航空器跟隨滑行動態沖突風險計算模型
2020-08-06 00:22:18康瑞,楊凱
科學技術與工程 2020年18期
關鍵詞:模型
康 瑞, 楊 凱
(1.中國民用航空飛行學院空中交通管理學院,廣漢 618307;2.四川大學視覺合成圖形圖像技術國防重點學科實驗室,成都 610064;3.四川大學計算機學院,成都 610064)
滑行是指航空器以自身動力在滑行道系統中的運動過程[1]。滑行階段是機場場面運行主要組成部分。隨著中國民航飛行量逐漸增加,部分樞紐機場的平均滑行時間超過25 min,航空器滑行安全與效率決定了機場場面運行水平,因此判斷及量化滑行沖突成為民航業關注的重點課題。
中外相關學者對此展開了深入研究[2-9]。2010年,朱新平等[2]以增強型地面控制與引導系統(advanced surface guidance and control systems,A-SMGCS)為核心,對航空器資源占用沖突提出了解決方法;2013年,牟奇鋒等[3]計算擴展航空器輪廓最小間隔,提出了滑行碰撞概率評估方法;2015年,馮興杰等[4]以避讓沖突交叉口為目標,構造了多蟻群協同進化的滑行道優化分配算法;2016年,潘衛軍等[5]考慮機身與翼展范圍,針對十字交叉口的相遇滑行過程,設計了碰撞風險評估算法;2017年,夏正洪等[6]提取航空器的滑行軌跡,利用實時位置計算間隔并判斷沖突;2018年,張天慈等[7]建立混合整數規劃模型進行仿真了阻塞、沖突等擾動下的場面運行恢復過程;董兵[8]將滑行沖突點定位于滑行道交叉口建立了沖突避讓模型;2019年,張兆寧等[9]提出的遠端繞行滑行路徑優化模型中,以航空器占用共用節點時間差小于滑行安全間隔定義滑行沖突。目前相關研究主要存在的問題有:①對交叉滑行沖突研究較多,對跟隨滑行沖突研究很少;②傳統方法均以推測兩架航空器到達最接近共用資源的時機、位置判斷沖突,由于跟隨滑行時兩航空器已位于共用資源(同一條滑行道)中,因此無法將現有方法直接應用于跟隨滑行中。而在實際管制過程中,在低能見度條件下,管制員、后機機長無法目視判斷間隔,容易形成追趕,造成危險接近,甚至產生碰撞。這種情況下,塔臺管制員應根據場面監視數據[10]判斷沖突趨勢,及時發布指令調整間隔。實際上為降低對惡劣天氣影響,越來越多的大中型機場實施低能見度下運行程序[11],由此引入場面監視數據,針對航空器跟隨滑行過程,定義跟隨沖突標準,量化沖突概率,構造實時動態沖突計算模型,為飛行員提供跟隨沖突告警預警,對保障機場運行安全有重要意義。
為此,在滿足相關管制規定的基礎上,抽象跟隨滑行過程,考慮噴流范圍、機身長度等關鍵要素,建立航空器跟隨滑行動態沖突計算模型。采用 Visual C++平臺實現模型并進行仿真計算,分析關鍵參數對動態沖突的影響,并利用實時真實軌跡對本文模型進行驗證。
1 問題提出
設fi、fj為同向滑行的兩架航空器,如圖1所示,兩機依次在滑行道Tn上由右至左滑行,fi距離滑行道末端更近為前機,fj位于fi后方為后機。li、lj為機身長度。兩航空器所處的深灰色區域為共用滑行道。fi后方長度為ΔSi,j的淺灰色區域為兩機之間最小縱向間隔,該間隔由管制規則、前后機尾流等級差異綜合決定。
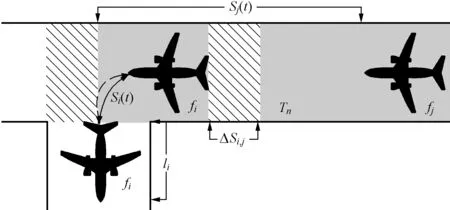
圖1 航空器跟隨滑行沖突Fig.1 Conflict of aircraft successively taxiing
假設fi到達Tn末端后左轉進入下游滑行道,此后離開共用滑行道并與后機fj成分散態勢。設fi、fj在t時刻滑行速度分布為vi(t)、vj(t),fi、fj與滑行道Tn末端距離為Si(t)、Sj(t),fi、fj縱向間隔為
ΔGi,j(t)≈Sj(t)-Si(t)-li
(1)
設fi、fj縱向間隔為ΔSi,j,若跟隨滑行中的某時刻t,兩機之間距離小于安全間隔ΔSi,j,則兩機沖突:
ΔGi,j(t)<ΔSi,j
(2)
將滿足式(2)的情況定義為事件C(t),根據速度、位置定義并求解P[C(t)]即可計算動態沖突概率。
2 航空器跟隨滑行沖突計算模型
2.1 模型建立
定義TOi,n(t)為以t時刻fi速度位置,推算得到的fi離開Tn,全機身進入下游滑行道的滑行時間:
(3)
小于安全間隔是指水平距離小于ΔSi,j的情況,設沖突時的最大間隔為ΔSi,j-1。令TCj,n(t)為以t時刻fj速度位置,推算得到fj到達距離Tn末端小于安全間隔,即形成沖突的所需滑行時間:
(4)
若在Tn內,fj追趕fi并形成沖突,應滿足:
?t, TOi,n(t)≥TCj,n(t)
(5)
因此可將t時刻沖突風險概率描述為
P[C(t)]=P[TOi,n(t)≥TCj,n(t)]
(6)
可將式(6)改寫為
(7)
將式(7)改寫為函數形式:
(8)
由此式(7)可表示為
P[C(t)]=P{f[vi(t),vj(t)]≥0}
(9)
定義vmax為最大滑行速度,vTmax為最大轉彎速度,Δv為每秒鐘速平均加速度,設航空器fi的預測滑行速度值域為
(10)
(11)
由此可得,兩航空器順向跟隨滑行沖突風險為
(12)
2.2 模型求解
設下一時刻fi速度在速度值域范圍內呈均勻分布,可得vi(t)的概率密度函數φ[vi(t)]為
(13)
同理可得fj速度vi(t)的概率密度函數:
(14)
圖2給出vi(t)、vi(t)取值及f[vi(t),vi(t)]的線性表示,滿足式(7)、式(8)條件的f[vi(t),vi(t)]值域范圍用陰影表示,設該陰影范圍面積為D(t)。
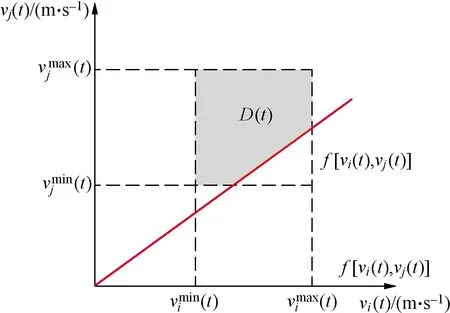
圖2 沖突時的速度范圍Fig.2 Speed range in conflict
由圖2可得:


(15)
將式(13)、式(14)代入式(15),可得每時刻動態跟隨沖突概率,同時為滿足0≤P[C(t)]≤1,令:
P[C(t)]=max(0,min{1,P[C(t)]})
(16)
3 程序設計及數據分析
3.1 沖突概率計算程序設計
設機場飛行區為4E級[12],長度為1 500 m的平行滑行道上,有兩架航空器同向跟隨滑行。根據機場管制規則[1],令vmax=13.8 m/s,vTmax=4 m/s,Δv=1.0 m/s[13-14],設fi、fj為常見的尾流中型運輸機,li=lj=45 m,ΔSi,j=50 m。利用VC++編程,建立機場跑道、滑行道結構,并動態仿真航空器跟隨滑行過程。圖3分別給出兩機由于速度、位置差異造成的不同跟隨滑行狀態。圖3(a)描述了前、后機以相同速度保持間隔滑行過程,圖3(b)描述了后機追趕前機,小于安全間隔造成沖突過程,圖3(c)描述了后機速度減慢,與前機間隔增大的情況。
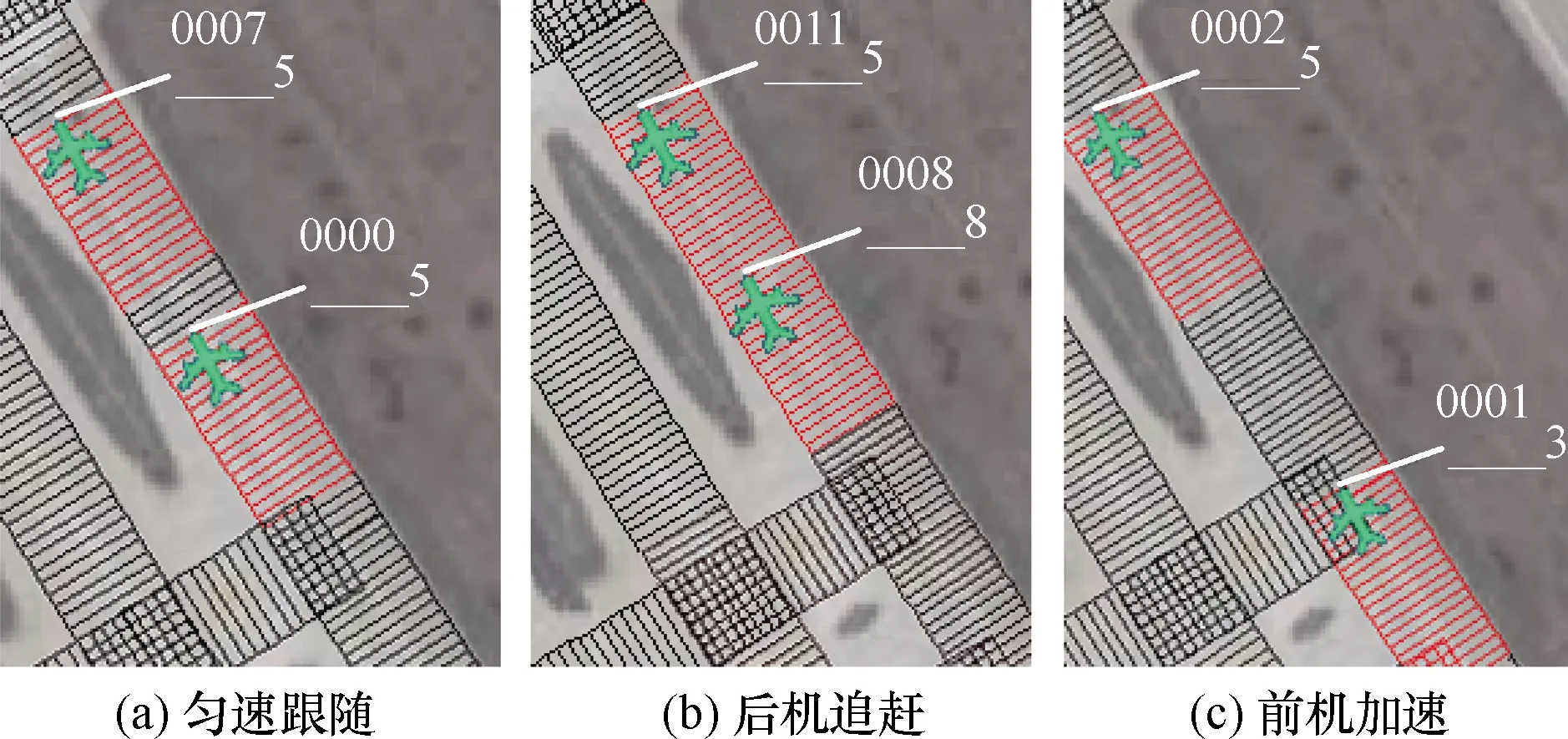
圖3 動態仿真運行示意圖Fig.3 Schematic diagram of dynamic simulation operation
3.2 仿真模擬及數據分析
在動態滑行仿真基礎上,以圖4中給出的程序結構及邏輯,對勻速、勻加速、勻減速運動下動態沖突進行計算。初始設置前機fi距離滑行道末端500 m,即Si(0)=500 m,定義ΔGi,j(0)為初始時刻兩航空器水平間隔。設ΔGi,j(0)為50~250 m,t為1~100 s,每次仿真令t增加1 s,令ΔGi,j(0)增加2 m。即可得到隨時間t、ΔGi,j(0)動態變化沖突風險。
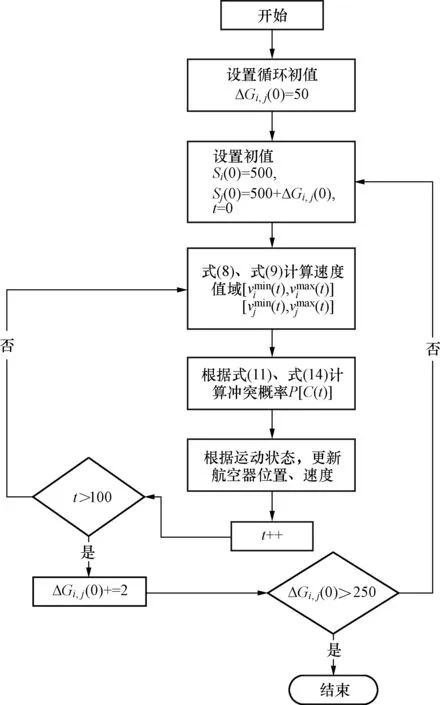
圖4 滑行沖突計算結構 Fig.4 Taxiing conflict calculation structure
3.2.1 勻速運動時的沖突風險計算
設fi、fj進行5 m/s的勻速、等距離運動,圖5給出沖突風險P[C(t)]變化情況。
圖5 勻速運動時沖突風險變化趨勢Fig.5 The tendency of conflict risk in uniform motion
如圖5所示,勻速運動時沖突風險P[C(t)]與ΔGi,j(0)取值成負相關,當ΔGi,j(0)>94沖突風險與t成負相關,50≤ΔGi,j(0)≤94,沖突風險與t成正相關。這是由于兩機勻速運動,ΔGi,j(0)越大,后機追趕前機可能性越低,沖突風險越小。當ΔGi,j(0)>94,隨著t增加,前機逐漸接近滑行道末端,雖然前機轉出時會減速至4 m/s,與后機產生速度差,但由于兩機距離較大,較小速度差無法造成追趕沖突,因此P[C(t)]隨t增加逐漸減少,最大值為0.5。而50≤ΔGi,j(0)≤94時,兩機距離較近,短時間的追趕即會形成沖突,因此P[C(t)]隨t增加而增大,當ΔGi,j(0)<78,前機轉彎時TOi,n(t)增加,而TCj,n(t)減少,滿足式(3)沖突條件,因此P[C(t)]最大值為1.0。
3.2.2 勻加速運動時沖突風險計算
設fi以5 m/s勻速運動,fj以0.1 m/s2[15]靜止開始做勻加速運動,圖6給出沖突風險變化情況。
如圖6所示,勻加速運動時,ΔGi,j(0)≥180,P[C(t)]恒為0。這是由于后機是從靜止逐漸加速的,由于前機為5 m/s勻速運動,t在1~50 s呈前快后慢趨勢,t在51~100 s呈前慢后快趨勢,若初始間隔較大,后機追趕前機所需時間TCj,n(t)較長,因此在前機離開滑行道時仍能滿足安全間隔,沖突風險很小。當ΔGi,j(0)<180,P[C(t)]與t正相關,與ΔGi,j(0)負相關,說明初始間隔越小,后機速度越大,追趕趨勢越明顯,越容易造成沖突。當ΔGi,j(0)<110,P[C(t)]最大值為1.0,且ΔGi,j(0)越小,P[C(t)]=1.0對應的時間范圍越長,ΔGi,j(0)=50時,P[C(t)]=1.0對應時間區間為83~100 s,表明按照當前速度,后機會在83 s追上前機并小于安全間隔,需在83 s前采取減速措施,避免沖突。
圖6 勻加速運動時沖突風險變化趨勢Fig.6 The tendency of conflict risk in uniformly accelerated motion
3.2.3 勻減速運動時沖突風險計算
設fi以5 m/s勻速滑行,fj初始10 m/s并以-0.1 m/s2勻減速至靜止,圖7為沖突風險變化。
圖7 勻減速運動時沖突概率變化趨勢Fig.7 The tendency of conflict risk in uniformly deceleration motion
如圖7所示,P[C(t)]與ΔGi,j(0)、t均負相關。這是由于后機是從10 m/s逐漸減速的,當t較小時,后機速度較大,追趕趨勢明顯,若保持該速度繼續滑行,則必然形成沖突,因此當t<25 s,ΔGi,j(0)≤60,P[C(t)]恒為1.0。隨著t逐漸增加,后機不斷減速,t>50 s形成前快后慢狀態,前機逐漸遠離后機且后機速度進一步減小,沖突風險為0。ΔGi,j(0)越大,P[C(t)]=0對應時間范圍越長,當ΔGi,j(0)=250,t在63~100 s內P[C(t)]=0。說明63 s后,后機與前機滿足安全間隔且不存在追趕,兩機已無沖突風險。
對比圖5~圖7可知,當后機與前機速度差越大、航空器之間間隔越小,越容易形成追趕,沖突風險值越大。當前機轉入其他滑行道時,需綜合考慮滑行道構型、轉彎速度等限制,對后機及時發布減速指令,防止產生沖突。控制后機速度和擴大間隔雖然能減少沖突風險,但會降低滑行效率,造成滑行道資源浪費。若僅為兩航空器配備最小安全間隔,則存在極大沖突風險,需連續不間斷監視后機速度,防止出現危險接近。
為證實本文模型的實驗結果與實際運行過程相符,深入分析相關數據。如圖5~圖7所示,當ΔGi,j(0)屬于區間[90,110],三種運動狀態下沖突風險均小于0.6且風險概率標準差小于0.1,以上數值與文獻[13]仿真驗證結論一致,且實際監視數據統計結果為:航空器在平行滑行道平均速度為4.82 m/s,航空器平均縱向間隔為94.3 m。表明實驗結果符合實際運行過程。當P[C(t)]為0.8時,后機減速至停止等待,最大減速度為0.25 m/s2,該值與文獻[14]中統計數據基本一致。
由此可知:當航空器平均滑行速度達到5 m/s時,管制員為前后跟隨的航空器配備90~110 m滑行間隔,滑行沖突風險較小且變化趨勢穩定,能保障安全且減少管制指令。利用本文模型計算跟隨滑行沖突,當沖突概率大于0.8時,對后機進行預警告警,能減少避讓沖突導致的滑行急減速,提高乘客乘機的舒適度。分析可知,本文模型可量化動態沖突風險,計算結果可靠、有效且實際運行過程相符,利用本文模型計算結果能為場面滑行提供沖突預警,提高機場運行安全水平。
3.3 實際運行數據驗證及分析
采集并處理中南某機場場面監視雷達監測到的航空器滑行監視數據。圖8為航空器跟隨滑行的兩種場景。根據實際機型及滑行道結構設置參數:ΔSi,j=50 m,飛機機身均為45 m,場景一前后機為CES5336、CSN3300,ΔGi,j(0)=78 m,Si(0)=423 m,場景二前后機為AFL221、CSN362,ΔGi,j(0)=82 m,Si(0)=498 m。利用本文模型、傳統基于間隔的沖突模型[7],分別計算沖突解脫前91 s的P[C(t)](沖突風險),并對比分析不同模型的計算結果。
淺灰色條狀區域為滑行道;黃色、綠色點跡分別為前機、后機每秒鐘滑行軌跡點;CES5336、CSN3300、CES5336、CSN3300分別為航空器呼號;R、S、E、H、W為平行滑行道及聯絡道名稱,位于滑行道右側圖8 跟隨滑行場景及沖突概率比較 Fig.8 Comparison of following taxi scene and conflict probability
如圖8所示,兩種情況下后機與前機在同一條滑行道跟隨滑行。情況一中,前機CES5336初始滑行速度為6 m/s快于后機,因此P[C(t)]隨t逐漸減少,當其接近交叉口,速度逐漸減少至3 m/s,而后機CSN3300加速至5 m/s,P[C(t)]在41 s突然增長至0.45,且隨t逐漸增加至0.55。由于CES5336滑行55 m即轉入聯絡道,因此81 s后兩機成分散趨勢,沖突風險不斷下降至0.31。情況二中AFL221與CSN362均接近跑道外等待點,根據機場管制規則,航空器在跑道外等待點必須得到指令才能繼續滑行進入跑道,因此兩機滑行速度較慢,均小于2.5 m/s,基本呈勻速等距離運動狀態。71 s時,AFL221轉入聯絡道進行減速,但由于CSN362速度較小,因此兩機呈輕微的追趕趨勢,且前機滑行50 m即離開共享滑行道,因此沖突風險較小,均值為0.267,曲線波動較小,標準差為0.008 7。
將本文模型與傳統基于間隔沖突模型[7]進行對比,兩種模型計算結果有明顯差異。兩種情況下,傳統模型沖突風險均隨時間增加而增大,而本文模型卻呈現不同結果。情況一中,本文模型計算風險值先減少后增加最后再急劇減少趨勢;而情況二中,本文模型風險值隨時間變化很小,基本呈固定值。這是由于傳統模型僅考慮單位時間的水平間隔變化,因此在后機速度增加初期,由于間隔未明顯縮小,傳統模型的風險值仍呈緩慢增加趨勢,而本文模型可根據速度變化實時更新沖突概率,能及時反映出沖突趨勢的突變,由此在后機提速的關鍵時刻,本文模型風險突然增加1.2倍。當前機離開共享滑行道時,但由于兩機位置接近,傳統模型判斷沖突仍呈增長趨勢,但實際上兩機已形成分散滑行,沖突解脫[16],因此本文模型風險大幅度下降為0.3。同理情況二中,兩機速度較慢,保持穩定水平間隔,因此沖突風險較小,但由于后機經過前機等待道口,距離減少導致傳統模型判斷沖突持續升高為0.39,是本文模型的1.3倍。
由此可知,本文模型對航空器速度變化更敏感,能如實反映速度變化對沖突趨勢的影響;本文模型基于航空器滑行態勢定量計算沖突概率,能有效避免由于等待位置接近而造成的虛警誤警;本文模型基于運動位置和方向判斷滑行風險,能整體預測沖突產生、加劇及消散趨勢。綜上所述,本文模型計算結果優于傳統模型,更適用于實際航空器過程中的沖突判斷與安全管理。
4 結論
提高機場場面運行效率和安全水平,合理判別滑行沖突風險,是我國民航研究熱點問題。深入分析了航空器同向滑行時的沖突過程,綜合滑行實時滑行速度、位置、管制規則和機身長度,建立了航空器跟隨滑行動態沖突風險模型。為了進一步分析滑行速度、初始間隔等重要參數對沖突趨勢的影響,進行了多次計算機數值模擬仿真,并就各相關參數的作用及影響范圍進行了分析對比。仿真結果與實際數據驗證均能表明,本文模型計算結果可靠有效,與實際運行過程相符,該模型能實時量化速度、位置、滑行趨勢對沖突的影響,計算結果優于傳統模型,因此能對航空器滑行安全評估、沖突預警告警提供技術支持。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
