多波束與側掃聲吶在水下探測中的應用
2020-08-10 08:45:03鄭暉
中國新技術新產品 2020年10期
鄭暉


摘? 要:多波束探測與側掃聲吶掃測作為水下障礙物探測的2種常用技術手段各有優勢。就多波束探測技術而言,其優勢在于通過獲得精確的水深數據,實現水下障礙物的精準定位。側掃聲吶在大范圍快速獲取地貌性質、形狀判斷中優勢更顯著。基于此,該文以某水庫救援項目為研究案例,對水下障礙物側掃聲吶掃測和多波束探測的具體應用過程進行分析。結合這2種技術對水下地形環境、水下地貌進行描繪,可以實現高效互補,從而獲得精確的水下地形數據和水底地貌影像。
關鍵詞:多波束探測;側掃聲吶掃測;水下障礙物
中圖分類號:P229? ? ? ? ? ? 文獻標志碼:A
0 引言
水下障礙物探測是水資源開發利用的基礎和前提,其能在現代化探測技術的應用下,實現水下地形及障礙物的測量,這不僅確保了水域船舶通行的安全性,而且為水下救援工作的開展提供了有效指導。在當前的水下探測中,多波束與側掃聲吶是2種較為有效且常用的探測方式。從本質上講,這2種障礙物探測方式均為條帶式掃海系統,其能實現水底地形的全覆蓋無遺漏掃測。但是在實際掃測中,多波束與側掃聲吶的工作原理和工作方式仍有一定差異,該文以某水庫救援-測試項目為例,對多波束與側掃聲吶的實際應用要點及效果進行分析[1]。
1 系統的組成及原理
1.1 多波束測深系統組成及原理
1.1.1 多波束測深系統組成
多波束探測系統在水下測深中得到廣泛應用。從設備結構單元來看,其包含測深設備、定位設備、羅經運動傳感器、聲速剖面儀和輔助設備5 個單元[2]。
其中探測設備多波束換能器決定了整個系統的數據分辨率。差分GNSS接收機是全系統的定位裝置,其在障礙物定位測量中發揮著控制測量的作用。在多波束測深作業中,羅經運動傳感器能實現測量船實時姿態及航向數據的有效采集。聲速剖面儀用來測量海區的聲速剖面數據,用于校正聲速曲線。潮位信息將實測水深值換算成與國家高程系統同一的高程數據。此外,輔助設備包含了導航和數據處理軟件。通常水深探測的數據采集、顯示和處理均是通過工作站操作完成的。
1.1.2 多波束測深系統工作原理
利用聲吶換能器向水底發射寬扇區聲脈沖并接收回波信號,是多波束測深系統應用的基本原理(如圖1所示)。就發射寬扇區聲脈沖而言,其聲波的頻率多處于100 kHz以上,當發出的聲波經水底障礙物反射形成返回波束時,換能器能對這些返回波束進行有效地接收和處理。此時,通過同步獲取的潮位和聲迷剖面數據,即可實現探測水域底部狀況的有效檢測。具體來說,結合獲取的波束旅行時間和波束角,控制軟件能實現波束腳印的水深和位置的有效計算,根據計算結果,即可獲得具有較高精度都的水深條帶數據,在計算機系統級及相關建模軟件的支撐下,可以建立水下地形數字高程模型。
從測量結果來看,多波束測深系統所獲取的是隨身數據,經過編輯和處理形成關于水底地形的高程模型文件。在測量數據未經處理前,原始數據信息總量較多,且內容形式較為繁雜。其中,條帶水深數據是較為主要的測量數據內容,而聲速剖面數據、運動傳感器數據、羅經數據和潮位數據是輔助數據的重要組成部分。
1.2 側掃聲吶系統組成及原理
側掃聲吶系統在地貌性質、形狀判斷中具有突出優勢,其主要組成單元包括工作站、換能器基陣、拖纜和差分GNSS接收機等。
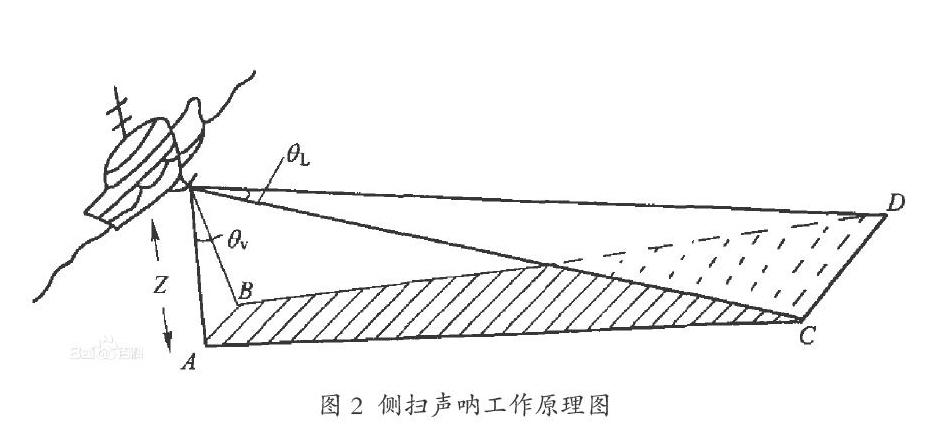
采用側掃聲吶系統進行水下障礙物測量時,系統換能器能向兩側水底發射出超過100 kHz的聲波,該聲波無穿透能力,因此回波信號較強,且完全來源于水底面的反射。采用換能器接受并處理返回波束,按照強度、時間對返回波束進行處理,可獲得具體的像素值。就返回波束強度而言,其不僅包含了水底起伏信息,而且還涉及水底底質信息。通常,回波束信號較強的區域,其水底較為堅硬、粗糙。而回波束信號較弱的地區,水底較為柔軟、平坦或呈下凹趨勢。回波信號經由工作站進行處理,最終形成側掃聲吶圖像(如圖2所示)。
需注意的是,側掃聲吶采用的是斜距成像原理,其數據的采集過程較為特殊,這使得在形成側掃聲吶圖像的過程中,圖像是按照發射Ping排列的掃描序列圖像轉換而來,因此存在一定的缺陷。如速度失真、斜距變形、目標距離變形、水底坡度變形等,此外,側掃聲吶圖像還容易出現雙曲變形、隨機變形和拖魚高度變化引起的變形等缺陷。可見側掃聲吶系統不具備整體的地理方位和可量測性,其在反應水底對象的空間分布狀況的能力上還有待提高[3]。
2 應用案例
2.1 工程概況
某水庫救援-測試項目,作為大山里修建水壩攔截自然河流形成的水庫,該水庫作業區域剖面呈漏斗形。在實際測量調查中,采用多波束測量事發區域水庫的三維水下地形,并為側掃聲吶作業航線提供參考,為疑似目標比對提供參考。通過側掃聲吶作業辨識水下的地貌情況,搜尋可疑目標物。通過2種數據的結合進行目標精細辨識,期望能為今后水庫救援工作提供有效參考。
2.2 水下目標多波束掃測
在水庫救援水下目標多波束掃測作業中,將多波束換能器安置在船舶右舷,同時在駕駛甲板右側欄桿上固定GNSS天線,此外將IMU安裝在中央通道拐角。在具體作業時,先進行各子系統船體坐標的準確定位。其中,X、Y、Z三軸分別代表船艏向、右舷方向和垂直向水底方向,參考點選在IMU處,其坐標為(0,0,0)。該項目采用浙海巡0728作為工作船舶。
如圖3所示,水下目標多波束掃測通過多波束安裝調試、導航定位安和多波束作業的方式開展外業探測作業。要求多波束安裝調試、導航定位安裝符合水下目標多波束掃測基本原理,同時符合現有設備工作的系統指標和物理控制指標。作業時遵循水下目標多波束掃測原理,開展水下障礙物探測[4]。
完成水下目標多波束掃測后,需要規范化的進行數據內業處理。內業工作具體流程如圖4所示。
在使用多波束測量數據前,需要按照格式轉換、參數校正、數據編輯和數據輸出的形式進行數據處理。整個數據處理中有3個要點。 1)進行水庫聲速剖面數據的處理,該項目調查水庫中心位置,并拉取聲速剖面,根據檢測結果可知,該區域的聲速變化較大,10 m~27 m處存在溫躍層。2)開展多波束數據校準工作。前期作業中,為從源頭上確保多波束數據的準確性,要求對多波束換能器的安裝姿態進行校正,通過GPS時間同步脈沖(1PPS)保證多波束系統各設備間的時間同步,要求同步誤差在1 ms以內。在測量數據校準中,于特定的水底地形上展開校準工作。橫搖參數校準時水底地形坡度應﹤2°,校準數據選擇垂直于航線方向的橫截面數據。縱搖參數、艏向參數校準中,水底地形坡度需﹥5°,前者采用同一條測線往返測量,后者通過2條平行測線進行同向測量。實際測量中,要求往返測量中的航速保持一致。需要注意的是,在艏向參數校準中,要求2個波束條帶的重疊率保持在20%~50%,避免數據出現疏漏。3)在數據后處理中,添加聲速剖面、潮位等數據。將所測的數據轉化為水深基準面數值,最終通過數據編輯手段的應用,有效地進行聲波濾波計算、數據清洗,獲取更加清晰的水下地形情況。并將所測數據繪制成圖件形,再與當地的居民溝通,確保水下地形圖識圖工作的有序開展。
2.3 側掃聲吶測量
側掃聲吶測量作業主要分為側掃聲吶安裝調試、側掃聲吶測量作業2個環節。該項目側掃聲吶測量作業中,采用SS3060型側掃聲吶系統,該設備可同時發射300 kHz和600 kHz 2個頻率的聲波,采用CW信號和Chirp信號對聲波信號進行調制,有效地提升了作業幅寬和成像清晰度。在側掃聲吶安裝調試過程中,重點對其設備的技術參數進行調試,為水下障礙物的精準測量創造良好條件。
側掃聲吶測量作業過程中,采用船尾拖曳式布放方式(如圖5所示)。
具體操作要點有3個。1) 在GNSS定位系統天線布放時,將其設置在拖點附近,并使得天線四周無遮擋,可以保證定位誤差較小,同時確保了拖纜姿態觀察時視野的開闊性。2)基于側掃聲吶工作的基本原理,進行水下相關數據測量,初步獲得水下障礙物的原始數據。3)對側掃聲吶數據進行處理,整個數據處理按照底跟蹤修正、增益修正、水柱修正和圖像鑲嵌4個步驟處理。就底跟蹤修正而言,其能在勾勒底跟蹤線的基礎上,正確識別水底邊緣,實現水底與水體的區分。而增益修正是對圖像各部圖像進行濾波調諧,這樣能確保聲吶圖像回波強度的均勻性,同時,顯著提升了水底地物、地貌的辨識程度。
該項目按照固定增益、時變增益、吸收損失和擴散損失等方式進行參數調整,獲得了良好的圖形結果。最后,經過水柱修正、圖像鑲嵌有效地提升了側掃圖像的可讀性。需注意的是,在水柱修正、水體圖像去除階段,主要是依據底跟蹤修正方式對水體圖像與水底圖像邊緣進行區分的。
2.4 測試過程影響分析
在具體測試過程中,由于作業船只為當地地方海事巡邏艇,吃水30 cm,在進行多波束調查時發現當地水深最大超過70 m,水庫岸邊落差極大,岸邊緩坡水深1 m,前行不到4 m水深達到20 m,再前行10 m水深就能達到60 m。水下還有未進行砍伐的樹林等地物,未砍伐的樹林會對側掃聲吶作業造成影響。這是因為為獲取穩定、連續和良好的側掃聲吶影像,作業船采取低速直線航行以此來確保側掃聲吶距底距離為最佳作業距離,且側掃聲吶拖魚是拖曳式作業,拖魚通過電纜拖在作業船尾部,在作業船進行航行機動時,拖魚反應會較作業船有延時,因此會勾掛樹木造成設備損毀。
3 結語
結合該項目測試及調查形成過程可知,多波束與側掃聲吶均能實現水下障礙物的有效探測,2種測量聯合的方式可以實現水下地形及障礙物的精準測量,這不僅確保了水域船舶通行的安全性,而且為水下救援工作的開展提供了有效指導,在水庫救援中收效良好。
參考文獻
[1]殷憲峰.一型海上支持/維護船安裝深水多波束的可行性研究[J].中國水運,2020(5):82-84.
[2]馬深.依賴多波束合成孔徑側掃聲吶圖像的水底障礙物研究[J].電子測量技術,2020,43(5):102-106.
[3]張惟河.海洋物探技術在近岸水底礁石探測中的應用[J].中小企業管理與科技(上旬刊),2020(3):186-188,191.
[4]別偉平,郭志勇,于永寬.多波束與側掃聲吶在水下障礙物探測中的綜合應用[J].港工技術,2019,56(1):157-159.
