某電動(dòng)機(jī)構(gòu)自鎖性及結(jié)構(gòu)強(qiáng)度校核計(jì)算
2020-08-12 06:48:16李永鋒寇鵬飛穆菲菲寇學(xué)鋒
科學(xué)技術(shù)創(chuàng)新 2020年21期
李永鋒 寇鵬飛 穆菲菲 寇學(xué)鋒
(陜西寶成航空儀表有限責(zé)任公司,陜西 寶雞721000)
1 概述
1.1 功能
該電動(dòng)機(jī)構(gòu)配套于某兩棲輕型飛機(jī),操縱方向舵調(diào)整片的偏轉(zhuǎn),并將偏轉(zhuǎn)角通過(guò)電位器反饋給駕駛員,從而控制飛機(jī)航向。
1.2 結(jié)構(gòu)組成及工作原理
電動(dòng)機(jī)構(gòu)結(jié)構(gòu)組成如圖1,由基座體1、電機(jī)組件2、卡箍3、齒輪組件4、輸出齒輪5、傳動(dòng)軸6、絲杠軸7、力矩螺母8、“瓦”形片彈簧9、鉸鏈軸10、傳動(dòng)桿11、T 型滑塊12 等組成。其具有體積小、重量輕、響應(yīng)速度快、位置反饋準(zhǔn)確、環(huán)境適應(yīng)性強(qiáng),能夠在工作行程任意位置自鎖等特點(diǎn),符合飛機(jī)的機(jī)動(dòng)性要求。
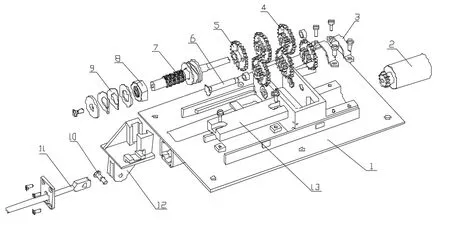
圖1 電動(dòng)機(jī)構(gòu)結(jié)構(gòu)組成及原理
工作原理:當(dāng)駕駛員需要調(diào)整飛機(jī)航向時(shí),給直流永磁電機(jī)施加正(負(fù))控制電壓,使電機(jī)正(反)轉(zhuǎn),并輸出一定的轉(zhuǎn)速和轉(zhuǎn)矩;通過(guò)六級(jí)減速器使輸出軸獲得要求的小速度和大轉(zhuǎn)矩,再通過(guò)輸出軸上的絲杠螺母機(jī)構(gòu)及基座體上T 型滑塊導(dǎo)軌機(jī)構(gòu),將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)變成直線(xiàn)運(yùn)動(dòng),最終以一定的速度和力度驅(qū)動(dòng)方向舵調(diào)整片按要求的方向和角度偏轉(zhuǎn),同時(shí)電位器將偏轉(zhuǎn)角信號(hào)反饋給駕駛員,當(dāng)?shù)竭_(dá)要求航向時(shí),駕駛員將切斷電電機(jī)電源,此時(shí)電動(dòng)機(jī)構(gòu)自鎖功能即可保證飛行按要求航向飛行。
2 技術(shù)性能
電動(dòng)機(jī)構(gòu)主要技術(shù)參數(shù)見(jiàn)表1。
3 關(guān)鍵功能結(jié)構(gòu)技術(shù)分析
3.1 自鎖功能結(jié)構(gòu)技術(shù)分析
3.1.1 技術(shù)要求
電動(dòng)機(jī)構(gòu)在工作過(guò)程任意位置可實(shí)現(xiàn)自鎖(表1)。
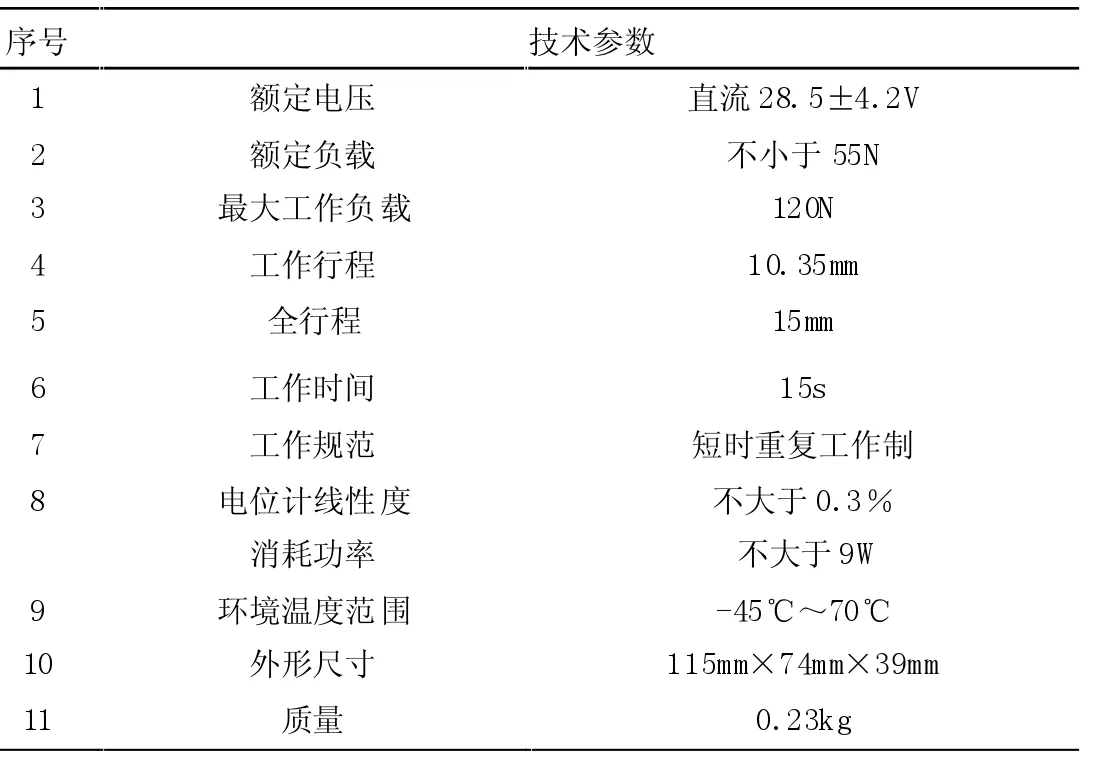
表1 方向舵調(diào)整片電動(dòng)機(jī)構(gòu)主要技術(shù)參數(shù)
3.1.2 功能結(jié)構(gòu)分析
在設(shè)計(jì)機(jī)械機(jī)構(gòu)時(shí),為使機(jī)構(gòu)實(shí)現(xiàn)預(yù)期運(yùn)動(dòng),應(yīng)避免在所需運(yùn)動(dòng)方向上發(fā)生自鎖;相反有些機(jī)構(gòu)的工作又需要其具有自鎖的特性,如該千斤頂。該電動(dòng)機(jī)構(gòu)的自鎖特性是通過(guò)螺旋輸出機(jī)構(gòu),即絲杠螺母(M6×0.75)來(lái)實(shí)現(xiàn)的。其自鎖特性具體是指只能有正向運(yùn)動(dòng),即將絲杠的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為螺母的直線(xiàn)運(yùn)動(dòng)。
3.1.3 結(jié)構(gòu)自鎖特性校核計(jì)算
a. 絲杠螺旋升角λ

式中:
L- 螺紋導(dǎo)程
d2- 螺紋中徑 取5.513
n- 螺紋頭數(shù) 取1
p- 螺距 取0.75
則螺旋升角
λ=arctg(np/πd2)=arctg(0.75/5.513π)=2.48°
b. 螺紋當(dāng)量摩擦系數(shù)fv與當(dāng)量摩擦角ρv

式中:
F- 鋼絲杠/青銅螺母摩擦系數(shù),查表材料手冊(cè):0.10~0.15
β- 螺紋牙形斜角30°
而當(dāng)量摩擦角

式中:
f- 取最小值0.10
c.自鎖性判定
當(dāng)量摩擦角與摩擦系數(shù)在給定區(qū)間(0.10~0.15) 單調(diào)性相同,故當(dāng)摩擦系數(shù)取最小值0.10 時(shí)所計(jì)算出的當(dāng)量摩擦角也是最小值,如果最小當(dāng)量摩擦角都大于螺紋升角,則表明此螺旋機(jī)構(gòu)自鎖性良好。
上述計(jì)算表明;最小當(dāng)量摩擦角ρv(6.59°)明顯大于螺紋的螺旋升角λ(2.48°)。所以,此螺旋機(jī)構(gòu)自鎖性良好。
3.2 螺旋輸出機(jī)構(gòu)及電位計(jì)超量程保護(hù)機(jī)構(gòu)技術(shù)分析
電位器工作行為10.35mm,全行程15 mm 。全行程為工作行程加上兩上螺母的寬度。設(shè)計(jì)電位計(jì)時(shí)其機(jī)械行程應(yīng)大于全行程15 mm,但受空間尺寸及重量限制,故電位計(jì)加設(shè)超量程保護(hù)機(jī)構(gòu)。
此超量保護(hù)機(jī)構(gòu)就是對(duì)稱(chēng)分布于螺桿兩端部分那一小段空刀光杠、擋圈、墊圈和串聯(lián)結(jié)構(gòu)的“瓦”形片彈簧組。具體工作過(guò)程:電位計(jì)超量程時(shí),螺旋輸出機(jī)構(gòu)將螺母旋移出螺紋,并在輸出軸向力作用下使串聯(lián)結(jié)構(gòu)的“瓦”形片彈簧組發(fā)生彈性變形,彈性變形量正好等于1 個(gè)螺母的寬度,于是螺母在空刀光杠就無(wú)沿軸向相對(duì)運(yùn)動(dòng)。那么螺母就不能推動(dòng)與T 型滑塊固連的電刷,從而有效防止了電刷超量程發(fā)生變形,甚至折斷。當(dāng)電機(jī)反轉(zhuǎn)時(shí),串聯(lián)結(jié)構(gòu)“瓦”形片彈簧組對(duì)螺母施以軸向預(yù)緊力,快速使螺母旋移到絲杠螺紋上進(jìn)入正常工作狀態(tài)。
3.3 過(guò)載保護(hù)結(jié)構(gòu)分析
當(dāng)負(fù)載力大于螺旋輸出機(jī)構(gòu)的輸出力時(shí),負(fù)載力不可能反向推動(dòng)螺母,使絲杠發(fā)生旋轉(zhuǎn)運(yùn)動(dòng),這同樣是由螺旋輸出機(jī)構(gòu)的自鎖特性來(lái)實(shí)現(xiàn)的。
4 結(jié)構(gòu)強(qiáng)度校核計(jì)算
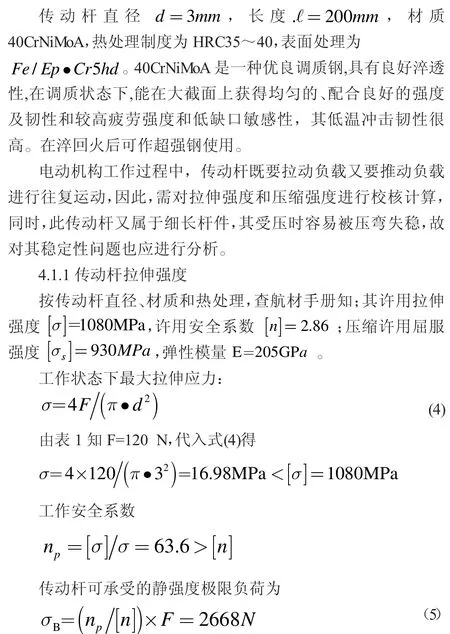
4.1 傳動(dòng)桿拉伸強(qiáng)度和壓縮穩(wěn)定性的校核計(jì)算
此值遠(yuǎn)大于HB5836-1983 要求的7 倍工作負(fù)荷(額定負(fù)載55N)的靜強(qiáng)度極限負(fù)荷值385N。故傳動(dòng)桿在拉伸狀態(tài)下是足夠安全的。
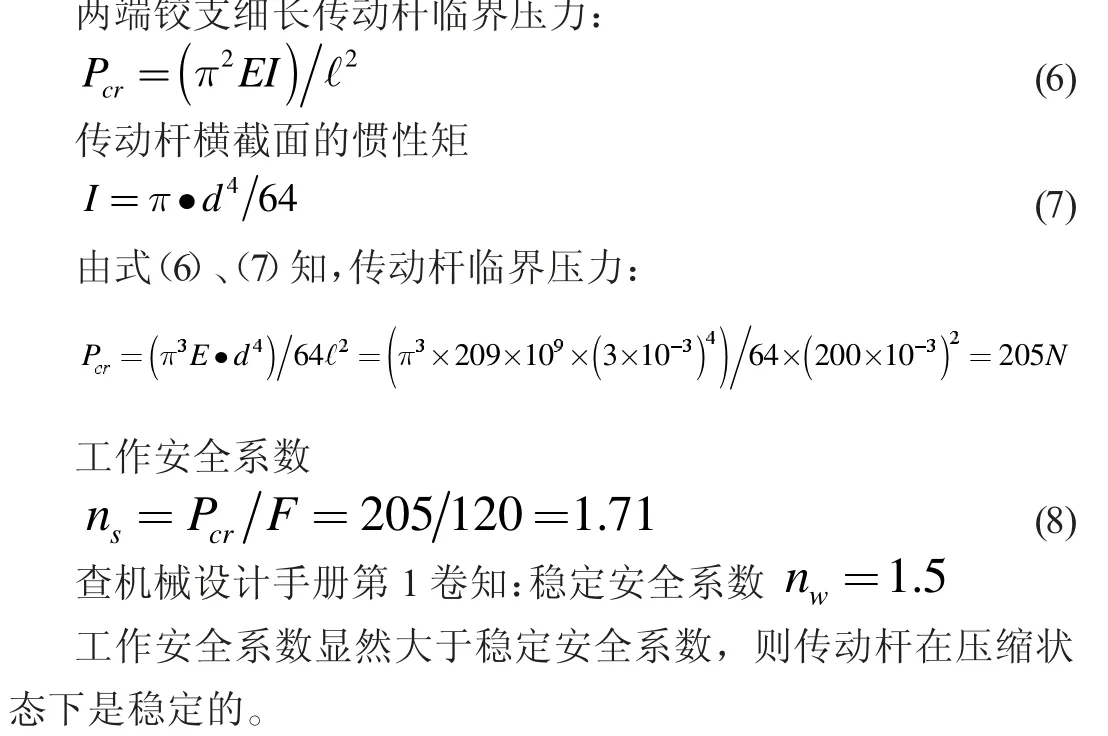
4.1.2 傳動(dòng)桿壓縮穩(wěn)定性分析與校核計(jì)算
細(xì)長(zhǎng)桿件受壓,開(kāi)始時(shí)軸線(xiàn)為直線(xiàn),接著隨著力的逐漸增大,但仍小于某一極限值(臨界壓力Pcr)時(shí),細(xì)長(zhǎng)桿件一直保持直線(xiàn)形狀的平衡,即使有微小的側(cè)向干擾力使其暫時(shí)發(fā)生輕微彎曲,但干擾力解除后,仍可獲復(fù)直線(xiàn)狀態(tài)。當(dāng)壓力超過(guò)臨界壓力Pcr時(shí),細(xì)長(zhǎng)桿受壓狀態(tài)下的直線(xiàn)平衡變得不穩(wěn)定,轉(zhuǎn)變?yōu)榍€(xiàn)形狀的平衡。壓桿喪失其直線(xiàn)形狀的平穩(wěn)而過(guò)渡為曲線(xiàn)平衡,稱(chēng)為失穩(wěn)或屈服。桿件失穩(wěn)后,壓力的稍微增加將引起彎曲變形顯著增大,桿件已喪失了承載能力。
下面采用安全系數(shù)法對(duì)細(xì)長(zhǎng)傳動(dòng)桿受壓時(shí)的穩(wěn)定性進(jìn)行校核計(jì)算。
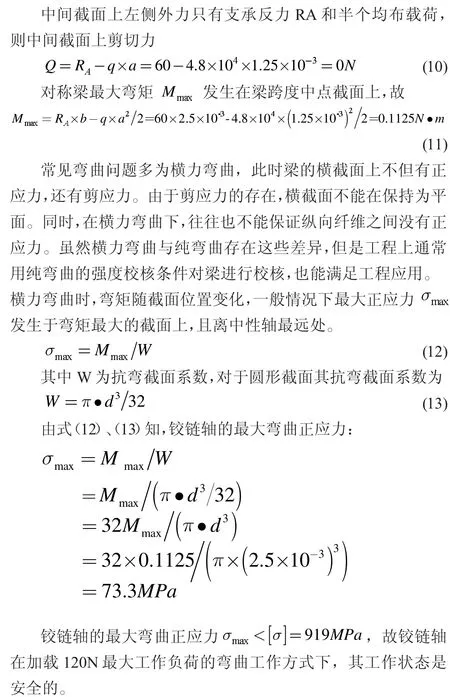
4.2 鉸鏈軸彎曲強(qiáng)度計(jì)算
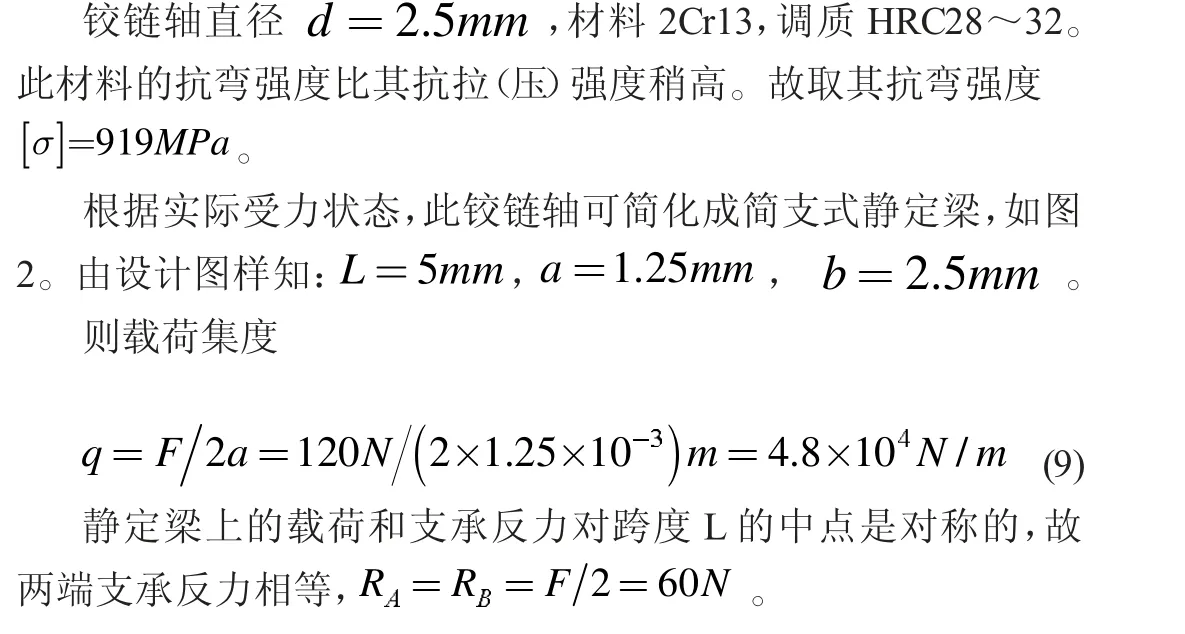
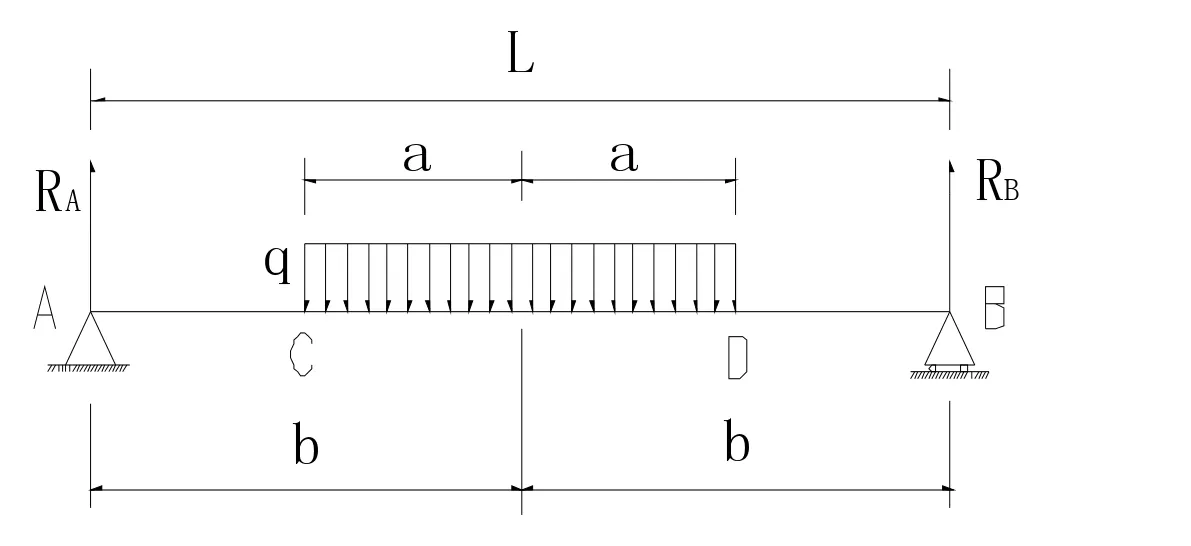
圖2 鉸鏈軸工作受力分析圖
4.3 絲杠螺母螺紋強(qiáng)度校核計(jì)算

螺紋牙多發(fā)生剪切和擠壓破壞,一般螺母的材料強(qiáng)度低于絲杠(螺桿),故只需校核螺母的螺紋牙的強(qiáng)度。
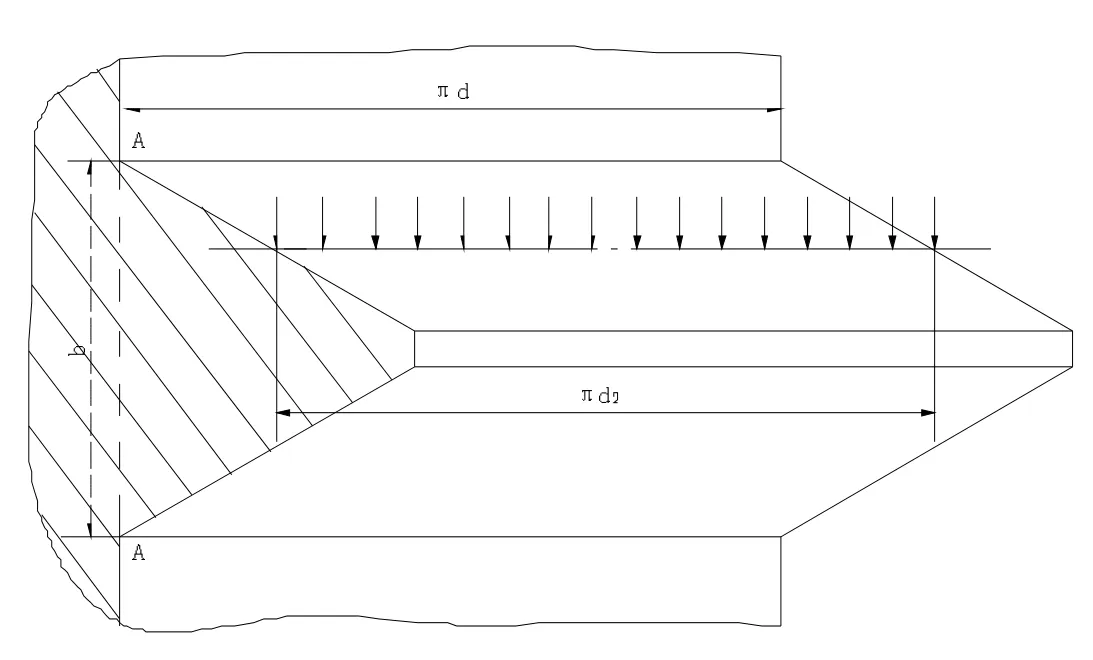
圖3 螺母螺紋圈的受力
5 結(jié)論
通過(guò)上述對(duì)電動(dòng)機(jī)構(gòu)自鎖性和結(jié)構(gòu)件薄弱環(huán)節(jié)或危險(xiǎn)剖面進(jìn)行拉伸(壓縮)、彎曲、剪切、扭轉(zhuǎn),穩(wěn)定性等單一性強(qiáng)度校核或復(fù)合性強(qiáng)度校核,表明在120N 最大工作載荷或55N 額定工作載荷下,電動(dòng)機(jī)構(gòu)在工作行程任意位置可實(shí)現(xiàn)自鎖,且工作穩(wěn)定、安全、可靠的。