華龍一號(hào)堆芯測(cè)量探測(cè)器組件縮容裝置控制系統(tǒng)硬件設(shè)計(jì)
2020-08-04 16:20:35張安銳羅英安彥波殷琪張弦
科技視界 2020年15期
關(guān)鍵詞:系統(tǒng)
張安銳 羅英 安彥波 殷琪 張弦
摘 要
本文對(duì)華龍一號(hào)輻照后探測(cè)器組件縮容裝置控制系統(tǒng)技術(shù)進(jìn)行了研究,針對(duì)縮容裝置控制提出了技術(shù)方案,利用星型與環(huán)型結(jié)合的拓?fù)鋬?yōu)化結(jié)構(gòu)的思想有效地解決了系統(tǒng)分散布置通信問題。本文主要介紹該縮容裝置控制系統(tǒng)硬件的方案設(shè)計(jì)、核心設(shè)計(jì)思想以及硬件選型及配置情況。試驗(yàn)結(jié)果表明,本控制系統(tǒng)硬件設(shè)計(jì)可靠、性能穩(wěn)定、控制精度高。
關(guān)鍵詞
華龍一號(hào);探測(cè)器組件;縮容裝置;控制
中圖分類號(hào): TL503 ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識(shí)碼: A
DOI:10.19694/j.cnki.issn2095-2457.2020.15.033
Abstract
This paper studies the control system technology of the shrinkage device of the detector snatch after the irradiation of Hualong No.1,and proposes a technical solution for the control of the shrinkage device.The idea of topology optimization structure combining star and ring is used to effectively solve the problem of distributed communication in the system. This article mainly introduces the scheme design,core design ideas, hardware selection and configuration of the control system hardware of the shrinkage device.The test results show that the hardware design of the control system is reliable,the performance is stable,and the control accuracy is high.
Key Words
Hualong No.1;Detector snatch;Shrinkage device;Control
0 引言
華龍一號(hào)堆型采用了新型堆芯測(cè)量系統(tǒng),探測(cè)器組件從堆頂引出,且需要在兩個(gè)換料周期進(jìn)行更換,為此研制了“華龍一號(hào)”堆芯測(cè)量探測(cè)器組件縮容裝置解決上述問題。
探測(cè)器組件縮容裝置是一項(xiàng)機(jī)電一體化設(shè)備,可在程序控制下自主完成待拆除探測(cè)器組件定位、剪切、卷繞等一系列動(dòng)作。
探測(cè)器組件縮容裝置的主要結(jié)構(gòu)包括:視覺對(duì)中裝置及監(jiān)控系統(tǒng)、大小車本體裝置、屏蔽門、剪切卷繞裝置、暫存容器裝置等。
探測(cè)器組件縮容裝置的工作原理如下:
1)利用視覺對(duì)中裝置及監(jiān)控系統(tǒng)對(duì)探測(cè)器組件進(jìn)行精確定位;
2)利用大小車本體裝置在平面上移動(dòng)并精確到位;
3)利用探測(cè)器組件抓具抓取探測(cè)器組件;
4)利用剪切卷繞裝置將探測(cè)器組件進(jìn)行剪切以及卷繞成型操作;
5)利用暫存容器裝置將探測(cè)器組件繞卷儲(chǔ)存。
研制的探測(cè)器組件縮容裝置控制系統(tǒng)解決了縮容裝置控制功能復(fù)雜,通信數(shù)據(jù)量大、系統(tǒng)本身實(shí)時(shí)性要求較高等問題。經(jīng)試驗(yàn)驗(yàn)證,該控制系統(tǒng)運(yùn)行高效、控制精度高、可靠性高。本文對(duì)縮容裝置控制系統(tǒng)的硬件組成、設(shè)計(jì)方案以及配置情況進(jìn)行簡(jiǎn)要介紹。
1 縮容裝置控制系統(tǒng)總體技術(shù)方案與設(shè)計(jì)思想
1.1 控制系統(tǒng)總體技術(shù)方案
縮容裝置控制系統(tǒng)采用分布集中控制,控制系統(tǒng)架構(gòu)如圖1所示。可以分為上位機(jī)層、控制器層以及執(zhí)行部件層三層:
1)縮容裝置控制系統(tǒng)上位機(jī)層:上位機(jī)監(jiān)控系統(tǒng)采用SIM ATIC機(jī)架式工控機(jī),主要完成:圖像采集及處理、縮容邏輯控制及人機(jī)交互等。該層控制的特點(diǎn)是處理的數(shù)據(jù)多,速度快,但實(shí)時(shí)性要求不高。
2)縮容裝置控制系統(tǒng)控制器層:特點(diǎn)是處理的數(shù)據(jù)相對(duì)較少,但對(duì)實(shí)時(shí)性、可靠性要求高。將運(yùn)動(dòng)控制層又分為兩個(gè)部分:大小車運(yùn)動(dòng)控制器及剪切卷繞運(yùn)動(dòng)控制器。控制器采用西門子1500系列PLC控制器。
3)縮容裝置控制系統(tǒng)執(zhí)行部件層:包括各類伺服電機(jī)驅(qū)動(dòng)器及電磁閥等。
工作時(shí),工控機(jī)與運(yùn)動(dòng)控制器通過工業(yè)以太網(wǎng)進(jìn)行通訊。上下位機(jī)電纜可快速插拔。電纜卷繞在可卷盤上,卷盤可自動(dòng)收線。縮容裝置控制系統(tǒng)總體技術(shù)方案見圖1。
控制系統(tǒng)主要由工控機(jī)、運(yùn)動(dòng)控制器、操作顯示屏、監(jiān)控屏、屏蔽門模塊、暫存容器模塊、大車模塊、小車模塊、剪切模塊、卷繞模塊、壓緊模塊、箱體導(dǎo)軌模塊、隨動(dòng)保持模塊、各模塊驅(qū)動(dòng)的電機(jī)或氣缸、監(jiān)控相機(jī)及人機(jī)操作平臺(tái)等組成。
操作顯示器用于完成人機(jī)交互功能;監(jiān)控顯示器將監(jiān)控相機(jī)的圖像實(shí)時(shí)顯示在屏幕上;屏蔽門模塊主要通過氣缸作用完成屏蔽門的開合并實(shí)現(xiàn)輻照屏蔽功能;大小車模塊主要實(shí)現(xiàn)平面的平移定位,通過滑軌以及伺服電機(jī)實(shí)現(xiàn);暫存容器模塊實(shí)現(xiàn)探測(cè)器組件繞卷的暫時(shí)存儲(chǔ);剪切模塊實(shí)現(xiàn)探測(cè)器組件的剪切操作;卷繞模塊實(shí)現(xiàn)探測(cè)器組件的卷繞操作;壓輥模塊實(shí)現(xiàn)卷繞過程中對(duì)探測(cè)器組件徑向壓緊限位;箱體導(dǎo)軌模塊實(shí)現(xiàn)箱體整體移動(dòng)功能;隨動(dòng)保持模塊實(shí)現(xiàn)卷繞過程中探測(cè)器組件與卷繞軸保持垂直角度。
1.2 控制系統(tǒng)硬件設(shè)計(jì)思想——基于總線的分布控制系統(tǒng)
1.2.1 控制結(jié)構(gòu)模塊化
整個(gè)系統(tǒng)采用模塊化設(shè)計(jì)理念,系統(tǒng)功能分解,減少維護(hù)時(shí)間。由于該縮容裝置系統(tǒng)經(jīng)需求分析后發(fā)現(xiàn),需要借助多個(gè)系統(tǒng)協(xié)同完成功能實(shí)現(xiàn)。所以,為了能提高系統(tǒng)穩(wěn)定性以及可靠性,在控制系統(tǒng)硬件設(shè)計(jì)層面采用模塊化思想,將主要的功能抽象獨(dú)立成單獨(dú)模塊,從而降低模塊之間的耦合與干擾。
比如,起到定位作用的大小車本體控制系統(tǒng)、負(fù)責(zé)剪切卷繞的剪切卷繞裝置控制系統(tǒng)都分別獨(dú)立使用一個(gè)PLC進(jìn)行下位機(jī)的控制,從而提高整個(gè)系統(tǒng)控制的可靠性以及效率。
1.2.2 通信結(jié)構(gòu)拓?fù)鋬?yōu)化
由于本系統(tǒng)控制模塊眾多、具有實(shí)時(shí)控制性要求并且具備高精度的視覺對(duì)中裝置及監(jiān)控系統(tǒng),對(duì)于數(shù)據(jù)交互提出了更高的要求。為了滿足數(shù)據(jù)交互實(shí)時(shí)性的需要,對(duì)于傳統(tǒng)的通信結(jié)構(gòu)進(jìn)行拓?fù)鋬?yōu)化,采用了環(huán)形+星型的通信結(jié)構(gòu)解決方案:相距較近的子系統(tǒng)利用交換機(jī)作為信息交互的媒介,實(shí)現(xiàn)數(shù)據(jù)快速交互;對(duì)于相距較遠(yuǎn)的子系統(tǒng)之間利用千兆電氣端口實(shí)現(xiàn)交換機(jī)之間的信息交互。從而實(shí)現(xiàn)了系統(tǒng)的實(shí)時(shí)信息的需求。在操作區(qū)和設(shè)備本體上設(shè)置兩臺(tái)交換機(jī),分別實(shí)現(xiàn)對(duì)于現(xiàn)場(chǎng)設(shè)備的信息采集以及操作區(qū)設(shè)備的信息采集,并通過兩個(gè)交換機(jī)之間的千兆電氣端口實(shí)現(xiàn)交換機(jī)之間的通信。
2 縮容裝置控制系統(tǒng)硬件設(shè)計(jì)
縮容裝置控制系統(tǒng)主要由縮容裝置操作控制系統(tǒng)、大小車本體控制系統(tǒng)、剪切卷繞裝置控制系統(tǒng)、視覺對(duì)中裝置及監(jiān)控系統(tǒng)等組成,見圖2。
縮容裝置控制系統(tǒng)涉及3臺(tái)PLC系統(tǒng)、1個(gè)工控機(jī)、1個(gè)監(jiān)控主機(jī)及3個(gè)攝像機(jī),故設(shè)計(jì)了小型局域網(wǎng)解決各控制系統(tǒng)間的數(shù)據(jù)傳輸。局域網(wǎng)結(jié)構(gòu)根據(jù)各控制系統(tǒng)物理位置特點(diǎn)采用星型+環(huán)形的拓?fù)浣Y(jié)構(gòu),即:布置在相近位置的系統(tǒng)通過交換機(jī)連成星型網(wǎng)絡(luò),交換機(jī)為該星型網(wǎng)絡(luò)數(shù)據(jù)交換中心;布置在不同位置的星形網(wǎng)絡(luò)再連成環(huán)型網(wǎng)。
2.1 縮容裝置操作控制系統(tǒng)
縮容裝置操作控制裝置主要完成人機(jī)交互、圖像處理及總體運(yùn)動(dòng)協(xié)調(diào)等功能。控制系統(tǒng)由西門子SIMATIC機(jī)架式工控機(jī)IPC1、交換機(jī)、監(jiān)控主機(jī)IPC2、監(jiān)控顯示器、PLC分布式遠(yuǎn)程輸入/輸出模塊、操作面板及其他低壓元器件等組成,其主要元器件安裝在操作控制柜中。使用時(shí),操作控制柜布置在構(gòu)件水池旁+16.5m平臺(tái)上。
縮容裝置操作控制內(nèi)網(wǎng)絡(luò)結(jié)構(gòu)見圖3。
工控機(jī)IPC1采用西門子機(jī)架式工控機(jī), PLC分布式ET 200系列遠(yuǎn)程輸入/輸出模塊通過通信接口模塊連至交換機(jī)上。
交換機(jī)采用西門子SCALANCE X300系列交換機(jī),該交換機(jī)含一個(gè)千兆級(jí)電氣端口,七個(gè)高速以太網(wǎng)端口和兩個(gè)千兆級(jí)多模玻璃纖維光學(xué)端口,在星型網(wǎng)內(nèi)部,各主機(jī)及PLC通過高速以太網(wǎng)端口連至交換機(jī);環(huán)型網(wǎng)各交換機(jī)通過千兆級(jí)多模玻璃纖維光學(xué)端口連接。
2.2 縮容裝置大小車本體控制系統(tǒng)
大小車本體控制系統(tǒng)以西門子S7 CPU 1500系列控制器為核心,通過觸摸屏和I/O模塊輸入指令,由控制器進(jìn)行邏輯處理后控制三臺(tái)伺服驅(qū)動(dòng)器,其中一臺(tái)伺服驅(qū)動(dòng)器控制小車的伺服電機(jī),實(shí)現(xiàn)X方向的運(yùn)動(dòng);另外兩臺(tái)控制大車的兩個(gè)伺服電機(jī)同步運(yùn)動(dòng),實(shí)現(xiàn)Y方向運(yùn)動(dòng)。
大車軌道兩側(cè)裝有兩套編碼器,用于測(cè)量大車的實(shí)際位置;小車軌道一側(cè)裝有一套編碼器,用于測(cè)量小車的實(shí)際運(yùn)動(dòng)位置。使用時(shí),編碼器位置信號(hào)接入控制器用于判斷傳動(dòng)系統(tǒng)是否正常、大小車是否運(yùn)動(dòng)到位及大車兩端位置是否同步。
大小車本體控制系統(tǒng)主要由控制柜、電纜及現(xiàn)場(chǎng)伺服電機(jī)、編碼器、傳感器等組成。控制柜內(nèi)包含操作面板、觸摸屏、S7-1500系列控制器、ET200系列分布式遠(yuǎn)程輸入/輸出模塊、編碼器信號(hào)處理單元、伺服驅(qū)動(dòng)器、電源模塊、按鈕、旋鈕、手動(dòng)操縱桿、電纜、電源開關(guān)等。
系統(tǒng)采用西門子S7 CPU 1500系列控制器。PLC分布式ET200系列遠(yuǎn)程輸入/輸出模塊通過通信接口模塊連至交換機(jī)上。
大車兩個(gè)伺服電機(jī)、小車一個(gè)伺服電機(jī)與變頻器連接后通過變頻器的PROFINET接口連接至交換機(jī)從而與同樣以PROFINET方式連接至交換機(jī)的PLC實(shí)現(xiàn)通信。
2.3 縮容裝置剪切卷繞控制系統(tǒng)
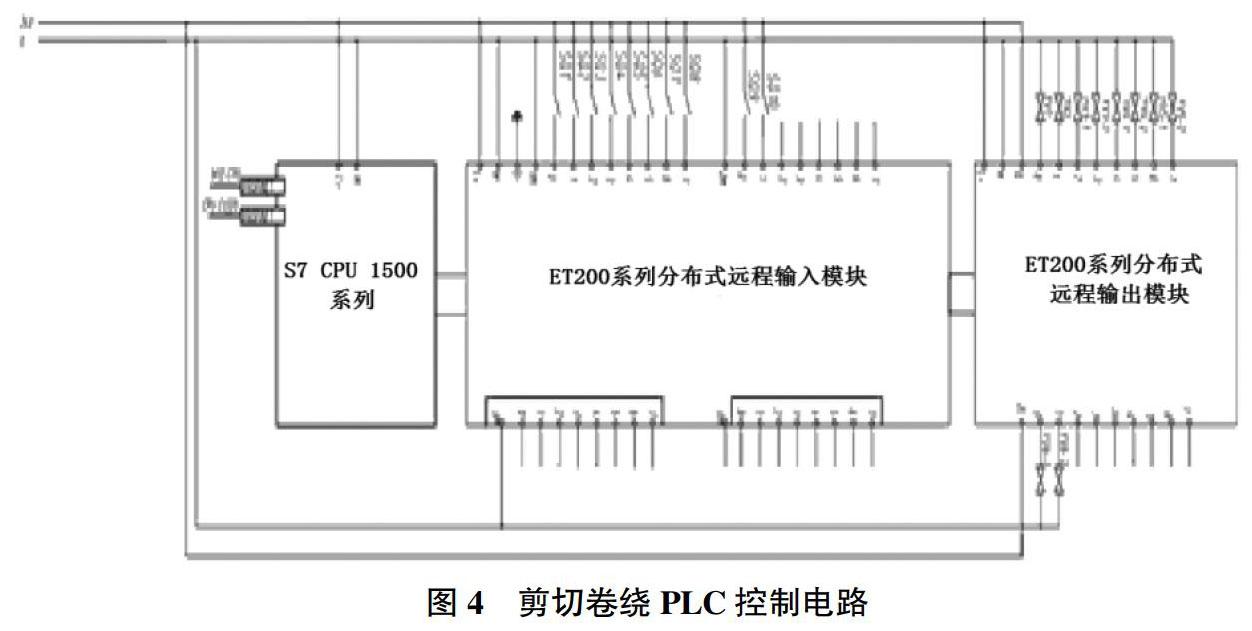
PLC在系統(tǒng)中負(fù)責(zé)采集、分析各個(gè)輸入信號(hào),并輸出控制信號(hào)驅(qū)動(dòng)主電路進(jìn)而控制各負(fù)載執(zhí)行相應(yīng)動(dòng)作達(dá)到控制目標(biāo)。PLC的選型主要根據(jù)系統(tǒng)輸入/輸出點(diǎn)數(shù)的多少來選擇[2]。考慮到本系統(tǒng)的輸入信號(hào)及輸出信號(hào)數(shù)量,本系統(tǒng)中選擇德國(guó)西門子公司S7 1500系列作為控制器。該P(yáng)LC可采用交流100~240V電源供電,穩(wěn)定性很好,輸出形式為繼電器輸出,能滿足本控制系統(tǒng)的設(shè)計(jì)要求。
剪切卷繞控制系統(tǒng)主要由西門子S7 CPU 1500系列控制器、ET200系列分布式遠(yuǎn)程輸入/輸出模塊、伺服驅(qū)動(dòng)器、氣動(dòng)控制回路、開關(guān)電源、各類傳感器及其他低壓元器件等組成。其控制電路見圖4。
伺服驅(qū)動(dòng)器采用西門子S120系列驅(qū)動(dòng)系統(tǒng)。SINAMICS120驅(qū)動(dòng)系統(tǒng)由一個(gè)控制單元、一個(gè)調(diào)節(jié)型電源模塊、一個(gè)1.6kW的單軸電機(jī)模塊、一個(gè)4.8kW的單軸電機(jī)模塊及兩個(gè)2.7kW的雙軸電機(jī)模塊組成。各電機(jī)模塊通過串行總線與控制單元連成環(huán)形網(wǎng)絡(luò),并最終通過控制單元的PROFINET接口與PLC通訊。
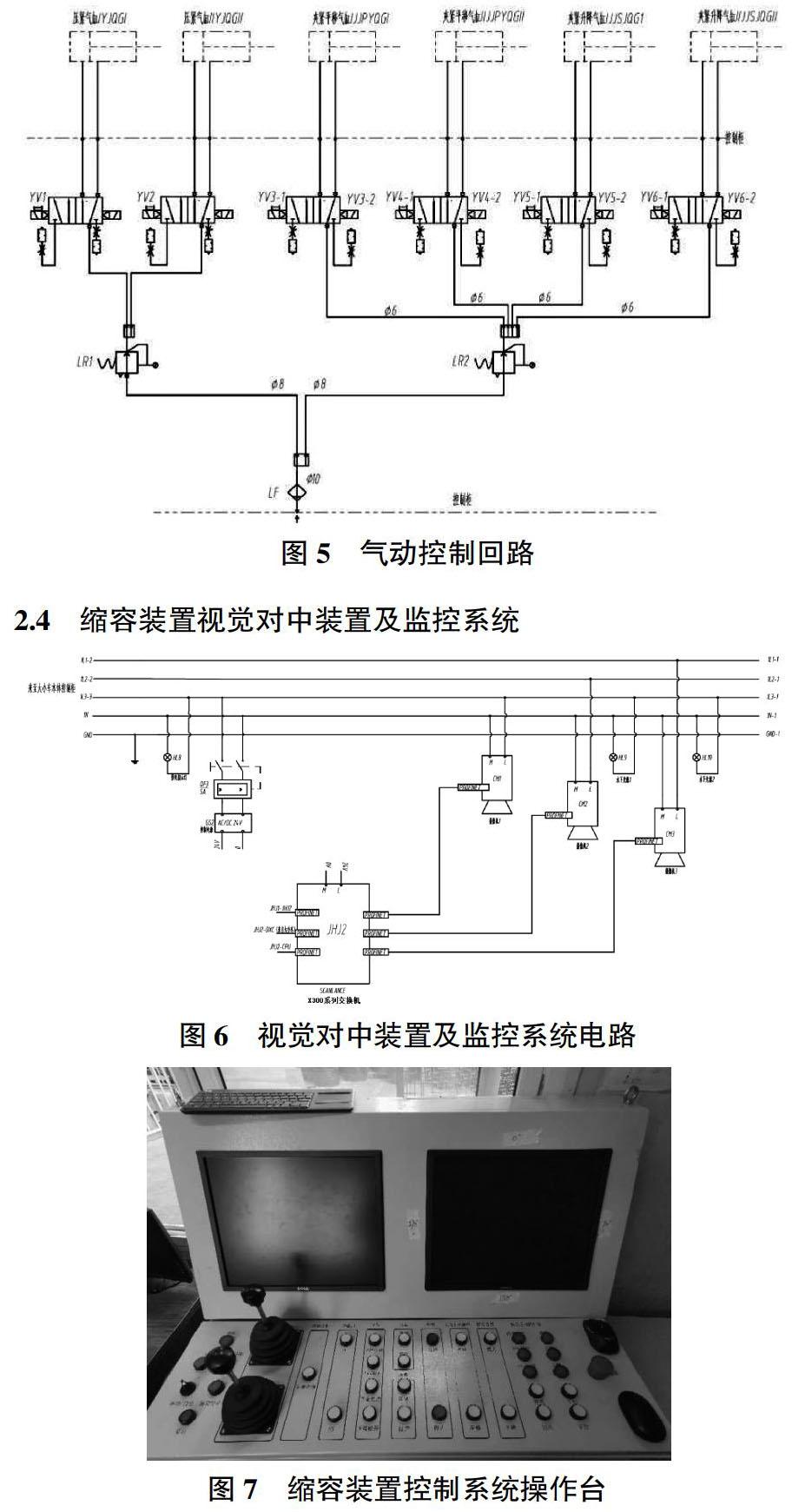
氣動(dòng)控制回路由一個(gè)過濾器、兩個(gè)減壓閥、兩個(gè)二位五通單電控電磁閥及四個(gè)二位五通雙電控電磁閥組成,見圖5。
2.4 縮容裝置視覺對(duì)中裝置及監(jiān)控系統(tǒng)
視覺對(duì)中裝置及監(jiān)控系統(tǒng)包含三個(gè)水下耐輻照攝像機(jī)及兩盞大燈等,三個(gè)攝像機(jī)通過以太網(wǎng)將圖像數(shù)據(jù)傳輸給交換機(jī),交換機(jī)再通過千兆以太網(wǎng)口傳輸給操作控制柜中的交換機(jī),其連接電路見圖6。
3 結(jié)論與展望
本文從縮容裝置研制的實(shí)際需求背景出發(fā),依次介紹了縮容裝置控制系統(tǒng)總體技術(shù)方案以及主要設(shè)計(jì)思想,并對(duì)縮容裝置操作控制裝置、大小車本體控制系統(tǒng)、剪切卷繞裝置控制系統(tǒng)、視覺對(duì)中裝置及監(jiān)控系統(tǒng)等子系統(tǒng)都進(jìn)行了詳細(xì)的介紹和闡述。該裝置的研制成功填補(bǔ)了三代核電站探測(cè)器組件拆除領(lǐng)域的技術(shù)空白,對(duì)提高核電經(jīng)濟(jì)性和安全性具有重要意義。
參考文獻(xiàn)
[1]張爭(zhēng)剛,熊剛.基于PLC的工業(yè)洗衣機(jī)控制系統(tǒng)設(shè)計(jì)[J].電子設(shè)計(jì)工程,2016,24(24):78-81.
[2]劉麗貞.基于PLC的兩側(cè)缸位置同步控制系統(tǒng)設(shè)計(jì)[J].滄州師范學(xué)院學(xué)報(bào),20 18,34(01):38-40.
[3]李雅靜,孟慧,張小青.基于PLC控制系統(tǒng)的溫室灌溉系統(tǒng)設(shè)計(jì)[J].機(jī)械工程與自動(dòng)化,2018(06):165-166.
[4]周永欣,馬文斌.六自由工業(yè)機(jī)器人控制系統(tǒng)硬件設(shè)計(jì)[J].電子世界,2017(02):154-155.
[5]閆宇田.通過PLC控制交通燈系統(tǒng)硬件設(shè)計(jì)[J].山西電子技術(shù),2019(03):13-14.
[6]姚偉浩.重介質(zhì)選煤PLC控制系統(tǒng)硬件設(shè)計(jì)[J].自動(dòng)化應(yīng)用,2019(03):25-26.
[7]汪潔.基于PLC的雙溫冷庫(kù)自動(dòng)控制系統(tǒng)硬件設(shè)計(jì)[J].南方農(nóng)機(jī),2019,50(24):136-137.
[8]楊淳清.基于嵌入式的Zigbee無線傳感智能家居系統(tǒng)硬件設(shè)計(jì)[J].電子技術(shù)與軟件工程,2019(03):164.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
