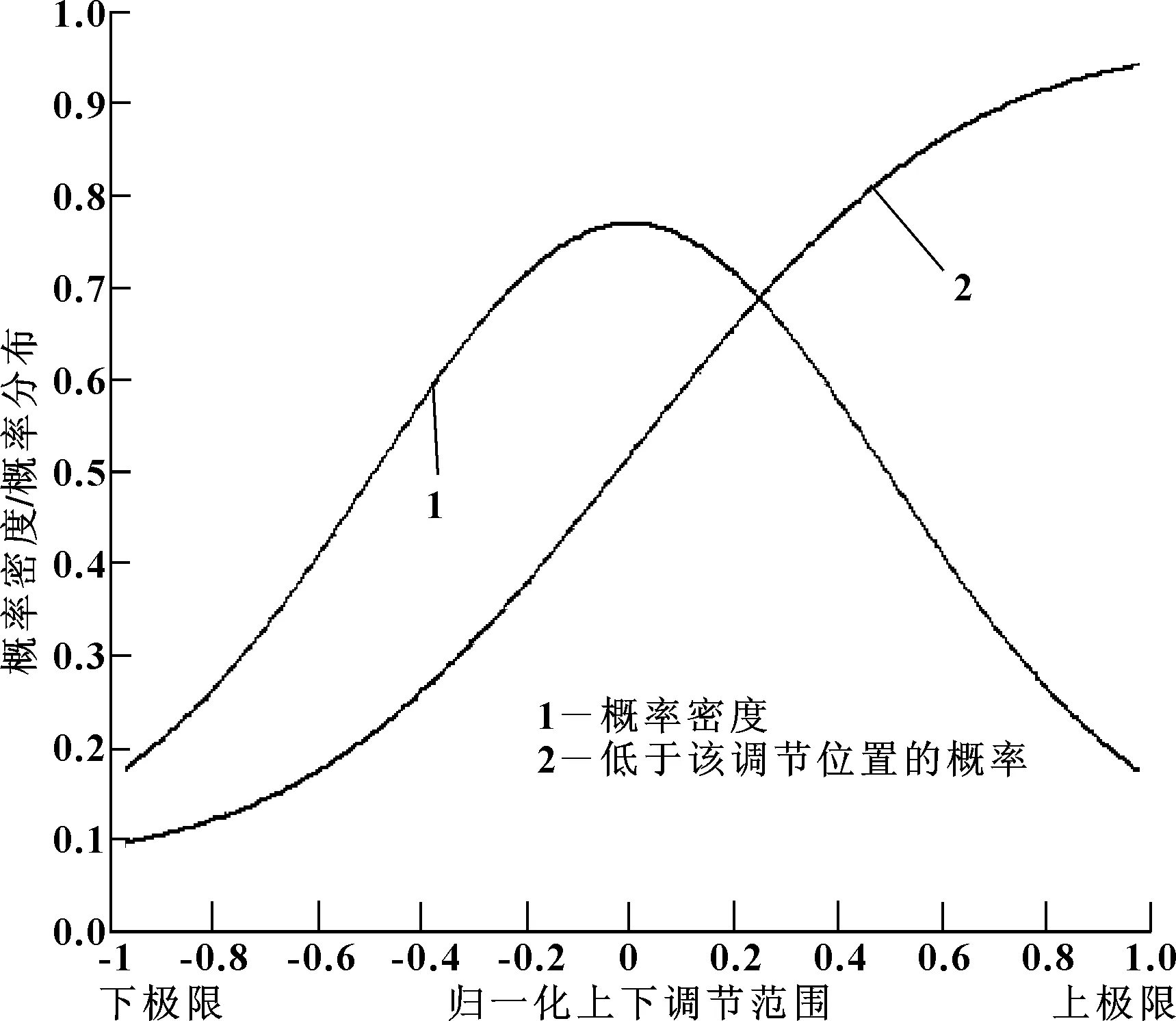
圖6 不同調(diào)節(jié)位置的概率密度及概率分布
為了簡化加權(quán)傳動(dòng)比梯度的計(jì)算,以歸一化后5個(gè)調(diào)節(jié)位置[-1,-0.5,0,0.5,1]的傳動(dòng)比梯度為樣本,各調(diào)節(jié)位置對應(yīng)的加權(quán)系數(shù)分別為-0.75以下的概率,-0.75~-0.25間的概率,-0.25~0.25間的概率,0.25~0.75間的概率和0.75以上的概率。加權(quán)傳動(dòng)比梯度的計(jì)算如公式(2)所示。
Gweighted=0.070 8g-1+0.241 3g-0.5+0.375 8g0+0.241 3g0.5+
0.070 8g1
(2)
式中:Gweighted為加權(quán)傳動(dòng)比梯度,g-1~g1分別表示[-1,-0.5,0,0.5,1] 5個(gè)調(diào)節(jié)位置下的傳動(dòng)比梯度。
將圖4 (b)用公式(2)處理后,可得圖7所示的加權(quán)傳動(dòng)比梯度隨轉(zhuǎn)向盤轉(zhuǎn)角的特性。
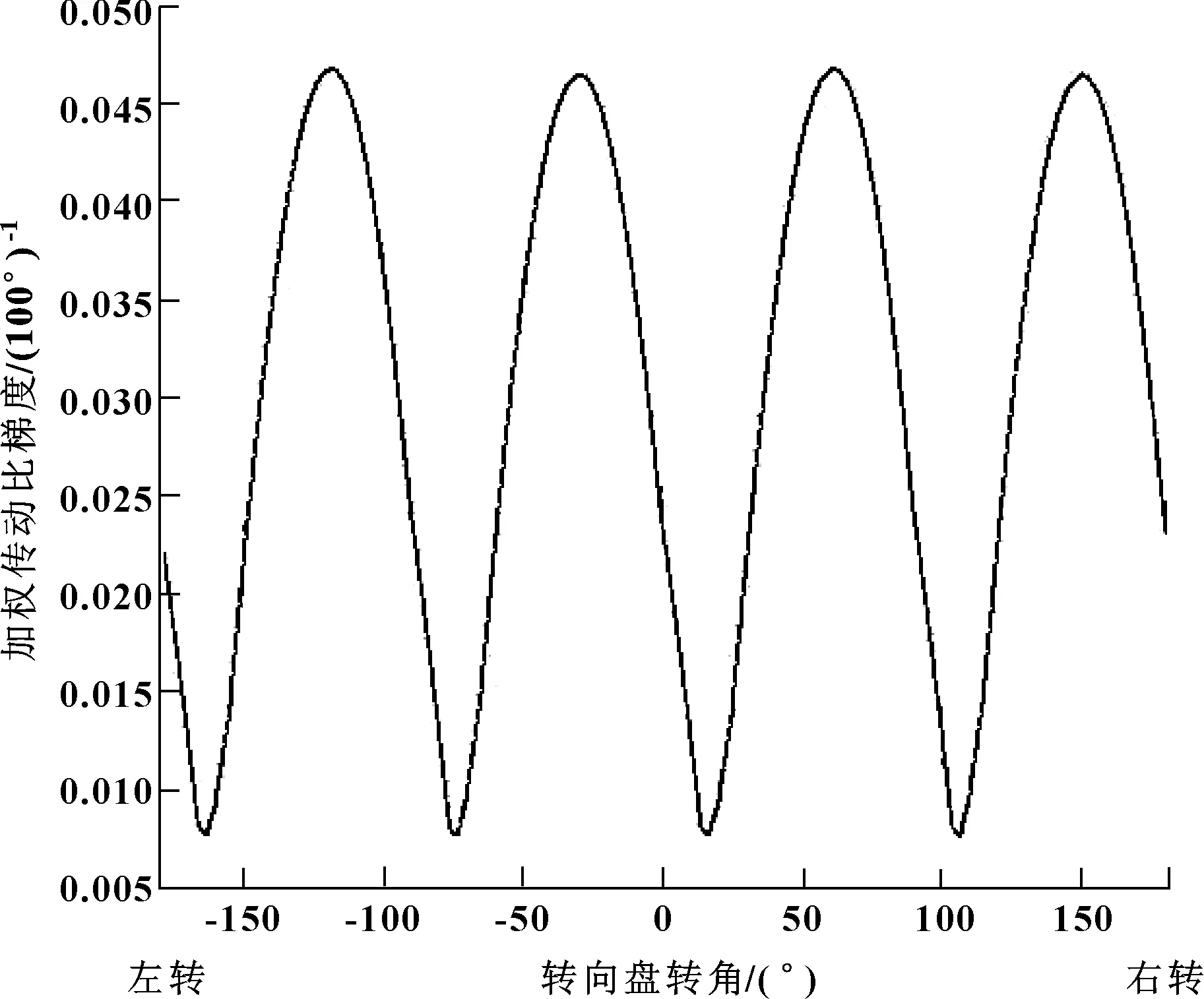
圖7 加權(quán)傳動(dòng)比梯度
顯然,加權(quán)后的傳動(dòng)比梯度可以清晰地量化圖4 (b)中不同調(diào)節(jié)位置的綜合影響。對于該車型的轉(zhuǎn)向系統(tǒng)設(shè)計(jì)來說,將轉(zhuǎn)向傳動(dòng)軸輸出節(jié)叉平面以圖1中的p2平面為基準(zhǔn),逆時(shí)針轉(zhuǎn)動(dòng)16.7°時(shí),轉(zhuǎn)向盤在各個(gè)調(diào)節(jié)位置的加權(quán)傳動(dòng)比梯度最小。
4 結(jié)束語
文中提出了考察轉(zhuǎn)向系統(tǒng)傳動(dòng)比波動(dòng)對稱性的評價(jià)指標(biāo),即轉(zhuǎn)向盤“0°處傳動(dòng)比梯度”;說明了通過控制轉(zhuǎn)向傳動(dòng)軸輸出節(jié)叉周向絕對位置的一種方法,實(shí)現(xiàn)對該指標(biāo)的控制。在考慮轉(zhuǎn)向盤上下調(diào)節(jié)過程對傳動(dòng)比對稱性的影響方面,又提出了基于人機(jī)布置概率密度的加權(quán)傳動(dòng)比梯度指標(biāo),進(jìn)一步明確了考慮方向盤上下調(diào)節(jié)時(shí)的傳動(dòng)比對稱性設(shè)計(jì)優(yōu)化目標(biāo)。
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
