履帶式綠籬機刀具架結構設計與有限元分析
2020-08-04 07:01:38王俊杰代帥威宋星亮司癸卯
筑路機械與施工機械化 2020年6期
關鍵詞:方向
王俊杰,代帥威,宋星亮,司癸卯
(長安大學 道路施工技術與裝備教育部重點實驗室,陜西 西安 710064)
0 引 言
隨著高速公路總里程和建設速度的加快,公路的綠化維護工作任務越來越重。在現有的綠化維護設備中,針對中心分隔帶和延路兩側綠化帶進行維護的設備較多,對于綠化面積和維護難度更大的沿路邊坡區和互通立交區,能應用的設備很少,一般由人工手持設備修剪。此類手持設備的動力源不環保,如柴油機,而且以高速旋轉的刀片為工作裝置,設備的噪聲和振動很大。其作業時產生的廢氣會損害人員的健康并污染環境。由于操作人員承受整機重量,加之綠化區多為斜面并且面積較大,因此操作工人負擔極大,難以保證修剪質量和修剪效率,嚴重影響了公路綠化養護效率。
自行式綠籬機是近期綠籬機發展的一種趨勢,一般由可自行移動的車體攜帶修剪裝置作業,根據是否需要人員隨車操控分為乘騎式和遙控式。乘騎式需操作人員隨車操作,雖在一定程度上提高了綠籬機的整體效率,但操作人員的工作環境依然較為惡劣,尤其是在溫度極端的天氣,對人員的身體健康危害較大。
遙控式綠籬機通過無線通信實現在場外對綠籬機的控制,提高了綠籬機的自動化程度,大幅提升了公路綠化維護的效率。因此遙控式綠籬機的研發有著很大的實用價值。
純電動履帶式遙控綠籬機是在現有綠籬機的基礎上研發的一種公路綠化維護設備,純電驅動的方式從根本上解決了環境污染問題。履帶車由永磁同步電機驅動,極大地降低了噪音和震動,電動推桿替代液壓缸在環保性上更有優勢。履帶底盤良好的通過性能提升了整機的地形適應能力,遙控操作方式無需在機身上設計操作室,降低了整車的重心,提升了整車在橫坡和縱坡上的穩定性。
履帶式綠籬機由行走裝置、修剪裝置和刀具架3部分組成。刀具架的作用是連接車架和修剪裝置,其設計不僅要考慮功能的實現,還要考慮強度和剛度的要求,刀具架的結構尺寸也會影響其他零部件的布置。刀具架與修剪裝置的連接對可靠性要求較高,且應便于多種刀具的更換,因此考慮使用螺栓鏈接,在保證連接可靠性的同時也便于刀具更換。刀具架除了具有連接作用外,另一個主要功能是調節修剪高度,設計應充分考慮升降動力裝置的結構和布置,整車擬采用純電動驅動,用電動推桿代替液壓缸驅動[1-2]升降裝置。修剪高度應能在0~20 cm內調節,當前修剪高度應能反饋到操作面板,高度的調節應達到要求的精度,作業時在負載的作用下修剪高度應能保持穩定,對調節速度無特殊要求[3]。
1 總體方案設計
純電動履帶式遙控綠籬機由行走裝置、修剪裝置和刀具架3部分組成。工作原理如下:行走裝置是橡膠履帶底盤,由于作業速度較低且對穩定性要求較高,因此采用剛性懸架。履帶底盤采用分布式驅動,2個永磁同步電機經輪邊減速器分別驅動兩側鏈輪,通過控制電機轉速來實現底盤的行走。修剪裝置包括修剪刀具、減速裝置和刀具電機等,通過控制刀具電機的轉速實現刀具轉速的調節,整個修剪裝置通過連接法蘭與刀具架螺栓連接,可以實現整個修剪裝置的快速更換。刀具架連接車架與修剪裝置,包括平行四邊形機構和電動推桿,通過控制電動推桿的伸縮調節修剪裝置與地面的距離,如圖1所示。

圖1 整體方案示意
2 刀具架結構方案
刀具架的作用是連接車架和修剪裝置,其設計不僅要考慮功能的實現,還要考慮強度和剛度的要求,刀具架的結構尺寸也會影響其他零部件的布置。刀具架除連接作用外,另一個主要功能是調節修剪高度,結構設計應充分考慮升降動力裝置的結構和布置,整車擬采用純電驅動,用電動推桿代替液壓缸作為升降裝置的驅動。
圖2是刀具架結構的2種設計方案,2種方案均采用連接法蘭與刀具連接,均使用電動推桿作為升降動作的執行機構。方案1優勢是結構簡單,整體結構強度高,不易發生變形;缺點是在調節高度時,刀具與地面的角度也會變化,這樣就無法保持修剪質量。方案2使用平動連桿結構,使得刀具可以平上平下運動,最大程度保證了修剪質量,刀具高度可調節范圍也比方案1更大;方案2的缺點是結構較為復雜,零部件較多,多鉸接的結構受力性能較差,對零部件尺寸要求嚴格。對比2種方案,方案2雖然結構較復雜,受力性能較差,但刀具可平動調節高度,有利于修剪質量的提高,受力性能也可通過零部件的設計來改善,因此刀具架結構設計方案采用方案2。

圖2 刀具架的2種結構方案
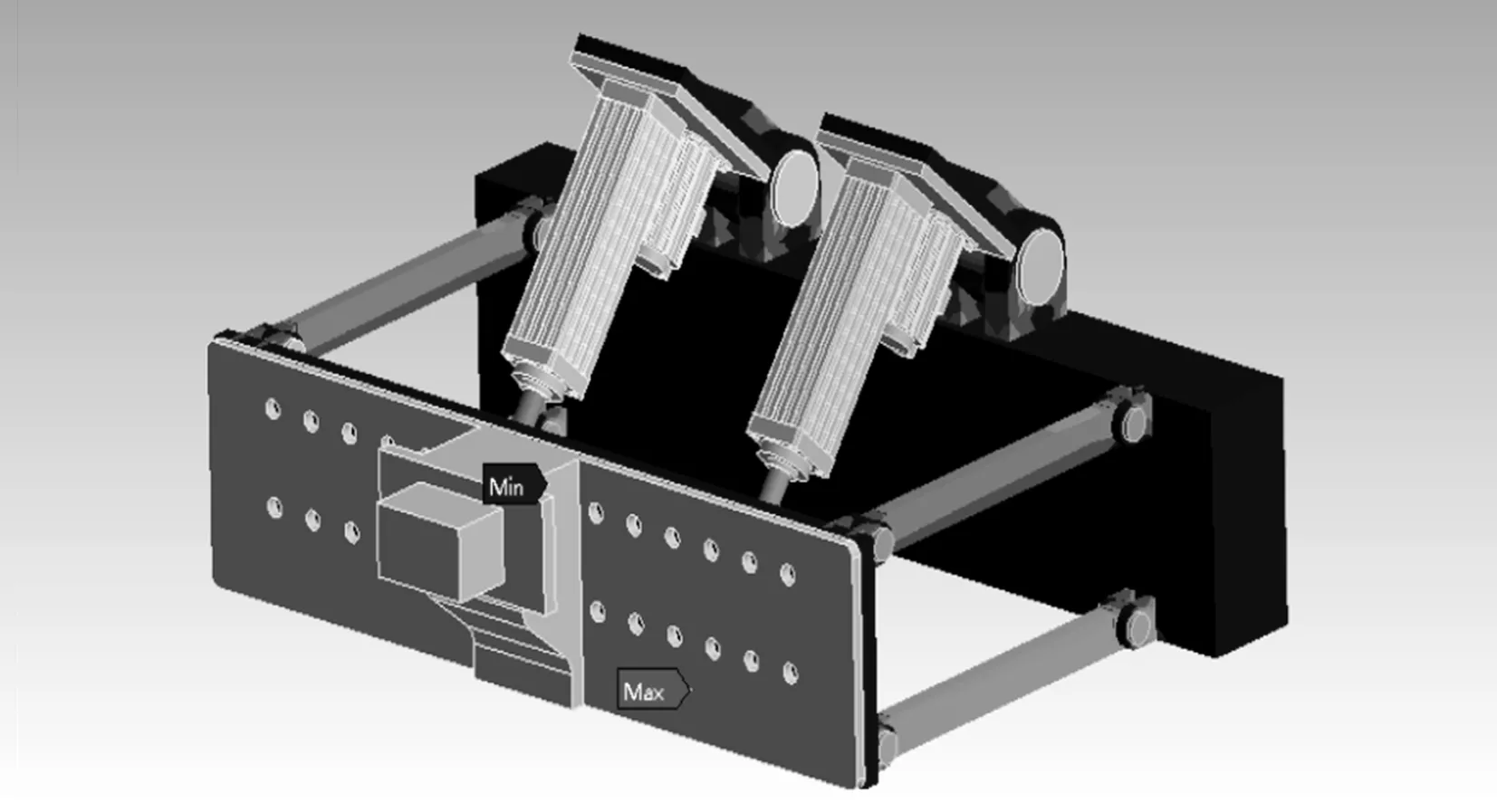
刀具架由連桿和電動推桿組成,連桿是刀具架的主要承載結構,電動推桿一端與修剪裝置鉸接,另一端通過底座與車體鉸接,電動推桿運動時,修剪裝置在平行四邊形結構的限制下做上下平動[4]。如圖3所示。

圖3 刀具架結構方案
車體建模完成之后就確定了刀具架與車體鉸接點的位置,在高度調節過程中[5],修剪裝置不僅有垂直方向的位移,還有水平方向的位移,即修剪裝置在高位時與車體距離最近,在中位時與車體距離最遠。為使整機結構盡可能緊湊,減小整體尺寸,連桿不應過長,根據修剪裝置距履帶的最小距離,可初步確定連桿的長度;根據修剪裝置的尺寸確定連桿鉸接點間距;初步對電動推桿的選型可確定其底座尺寸。
3 刀具架結構受力分析
刀具架是承載修剪裝置重力的關鍵部件,其強度和剛度將影響整機的穩定性和可靠性[6]。對刀具架進行受力分析不僅可以檢驗方案的合理性,受力分析結果也是后續連桿設計和電動推桿選型的依據。刀具架是一個多鉸點的空間結構,兩端是完全對稱的,因此可以將刀具架受力情況歸結于平面力系范圍[7],如圖4所示。

圖4 刀具架受力分析
平面力系中通常將單一零件作為受力分析的對象,對某一分析對象求解完成后,其他各零件受力均可據此求出。電動推桿和其底座通過螺栓連接,可以看做1個分析對象,因此刀具架結構共有4個分析對象,修剪裝置、上連桿、下連桿和電動推桿。修剪裝置所受的力共有5個:修剪裝置自重載荷F、修剪阻力Ff、上連桿支座力Fa、下連桿支座力Fb和電動推桿支座力Fc。通常情況下支座力需要等效為垂直和水平方向的2個分力,但是通過分析可知上下連桿和電動推桿均為二力桿,他們所受力的方向只能沿著兩端鉸點的連線方向。因此可假設上下連桿和電動推桿均受拉力,方向沿構件鉸點連線方向向左,支座力則與二力桿受力大小相等,方向相反。修剪裝置在5個力的作用下平衡,分別在水平方向,垂直方向、對E點的合力矩列出其平衡方程[8]。
通過分析可知,刀具架處于水平之下(0≤a≤100 mm)和水平之上(100 圖5 刀具架不同狀態示意 列出2種狀態下的平衡方程為: 0≤a≤100 mm (1) 100 (2) 式中:Fa為上連桿支座力;Fb為下連桿支座力;Fc為電動推桿支座力;Ff為修剪阻力;F為修剪裝置自重載荷;α為下連桿與水平方向的夾角;θ為電動推桿與水平方向的夾角。式(1)中當0≤a≤100 mm時,∑Fx為水平方向的合力,假設向右為正方向;∑Fy為豎直方向的合力,假設向下為正方向;∑ME為對E點的合力矩,假設逆時針為正方向;式(2)中當100≤a≤200 mm時,∑Fx為水平方向的合力,假設向右為正方向;∑Fy為豎直方向的合力,假設向下為正方向;∑ME為對E點的合力矩,假設逆時針為正方向。 在Matlab中建立α、θ與a的關系,利用Matlab中的Solve函數求解式(1)、(2),這樣就可得到與a一一對應的支座力結果,結果如圖6所示。 圖6 受力計算分析結果 由圖6和表1可知上連桿支座力和電動推桿支座力方向與假設方向相同,下連桿支座力方向與假設相反,即刀具與地面高度在0~200 mm內變化時,上連桿和電動推桿始終受拉力,下連桿始終受壓力。上連桿在刀具高度為0 mm時所受拉力最大為9 693.1 N,下連桿在刀具高度為100 mm時所受壓力最大為17 472.4 N。 表1 受力分析關系表 根據受力分析結果對連桿進行設計,連桿截面通常可分為圓形截面和矩形截面,圓形截面承載性能優于矩形截面,但是考慮到圓形截面連桿在兩端鉸鏈處的加工難度大,選用矩形截面。連桿材料選45號鋼[9]。按照拉壓受力情況和壓桿穩定條件對連桿進行設計,最終得出連桿截面尺寸為b×h=35 mm×15 mm。 電動推桿是刀具架的動力裝置,是實現刀具高度調節的重要部件,不僅要滿足拉力的要求,還要滿足調節速度和安裝位置的要求,因此選擇電動推桿時要考慮其負載情況和安裝要求。由圖4可知,電動推桿所受軸向力與其支座力有如下關系 (3) 式中:Fd為電動推桿軸向力;Fc為電動推桿支座力;γ為電動推桿軸與其支座力夾角。 同樣是關于刀具高度a的函數,因此也是關于a的函數,其關系如圖7 所示。 圖7 電動推桿軸向力與刀具高度的關系 可以看出電動推桿軸向力在刀具高度為100 mm時達到最大為8 694.8 N,最小拉力為4 247.6 N。在刀具各位置下電動推桿均受拉力,因此在刀具高度上調時電動推桿是正負載工作,在刀具高度下調時是零負載工作,在選型時不能以推力為選型依據,而應該以拉力為選型依據。 如圖4所示,電動推桿總長度,即支座C到電動推桿底座的垂直距離是關于a的函數,由其長度最大值和最小值確定電動推桿的位移。電動推桿總長與刀具高度的關系如圖8所示。 圖8 電動推桿總長與刀具高度的關系 從圖中可以看出電動推桿總長最大值為492.5 mm,最小值為393.1 mm,因此可以確定電動推桿行程為100 mm。根據受力分析結果可確定電動推桿的最大軸向力和電動推桿的行程,根據最大推力和行程選取電動推桿,具體參數見表2。 表2 電動推桿參數 在Solidworks中對刀具架進行建模,如圖9所示,對結構簡化后進行有限元分析。本次分析的對象是刀具架的裝配體,且部分零件較為復雜,因此需要對模型進行簡化和等效處理,處理如下。 圖9 刀具架三維模型 (1)銷軸的簡化。刀具架中連桿與車架和刀具連接板連接處均使用的是銷軸,銷的尺寸一般較小,結構為非規則結構,無法劃分出高質量網格,并且影響接觸的設置。因此將銷軸簡化為兩端封閉的圓柱體。 (2)電動推桿內部的結構復雜,接觸對種類和數目繁多,不是本次分析研究的主要對象,因此將電動推桿簡化為2個零件:電缸和推桿,兩者之間為柱面接觸。 (3)所有零件的工藝性圓角或裝飾性圓角均忽略;忽略焊接對結構的影響;非主要受力部位的孔和槽結構忽略不計。 (4)本次分析中主要研究對象是刀具架,因此可以將其他結構和選型零部件設為剛體,不分析他們的變形,以加快計算速度。 對零件進行切分,對切分后的body運用體網格尺寸控制(Body Sizing)、面網格尺寸控制(Face Sizing)、邊界尺寸控制(Edge Sizing)和面網格(Face Meshing)等局部網格控制方法。組中得到網格數34 532個,節點數134 127個,平均網格質量為0.842,滿足靜力學有限元分析對網格質量的要求,網格劃分結果如圖10所示。刀具架所受載荷主要有2個,分別為(a)修剪裝置重力載荷:修剪裝置重力約為500 kg,取載荷系數為3,則修剪裝置重力載荷為14 700 N;(b)修剪阻力:根據經驗確定修剪阻力大小約為1 000 N。添加約束后進行求解。 圖10 網格劃分結果 圖11所示是刀具架的最大等效應力云圖,最大等效應力出現在電動推桿連接耳板處,最大等效應力不超過166 MPa,連桿上的最大等效應力不超過94 MPa;圖12所示為刀具架的總變形云圖,最大變形為0.3 mm。刀具架材料選用Q345鋼。靜力學分析結果中最大等效應力為166 MPa,小于材料的屈服強度265 MPa。 圖11 等效應力云圖 圖12 總變形云圖 本文討論了一種履帶式綠籬機刀具架的設計方案,對刀具架進行了受力分析,依據受力分析結果對連桿進行了設計,對電動推桿進行了選型,建立了刀具架的三維模型,對刀具架裝配體進行有限元分析。結果表明:履帶式綠籬機刀具架的強度滿足要求,變形量在可控范圍之內。論文對履帶式綠籬機刀具架結構設計提供了相關理論依據,設計方案可行,具有一定的工程應用價值。


4 電動推桿的計算選型



5 輪式底盤模塊車架的有限元分析



6 結 語
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42湘潮(上半月)(2022年5期)2022-12-06 03:02:28計算機應用(2022年2期)2022-03-01 12:33:42計算機應用(2022年1期)2022-02-26 06:57:42計算機應用(2021年4期)2021-04-20 14:06:36數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58計算機應用(2021年3期)2021-03-18 13:44:48計算機應用(2021年1期)2021-01-21 03:22:38數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50