太陽方位雙模式跟蹤系統的研究
2020-08-14 09:59:10樊海紅康天桂張培珍梁旺明黃汝城
現代電子技術 2020年16期
關鍵詞:數據采集
樊海紅 康天桂 張培珍 梁旺明 黃汝城
摘? 要: 針對當前太陽方位跟蹤系統跟蹤精度較低、易受天氣環境制約等問題,提出一種光控與程控相結合的高精度太陽方位跟蹤系統。該系統結合了光電式跟蹤法和視日運動軌跡跟蹤法的優點,光照強度較大時,利用光電壓進行比較控制;光照強度較小時,系統根據太陽運動軌跡計算方位差程序控制,雙模式雙軸跟蹤使得接收器始終垂直于太陽光。實驗結果表明,該系統太陽跟蹤精度誤差在0.1°~0.3°內,魯棒性更強,實現了全天候、高精度的太陽定位,為工程應用提供可靠依據。
關鍵詞: 雙模式跟蹤; 太陽方位; 雙軸控制; LabVIEW控制; 數據采集; 系統設計
Abstract: In allusion to the problems existing in the current solar azimuth tracking system, such as poor tracking precision and weather condition limitation, a high?precision solar azimuth tracking system with light control and program control is proposed. In this system, the advantages of photoelectric tracking method and solar trajectory tracking method are combined. When the light intensity is high, the photovoltage is used to conduct comparing control; when the light intensity is low, the azimuth difference is calculated for the program control according to the solar motion trajectory. The dual?mode dual?axis tracking of the system can make the receiver always perpendicular to the sunlight. The experimental results show that the solar tracking accuracy error of the system is within 0.1°~0.3°, the system has strong robust, and can realize all?weather and high?precision sun tracking. The research has provided a reliable basis for engineering applications.
Keywords: dual?mode tracking; solar azimuth; dual?axis control; Labview control; data acquisition; system design
0? 引? 言
太陽能作為一種清潔、可靠的可再生能源在當今社會扮演著重要的角色,然而太陽光照強度空間分布受氣候、時間影響不斷改變,導致太陽能利用率不高[1]。太陽方位跟蹤是提高太陽能利用率的有效途徑[2]。實踐表明,采用跟蹤法,能源接收率提高30%以上[3]。
常用的跟蹤方法主要有光電式跟蹤、太陽運動軌跡跟蹤[4]。光電式跟蹤多為采用四象限光敏電阻進行比較控制,光線充足時閉環控制精度高[5]。但受環境影響大,并不適用于傍晚、陰天等光線不足的情況;且對光電傳感器的特性一致性要求高[6]。太陽運動軌跡跟蹤是根據當地的天文地理信息來計算太陽的方位角和高度角,驅動電機轉動一定角度實現跟蹤;不受天氣、光源因素影響,但屬于開環控制,會產生誤差且系統無法消除這些誤差[7]。
整合現有技術的優勢,通過控制策略與工作原理配合,雙軸跟蹤裝置與硬件傳感器協同設計,研究一種把光電跟蹤和視日運動軌跡跟蹤結合的高精度太陽方位跟蹤系統。最終實驗結果表明,系統實現了對太陽方位高精度、全天候的跟蹤。
1? 系統組成與工作原理
1.1? 系統組成
太陽方位雙模式跟蹤系統主要由光電式傳感器、模數采集模塊、雙軸控制裝置、電機與驅動模塊、控制器和上位機組成,整體結構如圖1所示。采用四個光敏特性相同的光敏電阻作為光電式傳感器,采集平面上四象限的光照情況,采用FX2N?4AD作為光電傳感器的模擬量采集器,雙軸裝置與步進電機的結合,滿足了接收器平臺(集熱器或太陽能電池板)的二維控制,且結構簡單。以三菱PLC作為主控制器,進行數據處理、發出電機控制命令和實時上傳數據到上位機,抗干擾能力強。系統采用LabVIEW做上位機,通過計算機協議通信,可以實時地監視與控制裝置。
1.2? 系統工作原理
太陽方位跟蹤系統的目的是通過調整接收平臺的高度角和方位角,實現太陽光接收器的輻射強度始終達到最大值[8]。現有的光電跟蹤方法和視日運動軌跡跟蹤方法是無法實現太陽方位的全天候實時跟蹤,使得太陽輻射利用率低。該文研究結合主流兩種跟蹤方法,當光照強度大于設定值時,采用光控實現閉環跟蹤;當光照強度小于設定值時,采用視日運動軌跡跟蹤,即根據采集的數據算法控制。光控與程控互補結合的雙模式控制跟蹤系統使太陽能得到充分利用。
1.2.1? 光電式跟蹤
如圖2所示,光電式跟蹤利用光電傳感器實時檢測接收器平面四象限的光照強度,控制器采集數據、比較判斷太陽方位,根據偏差給出相應的控制命令驅動電機動作,閉環控制實現方位的跟蹤[9]。
1.2.2? 視日運動軌跡跟蹤
視日運動軌跡跟蹤是一種利用天文地理信息的主動式跟蹤方法,即根據太陽的運動軌跡與當地時刻、緯度和赤緯角計算出太陽的高度角和方位角[10]。空間位置如圖3所示。
根據式(1)~式(4)求出太陽的高度角以及方位角,程序控制步進電機移動一定的角度實現跟蹤。
1.2.3? 雙模式工作原理
雙軸控制裝置在主流兩種控制方法中創新設計。首先通過四個光敏元件檢測光照強度與陰晴判斷。當光照強度值在實驗所得多云天氣設定值內時,系統根據太陽方位與接收器方位的角度差值雙軸控制,步進電機每接收1個脈沖轉動0.056 25°,對太陽方位進行跟蹤。當光照強度大于實驗所得多云設定值時,系統利用光電元件的電壓進行比較,確定太陽的方位,當電壓[ΔU>ε]時,雙軸控制裝置的步進電機相應動作以實現太陽方位跟蹤;當對組壓差滿足公式:
步進電機停止動作。陰天、雨天裝置處于待機狀態。
2? 硬件設計
2.1? 控制器
該設計采用FX1N?40MT PLC作為控制器,自帶12點輸入以及24點輸出,7條特殊定位指令,內置2點100 kHz脈沖輸出端口和24 V直流輸出等特點,滿足系統設計要求,且穩定性好。該可編程邏輯控制器可擴展A/D轉換模塊與通信板,分別為光電信號采集與上位機通信提供了保障。
2.2? 光電傳感器
鑒于光敏電阻的內部光電現象與電極無關,以及成本較低,設計中采用光敏電阻作為光電元件。光電傳感器由光敏電阻、分壓電阻和電源組成。根據光敏電阻的參數與特性,光照的強弱會使光敏電阻產生不同的壓降,采集光敏電阻上的電壓值送到控制器轉換比較,即可判斷出光的方位。為提高跟蹤的精度,四個光敏電阻的特性應盡量保持一致。
2.3? 電機與驅動器
該設計選用42步進電機,通過PLC給步進電機驅動器發送脈沖來驅動步進電機,發送一個脈沖轉動一步。步進驅動器選擇TB6600升級版,只需提供方向與脈沖便能驅動步進電機。在步進角為1.8°,步進驅動器細分32的設置下,步進電機轉動一圈需要PLC發送6 400個脈沖,理論上每發送一個脈沖步進電機轉動0.056 25°,相對普通直流機具有無可比擬的精準性,可以實現對太陽方位的精準跟蹤。
2.4? 雙軸控制機械結構
如圖4所示,雙軸控制機械結構由方位角步進電機、支撐平臺、貫穿式雙輸出軸高度角步進電機、接收器平臺、擋光板和四個光電傳感器組成。利用光電式傳感器光采集比較得出或視日運動軌跡跟蹤法計算出太陽的高度角和方位角,控制器給出命令控制高度角電機和方位角電機在俯仰、水平兩個方向運動,跟蹤太陽的高度角H和方位角A,使接收器始終垂直于太陽光,提高太陽能利用率。
3? 軟件設計
3.1? 軟件流程
3.1.1? 主程序流程
雙模式太陽方位跟蹤系統控制程序在GX Works2軟件采用梯形圖編程語言編程,主程序流程如圖5所示。系統上電首先進行A/D模塊配置等初始化設置,接著根據上位機的信息以及采集的光電信號判斷是否在工作范圍內(7:00—18:00),若在工作范圍內進行下一步,否則程序一直等待。光照檢測與陰晴判斷目的是讓系統高精度、低消耗運行,雨天或陰天裝置電機不動作,減少設備運行能耗;晴天時,系統采用光電式跟蹤法閉環跟蹤太陽方位;多云天氣,控制器根據太陽的高度角、方位角計算出步進電機轉動的方向與步數,控制步進電機移動實現跟蹤。
3.1.2? 上位機流程
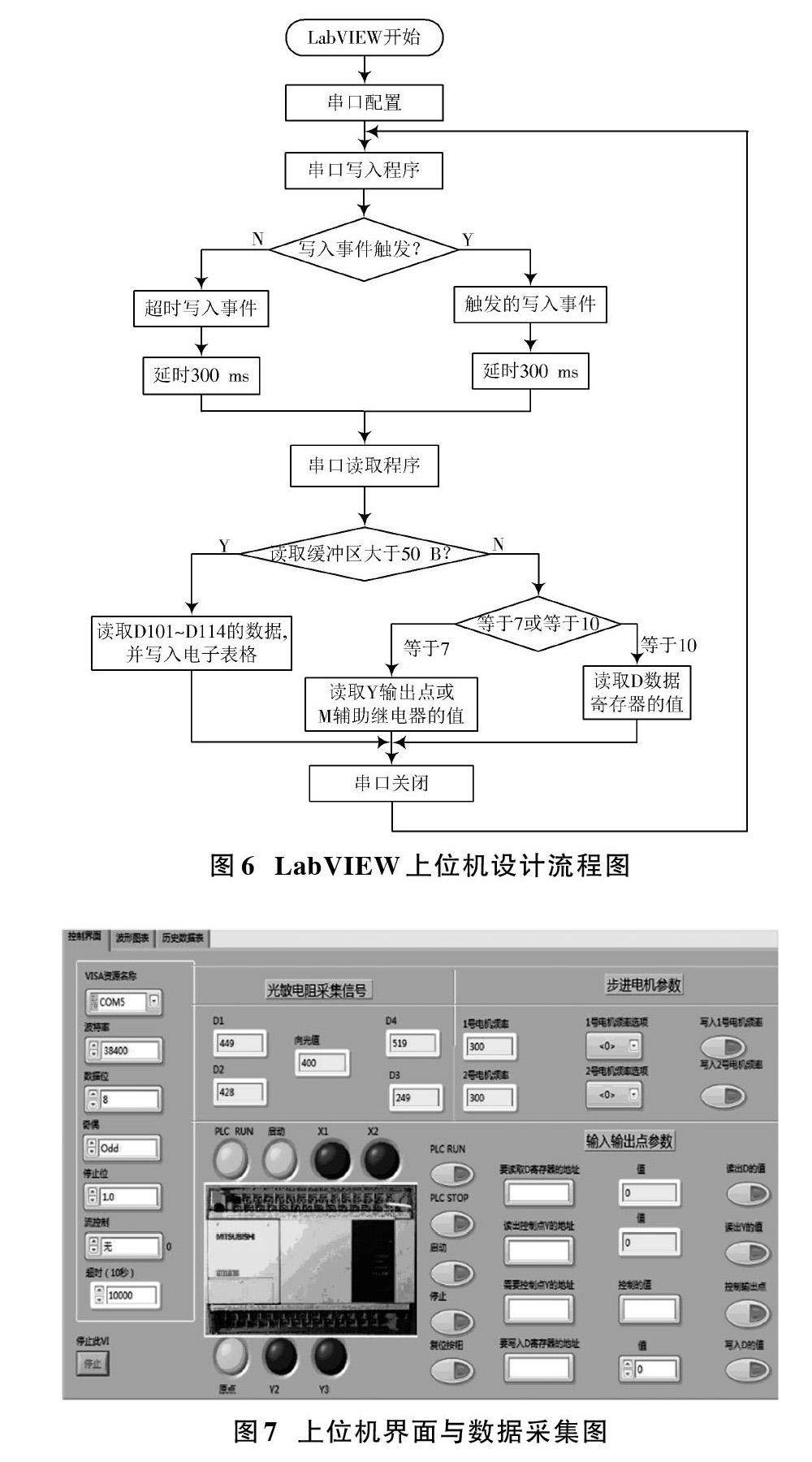
系統設計中,采用LabVIEW作上位機,利用RS 485實現PC機與PLC的串口協議通信,設計流程如圖6所示。LabVIEW的設計思路是先進行串口配置,接著進行串口數據的寫入與讀取,上位機不斷的循環串口通信[12]。由于RS 485的半雙工傳輸的特性,所以在串口寫入與串口讀出之間設置延遲時間。
3.2? LabVIEW控制與數據采集
圖7為系統設計的上位機控制前面板與數據采集圖,通過配置串口COM號、串口波特率、停止位、奇偶校驗、超時時間等,就可以進行串口數據的寫入和讀取。串口寫入采用了事件結構,超時事件選擇向串口寫入PLC查詢指令,查詢三菱PLC中D0001~D0004這4個數據寄存器的值。其他事件,例如寫入Y寄存器的值、遠程RUN、遠程STOP等,通過LabVIEW前面板對應的按鈕進行觸發。同樣串口的讀取也采用了事件結構,在事件中處理的是從PLC端讀取指令與數據。超時事件讀取了從PLC內部返回的D0101~D0114的值,即光敏電阻與步進電機參數的數字量值。串口讀取的數據以波形圖顯示,保存到歷史數據表中。
4? 實驗與結果分析
4.1? 裝置實物
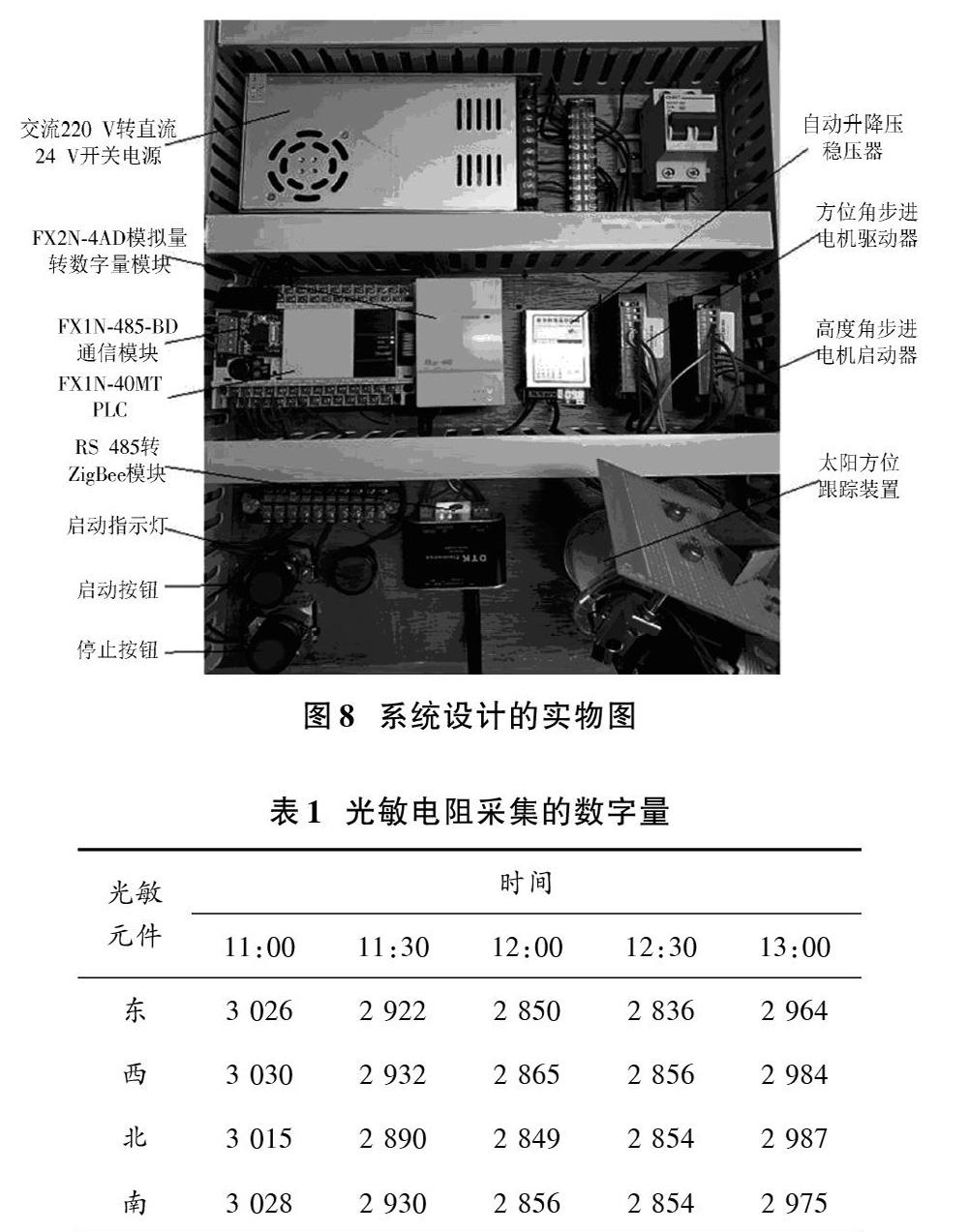
根據硬件與軟件的設計、控制策略與工作原理的配合、精準的三維建模,完成跟蹤裝置的組裝,實物圖如圖8所示。
4.2? 實驗數據
利用系統實物裝置在不同的天氣下進行實驗研究,實驗地點為廣東湛江,東經110°北緯21°。
實驗一: 2019年3月17日,天氣多云,系統通過FX2N?4AD模數轉換模塊采集到四個光敏元件(為方便理解,這里定義為東、南、西、北)的數字量信號,采集數據如表1所示。
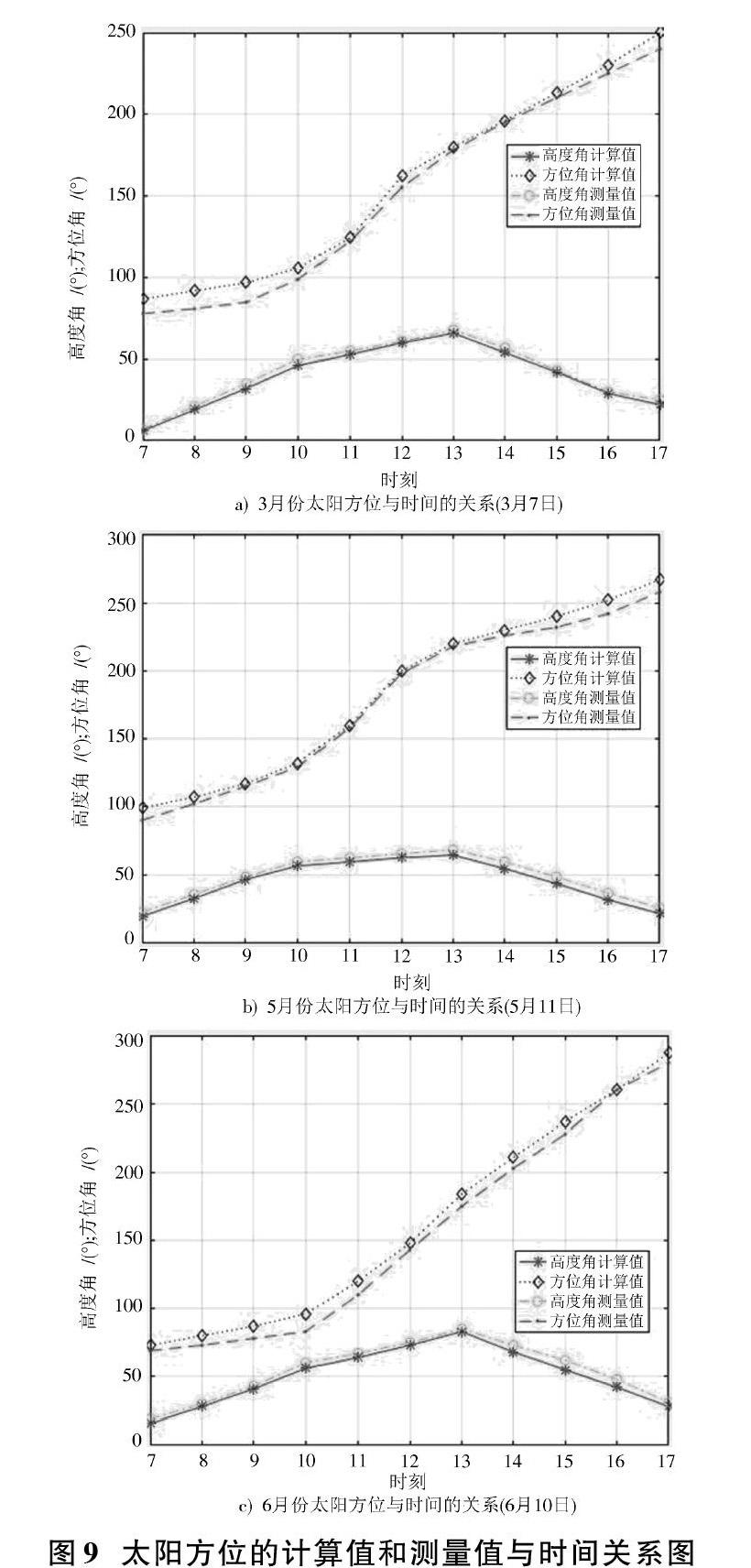
實驗二:測試太陽高度角和方位角。2019年3月7日、2019年5月11日、2019年6月10日,從7:00—17:00,每小時記錄數據。實際測試的太陽方位角和理論計算值比較如圖9所示。
4.3? 實驗結果分析
分析比較,多云天氣時,太陽光照強度不強,因此無法通過光電式進行跟蹤,系統采用的是視日運動軌跡跟蹤方法。但此時光電元件還在檢測光照情況,四象限光電傳感器采集的數字量值不僅對組(東和西、南和北)相差不大,而且四個數字量值均相差不大,說明接收器平面是垂直于光源的,進一步說明多云天氣采用視日運動軌跡跟蹤精度準確。在抽取的3月、5月、6月測試實驗中,太陽方位測量值與天文算法計算出的計算值進行比較,誤差在0.1°~0.3°內。驗證了雙模式太陽方位跟蹤系統研究方案的可行性。
5? 結? 語
該文研究的太陽方位雙模式雙軸跟蹤系統,利用光控與程控相結合的方法應對不同的天氣狀況,融合了光電式跟蹤和視日運動軌跡跟蹤的優點,互相彌補不足。通過數學計算、控制策略與工作原理分析,實現雙軸控制,從而實現太陽方位的多氣候精準跟蹤。
通過硬件設備的選擇、實物的組建以及實驗分析,驗證了設計方案的合理性與可行性,為工程應用提高理論基礎。
參考文獻
[1] 金朗,曹飛韶.我國可再生能源發展現狀與趨勢[J].生態經濟,2017,33(10):10?13.
[2] 朱國棟,王成龍,馬軍,等.一種高精度太陽跟蹤控制裝置研究[J].傳感技術學報,2018,31(6):830?835.
[3] 徐煒君,原大明.視日軌跡太陽能反饋跟蹤系統的設計與實現[J].化工自動化及儀表,2016,43(8):855?858.
[4] 路瑤,何秋生,苑偉華,等.太陽跟蹤方法綜述[J].自動化技術與應用,2014,33(5):1?4.
[5] 王男男,周倫,丁虹民.基于STM32的光伏發電自動跟蹤系統設計[J].電源技術,2017,41(2):247?249.
[6] 姚仲敏,潘飛,譚東悅.新型光伏發電智能追光系統設計[J].太陽能學報,2016,37(5):1174?1179.
[7] 申來明,楊亞龍.一種利用單片機實現太陽跟蹤的設計方法[J].現代電子技術,2014,37(10):158?162.
[8] 牟如強,李樂.基于單片機的新型太陽能雙軸跟蹤裝置設計[J].組合機床與自動化加工技術,2018(3):148?150.
[9] 武志強,馬民,路志明,等.最佳傾角的單軸逐日系統設計研究[J].現代電子技術,2019,42(1):73?78.
[10] 馬帥旗.基于PSD的太陽方位對準系統研究[J].計算機工程與應用,2014,50(15):215?219.
[11] 陳健婷,溫銀婷,傅守忠.最佳太陽方位角的計算[J].肇慶學院學報,2014,35(2):20?22.
[12] 馬敏,楊勝偉.基于LabVIEW的氣體監測系統串口通訊設計[J].自動化與儀表,2016,31(11):43?46.
猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15
電子技術與軟件工程(2016年22期)2016-12-26 11:11:30
現代電子技術(2016年22期)2016-12-26 09:44:35
電子技術與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識與技術(2016年27期)2016-12-15 20:42:01
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
