卡爾曼濾波在光纖圍欄系統去噪中的應用
2020-08-04 16:20:35時帥肖寧
科技視界 2020年15期
時帥 肖寧

摘 要
提出一種基于卡爾曼濾波的統計學方法,對光纖圍欄系統的狀態進行實時估計并去除系統的噪聲,提高光纖圍欄系統的準確度。基于貝葉斯最大后驗概率(MAP)和最小均方誤差(MMSE)準則,通過新的測量值和量測更新方程修正后驗證狀態估計值。這種迭代的算法最終可以得到狀態的最優估計值。該方法應用到光纖圍欄系統中,實驗結果表明可有效地降低光纖圍欄的噪聲強度,提高擾動定位精度。
關鍵詞
卡爾曼濾波;光纖圍欄;去噪;定位
中圖分類號: TN967.1 ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A
DOI:10.19694/j.cnki.issn2095-2457.2020.15.010
Abstract
A statistical method based on Kalman filter(KF) is proposed to estimate the state of the optical fiber fence system in real time and remove the noise of the system,so as to improve the accuracy of the optical fiber fence system. Based on Bayesian Maximum Posterior Probability(MAP) and Minimum Mean Square Error(MMSE) criteria,the posterior state estimates are modified by new measurement values and measurement update equations.Finally,the optimal state estimation can be obtained by this iterative algorithm.The method is applied to the optical fiber fence system and the experimental results show that the noise intensity of the optical fiber fence can be effectively reduced and the positioning accuracy of the disturbance can be improved.
Key Words
Kalman filter;Fiber fence;Remove the noise;Positioning
0 引言
雖然基于光纖干涉原理的光纖圍欄具有靈敏度高、響應速度快和成本低等優點,但是也存在一個噪聲累加問題。當傳感光纜很長或傳感光纜所處的環境震動噪聲較大時,會造成檢測信號噪聲幅度很大,這對利用短時能量判斷光纖圍欄是否有振動發生的方法有很大影響。文獻[1-2]利用時間窗的小波變換的方法實現對光纖干涉信號進行實時濾波,盡管達到實時去噪的目的,但是會引入邊界問題。本文提出基于卡爾曼濾波器的自適應降噪算法,用于光纖圍欄的實時信號處理。對信號狀態進行了馬爾科夫建模,最后用實驗和結果驗證了算法的性能。
1 卡爾曼濾波
1.1 算法介紹
光纖圍欄中的噪聲可以看成加性噪聲,根據短時平穩特性,對采集的信號進行加窗分幀處理,每幀信號可看成平穩信號,其狀態按馬爾科夫(Markov)模型進行轉移,用高斯-馬爾科夫隨機過程建模。并用卡爾曼濾波器KF[3-4]估計出高斯-馬爾科夫隨機過程中的未知量。KF主要由狀態方程和測量方程通過迭代實現各時間點上的狀態值估計。
其中,K(k)是卡爾曼增益,確定卡爾曼增益的準則是使后驗誤差協方差陣極小。P(k)是估計的協方差矩陣,Q是過程噪聲協方差,R是測量噪聲協方差。用上面量測更新方程迭代地得到最大后驗概率分布和狀態的估計值。
1.2 參數初始化
將卡爾曼濾波器應用在光纖圍欄系統上,估計光纖上被測振動點的距離真實值。該距離是用高斯-馬爾科夫過程建模。給定系統參數初始值后由上述迭代方程實現卡爾曼濾波,狀態的初始值用第1s采集信號的平均值表示,由于迭代過程對誤差協方差初始值沒有嚴格的要求,設P(0)=1,過程噪聲協方差Q和測量噪聲協方差R可以測量得到。
2 實驗和討論
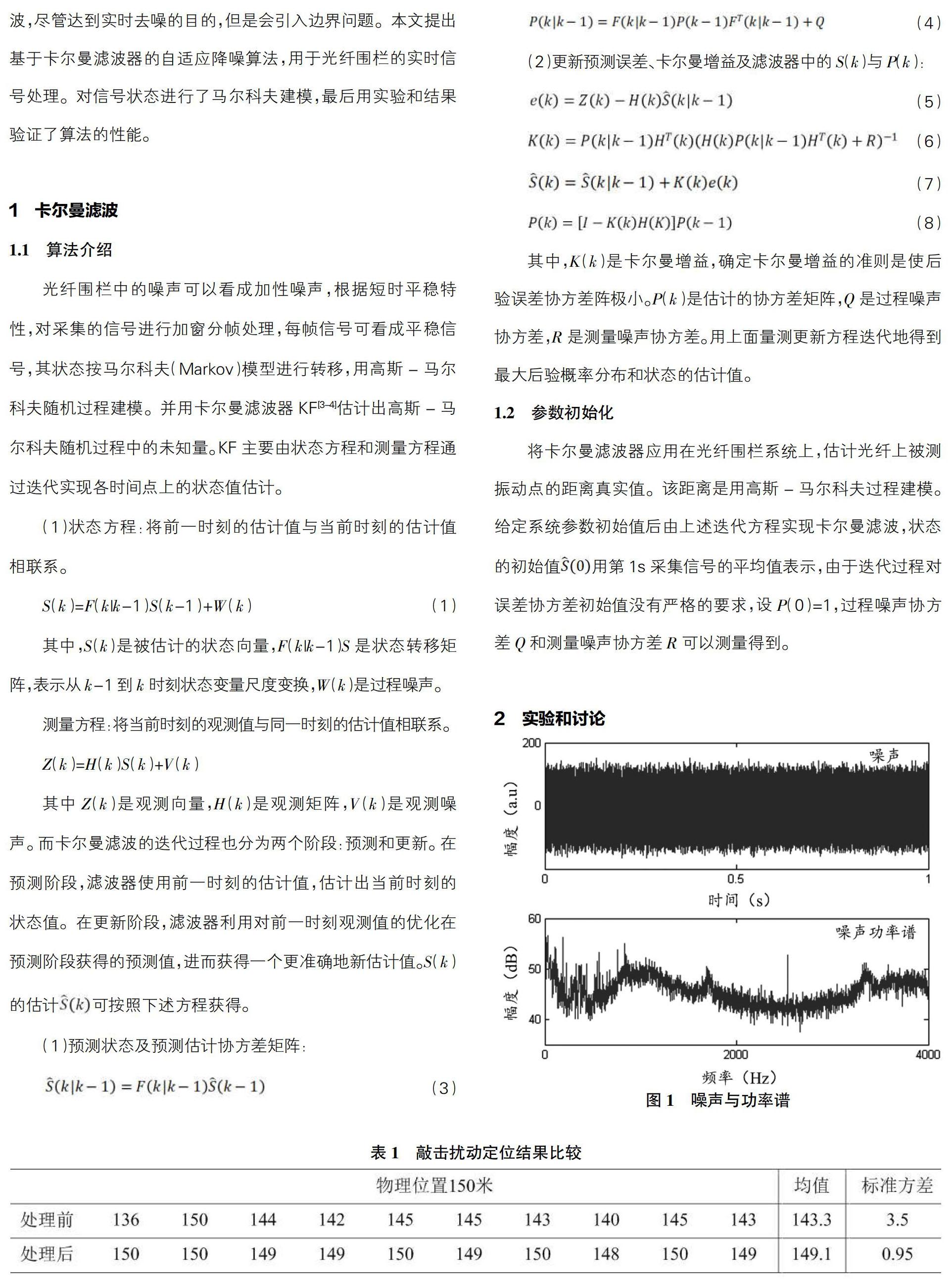
利用某單位內的光纖圍欄的真實數據來測試該算法的實際效果。該單位四周安裝防護網,高3m,周長約1km。傳感光纜按z字型被綁扎在防護網中部。傳感光纜長度近2km。光纖圍欄設備采用的是中國電子科技集團公司第三十四研究所的智能光纖周界警戒系統。取數據最前端時長1s的純噪聲數據做功率譜分析如圖1。從噪聲的功率譜可以看出,在有效頻帶內噪聲一種存在,如果使用固定頻率響應的濾波器對信號去噪處理很難達到理想的效果,必須使用自適應濾波器去噪。
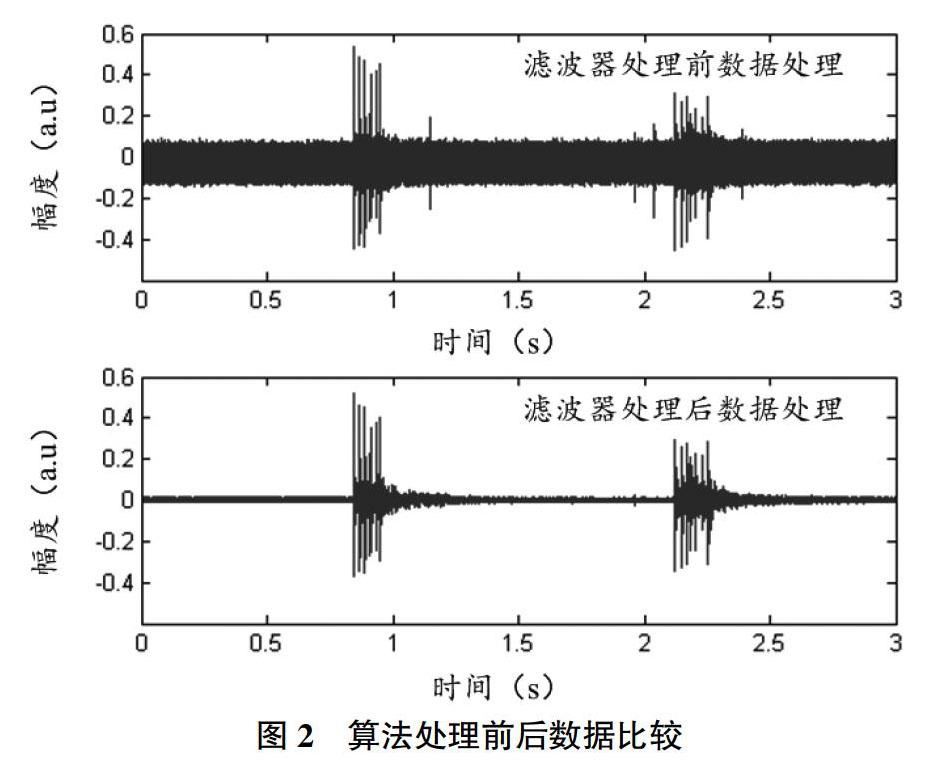
接下來將卡爾曼濾波器應用到光纖圍欄設備上,對干涉后的信號進行濾波處理,處理前后的數據對比如圖2所示。從圖中可看出,通過本文算法處理后的數據噪聲顯著降低,并且沒有對擾動信號形狀及幅度產生可察覺的影響。
最后,觀察本濾波器對擾動位置定位精度的比較,以此來判斷該濾波算法是否能提升光纖圍欄的定位精度。我們選擇了兩個不同的位置150米與835米,分別進行了大量攀爬、敲擊防護網的實驗,隨機十次的定位結果如表1和表2所示。
由表1和表2可以看出,在攀爬過程中,人體對防護網的作用力變化較大,導致定位結果偏差較大;而在敲擊過程中,在防護網上的作用力度較一致,使得定位結果偏差較小。另外,算法處理后的標準差更小,說明定位精度有提高。其次,由表可知未經去噪的定位數據均小于物理位置,這是由于噪聲導致的,而光纖圍欄設備上使用本算法去噪后得到的定位結果與物理位置非常接近。
3 結論
本文提出一種應用于光纖圍欄系統的實時降噪方法——自適應卡爾曼濾波濾波,文中用高斯-馬爾科夫模型對系統輸出信號進行建模,算法應用到光纖圍欄的實驗結果表明,卡爾曼濾波器的去噪算法可以很好地去除光纖圍欄系統的輸出噪聲,提高系統的定位精度,對光纖圍欄的實用性能有很好的提升。
參考文獻
[1]YANG Z L.Identification of perimeter alarm signal based on wavelet transform[J]. Opto-Electronic Engineering,2013,40(1):84-89.
[2]LUO G M,LI X,CUI P G,et al.The intrusion signal recognition of perimeter security of distributed fiber-optic senor[J].Opto-Electronic Engineering,2012,39(10):71-77.
[3]I.Hashlamon.A new adaptive extended kalman filter for a class of nonlinear systems[J].Journal of Applied and Computational Mechanics,2020,1-12.
[4]Y.Zhao,C.Yang.Information fusion robust guaranteed cost Kalman estimators with uncertain noise variances and missing measurements[J].International Journal of Systems Science,2019:2853-2869.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(2016年9期)2016-02-27 09:05:39
